基于相互测距信息的机群组网协同定位技术
2012-06-22刘俊成张京娟冯培德
刘俊成 张京娟 冯培德
(北京航空航天大学 仪器科学与光电工程学院,北京100191)
现代战争的作战模式已经由以平台为中心的单独对抗发展成以网络为中心的体系对抗[1-2],近年的局部战争,如海湾战争、伊拉克战争等已经证明现代战争是以信息化为主要特征的一体化程度很高的战争,敌我双方的较量不再仅仅是人与人、武器与武器的对抗,而是体系与体系之间的对抗.因此,在网络中心战条件下,为了提高整体作战效能,实现资源优化配置,降低战争成本,作战飞机将会成群出动[3],组成机群网络共同执行任务,机群组网将成为空中行动的一种工作模式.
机群组网、协同空战的关键技术之一是机群的精确定位技术[3].目前使用的方法主要是惯导/GPS(Global Positioning System)组合定位方法,因为GPS易受干扰且战时不能依赖,所以,在无GPS条件下如何提高机群导航定位精度成为亟待解决的问题.文献[4]中利用相互测距和测向信息进行惯导水平位置误差(简称为惯导位置误差)估计,文献[2,5]用基于机间相互测距信息的Kalman滤波方法来解决这一问题,这个方法存在两个不足:①当惯导位置误差和机间距离数量级相当或者惯导位置误差大于机间距离时,量测方程线性化误差过大,导致无法估计惯导位置误差;② 滤波的状态方程认为惯导位置误差不变,不能用于长时间估计惯导位置误差.为了解决这两个问题,本文提出了一种基于相互测距信息的几何图形平移旋转的协同定位方法.
1 机群组网协同定位原理
考虑到惯导系统的定位误差服从正态分布这一特征,工作在同一位置的多套惯导通过对输出取加权平均的办法可明显提高其定位精度,但是,由于受惯导体积、重量及成本的限制,在多数情况下一架飞机仅装1~2套惯导,加权平均的思路很难实施.将上述思路应用到一个机群,为每个节点配置一套机载数据链,利用机载数据链实时测量并相互通报各惯导的位置和它们之间的距离,利用距离信息和惯导提供的位置信息,采用几何图形平移旋转的协同定位方法来估计每套惯导的位置误差,这样可以达到与加权平均类似的效果.
定义由惯导系统输出的各节点水平位置组成的多边形为惯导多边形,定义由测距值计算确定的各节点水平位置组成的多边形为量测多边形.
由于测距值的精度远高于惯导定位精度,所以量测多边形可以较准确地反映各节点在空间中的相对位置,根据测边秩亏自由网基准理论[6],将量测多边形的形心平移至惯导多边形的形心,然后按照D最小这一原则使量测多边形旋转一定角度,所得量测多边形各节点位置即为飞机的估计位置,其中D的表达式为


2 机群组网协同定位系统构成
2.1 机群组网协同定位系统的硬件构成
机群中的每架飞机称为一个节点,每个节点的协同定位系统都由一套机载数据链、一套惯导系统和一套组网计算机组成.
协同定位过程中,选取当地地理坐标系为导航系,3轴的方向分别为东向、北向和天向,本节点的惯导数据传送给机载数据链,传输的惯导数据包括经度λ、纬度φ、高度h、状态字和帧号,机载数据链具备实时测距和通信功能,利用无线电测量得到机群内各节点两两之间距离(i=1,2,…,n,i≠j),同时利用无线电通信实时相互通报惯导数据和测距信息,最后,所有节点惯导数据和测距信息全部传送至组网计算机,进行协同定位计算.节点协同定位系统构成如图1所示.
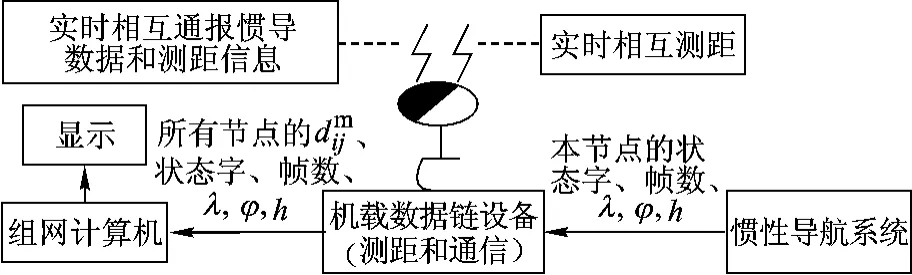
图1 节点协同定位系统构成
作为系统的核心设备之一的机载数据链是基于数据链技术的链路设备,可以构成点对点、一点对多点的数据链路和网状数据链路.美军和北约集团自20世纪60年代初开始研制数据链,根据不同时期的作战需要和技术水平,开发了一系列数据链[7-8]:Link-4,Link-10,Link-11,JTIDS(Joint Tactical Information Distribution System),Link-22以及IFDL(Inter/Intra-Flight Data Link)等,其中JTIDS和IFDL具有实时测距和通信功能.美国主战机型全部配备有机载数据链设备.国内数据链的研究工作起步较晚,但发展很快,西安导航研究所等诸多院所都对数据链进行了研究.2005年中俄联合军演中,我军首次对外公开了天上、水面和水下的数据链系统.
2.2 测距方案
机群到指定空域集结之后,根据飞机的时间系统,机群的数据链在某个指定的时刻开机,开始测距.无线电测距常用的有3种方式:单程测距法、双向双程测距法和双向单程测距法.单程测距法需要昂贵的高精度晶振,双向双程测距设备复杂,且难以进行多机同时测距,因此协同定位系统采用双向单程测距法,原理如下.
节点i配备的数据链设备(下面称为设备i)发射单程测距信号,同时接收其他设备的单程测距信号,以设备i和j之间的相互测距为例,设Δtij为设备i和j的时钟之间的时间不同步值,tij为设备i和j之间的无线电信号传播时间,T1为设备i测得的信号传播时间,T2为设备j测得的信号传播时间,则有

测距过程中,设备i和j工作机制完全相同,以设备i为例,设备i测得T1,同时接收设备j传输过来T2,则由式(2)和式(3)计算可得

tij乘以光速即可得设备i和j的测距值.由此可见,双向单程测距法可以计算出机间距离,同时也可以计算出机载数据链设备时钟之间的时间不同步值,利于多机同时测距.
2.3 协同定位过程中的时间同步问题
机群组网协同定位过程的时间同步问题是:
1)各节点的机载数据链时钟之间时间同步问题.机载数据链要实现同步相互测距必须有统一时标,但各机载数据链开机时刻无法做到精确的时间同步,因而它们的时标之间存在时间不同步值.在双向单程测距方法中,根据式(5)可以计算出时钟之间的时间不同步值.以某台机载数据链设备时钟为参考基准,调整所有设备时钟即可以实现时间同步;
2)节点i的惯导与机载数据链设备之间的时间同步问题.因为机载数据链i的同步测距时刻不一定是惯导i的测量时刻,所以机载数据链设备i和惯导i之间存在时间不同步值ΔTi.ΔTi是随机常数,如果采用100 Hz输出的惯导系统,则ΔTi在±5ms以内,假设飞机航速为280m/s,则ΔTi造成的距离误差在±1.4 m以内,这个值相对惯导位置误差来说可以忽略,因此在协同定位计算过程中可以认为机载数据链和各惯导系统之间时间同步.
3 机群组网协同定位算法
3.1 机群组网协同定位算法
3.1.1 确定量测多边形各节点的概略坐标

1)由节点间的三维测距值计算节点间的概略水平距离.节点i和节点j之间的相互测距值dmij可以表示为

式中为机间水平距离;为水平距离误差;vij为测距误差为测距方差.因为高度值相对水平位置误差要小的多,所以可用代替zi进行计算,则机间水平距离可以表示为

2)任意给定一个起算点和起算方向,根据水平距离计算量测多边形各节点概略坐标.
在确定节点i(i=3,4,…,n)的概略坐标的过程中,需要确定节点i在起算方向的左侧还是右侧,此信息从先验的机群队形知识中获得.
3.1.2 利用间接平差法确定量测多边形


将式(8)代入式(9),并将式(9)线性化,写为
3.1.3 几何图形平移旋转法估计惯导位置误差
量测多边形表示机群各节点比较精确的相对位置,其起算点和起算方向是任意给定的,因此,量测多边形不包含各节点绝对位置信息.要利用量测多边形和惯导多边形来估计惯导位置误差,必须建立基准.
1)根据测边秩亏自由网基准理论[6],建立基准实质上是建立相对各节点近似坐标的基准,保证自由网中的重心坐标保持不变.惯导多边形表示各节点近似坐标,保证自由网中的重心坐标保持不变即是平移量测多边形,使其形心Om与惯导多边形形心Oc重合,如图2,1~5为飞机编号.
2)旋转量测多边形,使D最小,如图3所示.D的表达式为
3.2 仿真分析
仿真条件设置如下:组网节点数为5,且各飞机初始位置均匀分布在以坐标原点为中心,以1 km为半径的圆平面上,机群飞行高度为7 km,高度误差的标准差为20 m,机群一直北飞,航速为280 m/s,航向角ψ为0.机载数据链输出同一时刻测距值,测距值误差的标准差为10 m.惯导i的东向和北向位置误差由短时间内位置误差模型生成,如式(15)所示.



图3 几何图形旋转

图4 仿真计算流程图
用修正前和修正后的惯导位置误差的标准差r和r'评价定位效果,表达式为

仿真结果如表 1和图 5,其中表 1为t为600.1s时的机群组网协同定位结果.图5为t从600s开始,惯导1协同定位15min的定位结果.

表1 协同定位结果 m


从图5可看出,协同定位算法有效延缓了惯导位置误差的发散速度,惯导东向和北向位置修正值分别随东向和北向位置误差均值的变化而变化.如果惯导系统的输出位置出现同向的误差,例如东向位置误差均为正误差,则东向位置误差均值为正误差,此时协同定位算法无法修正此误差.
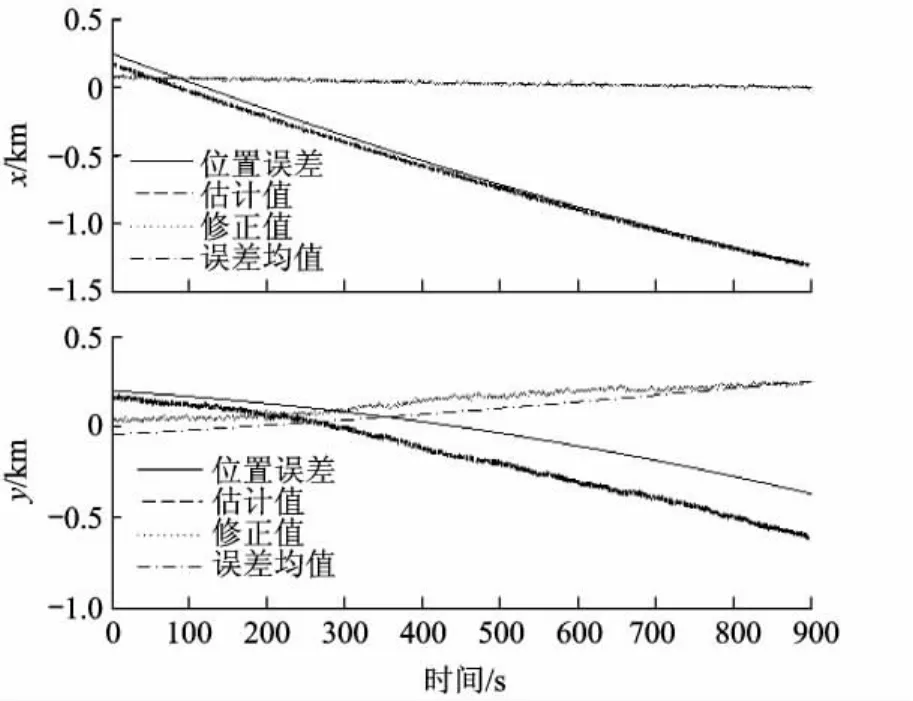
图5 惯导1的协同定位结果(15 min)
4 结论
1)几何平移旋转协同定位技术结合导航技术和测量平差理论,从机群“网络”层面出发,解决了当惯导位置误差和机间距离数量级相当或者惯导位置误差大于机间距离时,文献[2,5]中Kalman滤波方法无法估计惯导位置误差的问题,前提是需要有机群队形的先验知识;
2)几何平移旋转协同定位技术可用于长时间估计惯导位置误差,有效延缓了惯导位置误差的发散速度,惯导位置修正值随位置误差均值的变化而变化;
3)如果5架飞机组网定位,测距误差标准差为10 m,几何平移旋转协同定位技术可以使机群惯导位置精度将提高2倍左右;
4)机载数据链的造价数十万,与升级惯导系统本身提高同样倍数精度所需要的投入相比,数十万的花费相对比较低廉,因此机群组网协同定位技术达到了提高精度和降低成本的双重目标.
References)
[1]Yao Yong,Li Zhi.Research of information dissemination model based on network-centric warfare[C]//Yao Yong.Proceedings 2010 IEEE International Conference on Information Theory and Information Security. Beijing:IEEE Computer Society,2010:962-965
[2]谢淑香.基于相互测距信息的机群组网定位技术[D].北京:北京航空航天大学仪器科学与光电工程学院,2007
Xie Shuxiang.New approach for swarming aircraft positioning via network information[D].Beijing:School of Instrument Science and Opto-electronics Engineering,Beijing University of Aeronautics and Astronautics,2007(in Chinese)
[3]蓝伟华,喻蓉.多机编队协同空战的概念及关键技术[J].电光与控制,2005,12(6):12-15
Lan Weihua,Yu Rong.Concept and critical techno-logies in cooperative air combat for airplane formation[J].Electronics Optics & Control,2005,12(6):12-15(in Chinese)
[4]张共愿,程咏梅,程承,等.基于相对导航的多平台INS误差联合修正方法[J].航空学报,2011,32(2):271-280
Zhang Gongyuan,Cheng Yongmei,Cheng Cheng,et al.A joint correcting method of multi-platform INS error based on relative navigation[J].Acta Aeronautica et Astronautica Sinica,2011,32(2):271-280(in Chinese)
[5]冯培德,谢淑香,张京娟.机群组网定位的一种新途径[J].北京航空航天大学学报,2006,32(11):1263-1267
Feng Peide,Xie Shuxiang,Zhang Jingjuan.New approach for swarming aircraft positioning via network information[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(11):1263-1267(in Chinese)
[6]崔希璋.广义测量平差[M].武汉:武汉大学出版社,2009:20-190
CuiXizhang.GeneralAdjustment[M].Wuhan:Wuhan University Press,2009:20-190(in Chinese)
[7]Edward K L.Air-to-ground targeting UAVs,data links and interoperability(project extender)[J].Aeronautical Journal,2004,108(1088):493-504
[8]李宏智.战术数据链的发展与作战应用[J].舰船电子工程,2010(4):1-5
Li Hongzhi.Development and operational application of tactical data links[J].Ship Electronic Engineering,2010(4):1-5(in Chinese)
[9]Abusali P A M,Tapley B D,Schutz B E.Autonomous navigation of global position system satellites using cross-link measurements[J].Journal of Guidance,Control and Dynamics,1998,21(2):321-327
[10]Lin Yiming,Chu Haibin,Qin Zizeng.GNSS autonomous navigation integrity weighted technique base on crosslink[J].Journal of NationalUniversity ofDefense Technology,2010,32(5):49-54
[11]Qian Yingjing,Jing Wuxing,Gao Shangsheng.Autonomous navigation method for multi-satellites mission[J].Journal of Harbin Institute of Technology,2010,42(5):705-709
