大功率狭缝式活塞激励器流场测量与分析
2012-06-22刘贺
刘 贺
(清华大学 航天航空学院,北京 100192)
董金钟 伍耐明
(北京航空航天大学 能源与动力工程学院,北京 100191)
大功率狭缝式活塞激励器流场测量与分析
刘 贺
(清华大学 航天航空学院,北京 100192)
董金钟 伍耐明
(北京航空航天大学 能源与动力工程学院,北京 100191)
研制了一种大功率活塞射流激励器,出口瞬时速度峰值可达0.3 Hz,通过对活塞激励器射流流场测量,得到激励器出口流场速度、涡量分布,分析得到激励器合成射流流动结构与特征,通过采用活塞激励器控制同轴射流掺混,实验结果证明此种活塞激励器可以用于相对较高的速度流场的主动流动控制.利用提出的设计方法设计合成射流激励器可以在激励器出口形成稳定的对涡结构,采用一定的激励频率即可对喷管气流掺混进行有效控制.研究表明,合成射流激励器作为主动流动的执行机构,在航空动力排气系统具有潜在的重要价值.
主动流动控制;狭缝式;活塞激励器;涡对
合成射流技术是近年国内外提出的一种新的流动主动控制概念.以合成射流激励器作为控制元件,利用合成射流激励器产生能量、动量、尺度和频率可控的涡旋,作用于被控气流,使其流动结构得到控制.合成射流激励器具有结构简单、重量轻、易于实现等良好等特点[1-7].国外的一些研究机构正将合成射流技术应用于机身/翼面减阻、机体外部气动力控制、推力矢量控制、燃烧室油/气掺混控制等研究方向,并取得了很大的进展[8-13],国内一些单位也在某些方向上取得了一些技术成果[14-16].合成射流技术在低速流动控制上有着良好的作用和效果.
膜片激励器由于各方面的限制因素,导致出口速度小,激励射流能量低,无法满足高速气流合成射流控制的需要.研究大功率合成射流控制器的目的在于提高控制效果,直接利用活塞在气缸中的运动,与膜片式激励器相比可大大提高膜片振幅,通常振幅可以提高一个数量级,其出口速度也将提高一个数量级.利用活塞在气缸中往复运动,压缩、抽吸气体,对被控气流产生一吸一吹的脉动激励,活塞激励器的渗透能力更强,可以对大范围的高速流动进行有效控制.活塞激励器通常利用电机进行驱动,改变电机的转速即可改变激励频率,改变活塞的行程可以改变激励强度.当利用电机对这种激励器进行驱动时,激励频率将受到电机转速的限制,因此它的激励频率不高,通常在200~500 Hz.
通过对活塞激励器射流流场测量,得到激励器出口流场速度、涡量分布,分析得到激励器合成射流流动结构与特征,通过采用活塞激励器控制同轴射流掺混,实验结果证明此种活塞激励器可以用于相对较高的速度流场的主动流动控制.研发更高出口速度的活塞激励器使得高速流动的主动控制的实现成为可能.
1 试验设备
1.1 狭缝式活塞激励器设计
先前采用的活塞激励器由于密封和摩擦损失等因素的限制,出口最大速度比较低,通过改进密封、润滑与活塞内空腔大小等措施,研制了一种活塞射流激励器(如图1a所示).直流电机驱动活塞往复运动,在活塞气缸壁上开缝0.5mm×12 mm(如图1b所示),通过控制直流电机的转速,调节气缸壁上出口形成的喷射气流速度,对所要控制的主流气体进行激励控制,实现合成射流激励器的作用.
活塞式合成射流激励器工作原理如图1c,参照现有的一些活塞激励器,为了实现提高出口流速的目的,从以下几方面进行改进:①曲轴、连杆、活塞的润滑均采用曲轴箱内的机油,只要旋转部件中有部分浸油高度达到1 mm即可实现充分润滑.一定要控制浸油高度,否则会造成高速旋转部件动力损失过大.②曲轴的密封采用设置在曲轴箱中的橡胶密封圈;活塞的密封是靠活塞与活塞缸的配合间隙控制.采用一体成型的活塞缸壁与出气喷嘴,喷嘴出口狭缝采用线切割加工,最大限度的减小气流在压缩过程中的损失,保证气体全部通过出口狭缝喷射出激励器,提高射流速度与气量.③曲轴箱出气口容积应尽量小,以减小气流的动力损失.④为了便于手动与自动调速控制,对驱动电机配设了调速装置.⑤在一定负载力矩情况下,电机负载特性良好,转速下降不显著,具有良好的高速运动特性(动平衡性),运行平稳,噪音小.⑥散热性能良好,电机带有冷却风扇,可长时间持续工作.
根据计算和试验结论选择设计参数如下:电机功率200 W,转速5 000~24 000 r/min(空载),工作电压220 V;PWM直流调速电源输入电压220 V,输出电压0~220 V,最大功率375 W,最大电流4 A;活塞直径 13.7 mm,行程 3 mm,排量0.44 cm3;气动腔体腔体出口缝隙长度12 mm,宽度0.5 mm.
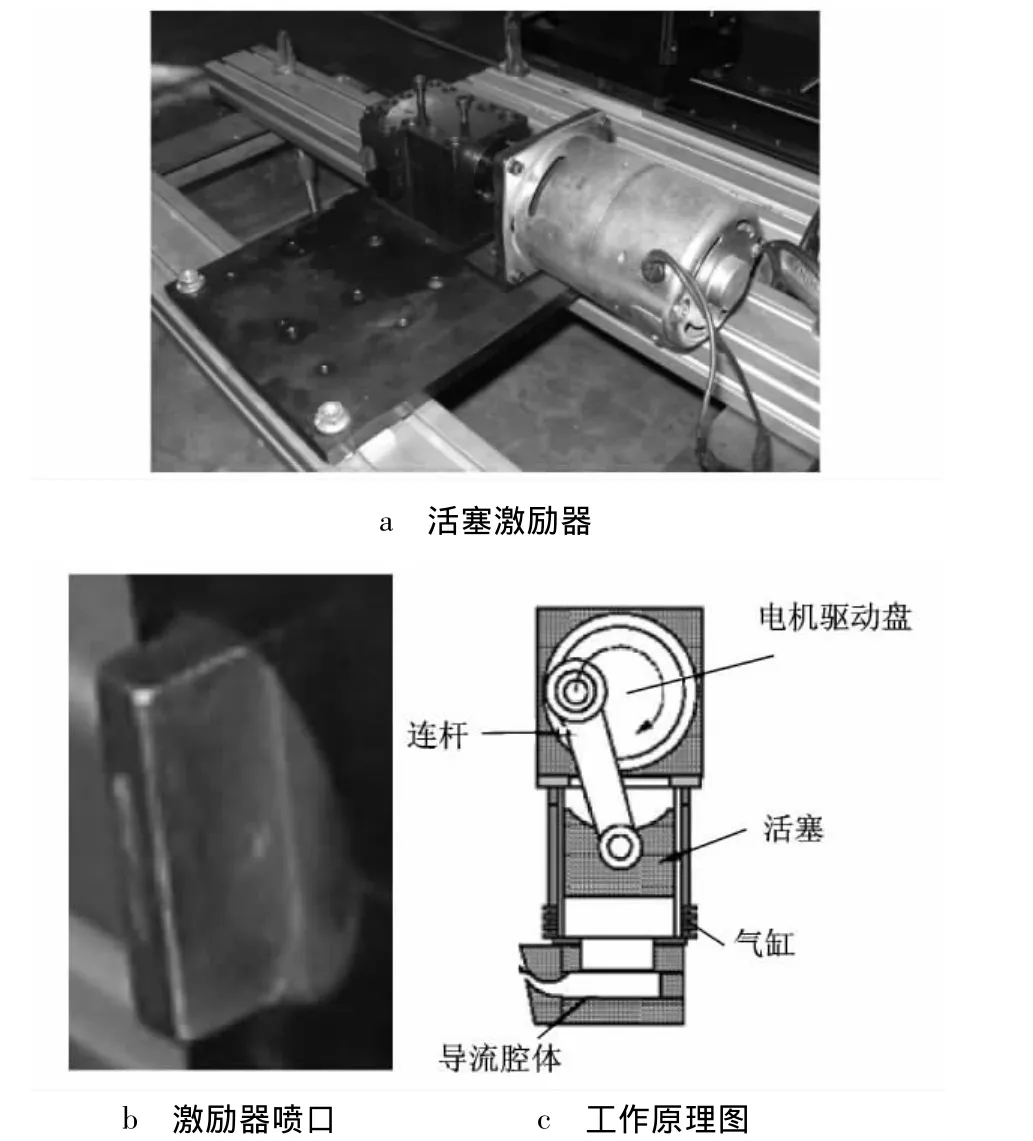
图1 合成射流示意图和激励器实物
1.2 测试系统
热线风速仪主要用于流场内单点的瞬时速度、脉动速度和速度方向的测量.实验采用美国TSI公司生产的热线风速仪,它具有调试简单,高响应,高精度等一系列特点,是流体测试中较为先进的测试设备.数据的测量精度是0.001 m/s,采样频率为10K/s.粒子成像测速技术(PIV,Partical Image Velocimeter),突破了空间单点测量的局限性,实现了对二维流场速度分布的瞬态测量,如图2所示.本实验采用TSI公司二维粒子图像测速仪,采用乙二醇加热后产生的雾滴作为示踪粒子,测量区域的起始点距喷管出口3 mm.
1.3 活塞激励器控制同轴射流速度掺混的装置
射流掺混实验中采用活塞激励器,内涵外径φ10 mm,外涵外径φ25 mm,内管端面与收敛喷管端面平齐.图3说明活塞激励器与同轴射流的安装示意图.两个活塞激励器紧贴喷管出口,活塞激励器的出气方向与喷管射流流动方向垂直.活塞行程为3 mm,激励器工作频率依靠控制活塞驱动电机转速实现.电机可在0~15000 r/mim之间无级调节,使激励频率在0~250 Hz间无级调节.激励器出气口面积为:12×0.5 mm2.
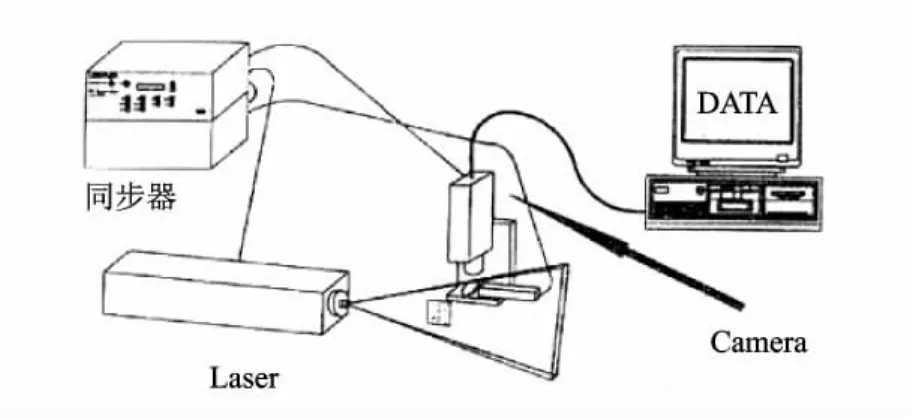
图2 PIV测量系统工作示意图
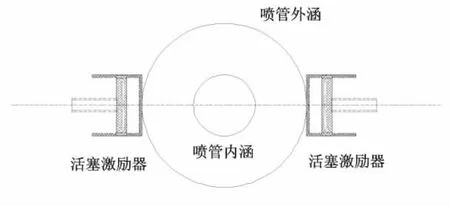
图3 活塞激励器与同轴喷管结构示意图
2 试验结果与分析
2.1 活塞激励器出口流场测量
为了研究激励器射流流场结构特征,本文首先对激励器在静环境流场中的射流进行了试验测量.图4是采用 PIV测量的活塞激励器在15000 r/min转速下的速度分布和涡量分布.T是激励器活塞振动周期,从速度场和涡量图上可以看出,距离出口较近处,激励器的抽吸作用影响主流,超过一段距离后,激励抽吸不再影响流动.
在t/T=0时,从激励器出口喷射出高速气团,气团中心位置锁相平均速度达到30 m/s左右,在气团两侧伴有一对强烈旋转的涡对,两个旋涡运动方向相同,旋转方向相反,涡对对中间气流运动起到一个引射和压缩的效果,使涡对中间的气体速度增加,在t/T=0.125时,高速气团的中心锁相平均速度达到42 m/s(瞬时速度可达100 m/s),对应的涡对涡量也从t/T=0时的小区域高涡量变成细长的涡量区域,主喷射气流速度虽然增加,但是旋涡由于气体粘性的作用,涡逐渐拉伸、破裂,能量逐级传递给越来越小的涡旋,高速气团的中心向远离喷管出口方向移动了10 mm,此时激励器出口喷射气团的速度达到最大值,此后涡对继续拉伸、破裂,最终当旋涡尺度足够小的时候,也就是达到了耗散尺度时,由粘性来耗散掉它得到湍流动能,这时旋涡就是稳定的,不会再破裂,就形成耗散涡.从t/T=0.5开始,激励器进入“吸气”过程,出口没有新的气团产生,出口附近有吸气现象发生,原有的气团继续运动,伴随涡对的旋转,与周围环境空气混合.到t/T=0.875“吸气”过程结束,在下一个周期的t/T=0时,激励器开始新的“吹气”过程,喷口出现新的喷射气团和对应产生的涡对,上一周期产生的气团在下游还没有完全消失,周而复始,形成连续的涡系.
随着活塞往复运动,激励射流不断被抽吸因而在喷口附近形成涡对,但是涡对在向外平移扩展的过程中很快就破碎并融进主流中.所以,激励射流的形成是由于连续的涡对的涡量不断补充到主流中的结果.这些旋涡不断破碎并卷吸周围流体,使得流体具有一定的动量从而维持射流的连续性.
活塞激励器出口流场的流线图如图5所示,从图中可以清晰的看到鞍点(S1,S2,…)和焦点(N1,N2,…).t/T=0 时刻,激励器喷出气团左右伴随2个旋涡向远方运动,两个旋涡的焦点为N1和N2.在N1和N2中间位置的气流受到挤压效果的作用,气流通道变小,气流加速,在其外侧有小尺寸的涡形成的焦点N3和N4,在涡的卷吸过程中,主流一侧的两涡N1和N3之间形成鞍点S3,对应一侧形成 S4.t/T=0.25时刻,鞍点消失,焦点N3和N4远离N1和N2.在t/T=0.5时,激励器进入“吸气”过程,激励器出口中心位置形成鞍点S,激励器出口气流分为两部分,S上游气体被吸入激励器,S下游气体在涡对和惯性的作用下继续往下游运动,此时涡对没有新的能量的注入,涡继续衰减,N1和N2之间的距离也开始逐渐变大.当t/T=0.75时,激励器“吸气”过程即将结束,新的喷射气团在下一周期的t/T=0时刻从激励器出口喷出,开始“吹气”过程.激励器出口连续不断的形成有规律的涡对,这些旋涡不断破碎并卷吸周围流体,使得流体具有一定的动量从而维持射流的连续性,构成了激励器的特殊流场结构.正是由于激励器有此结构,激励器才能在矢量偏转和气流掺混过程中起到相应的作用.
2.2 活塞激励器对同轴喷管流动速度掺混试验
2.2.1 喷管出口气流掺混特征
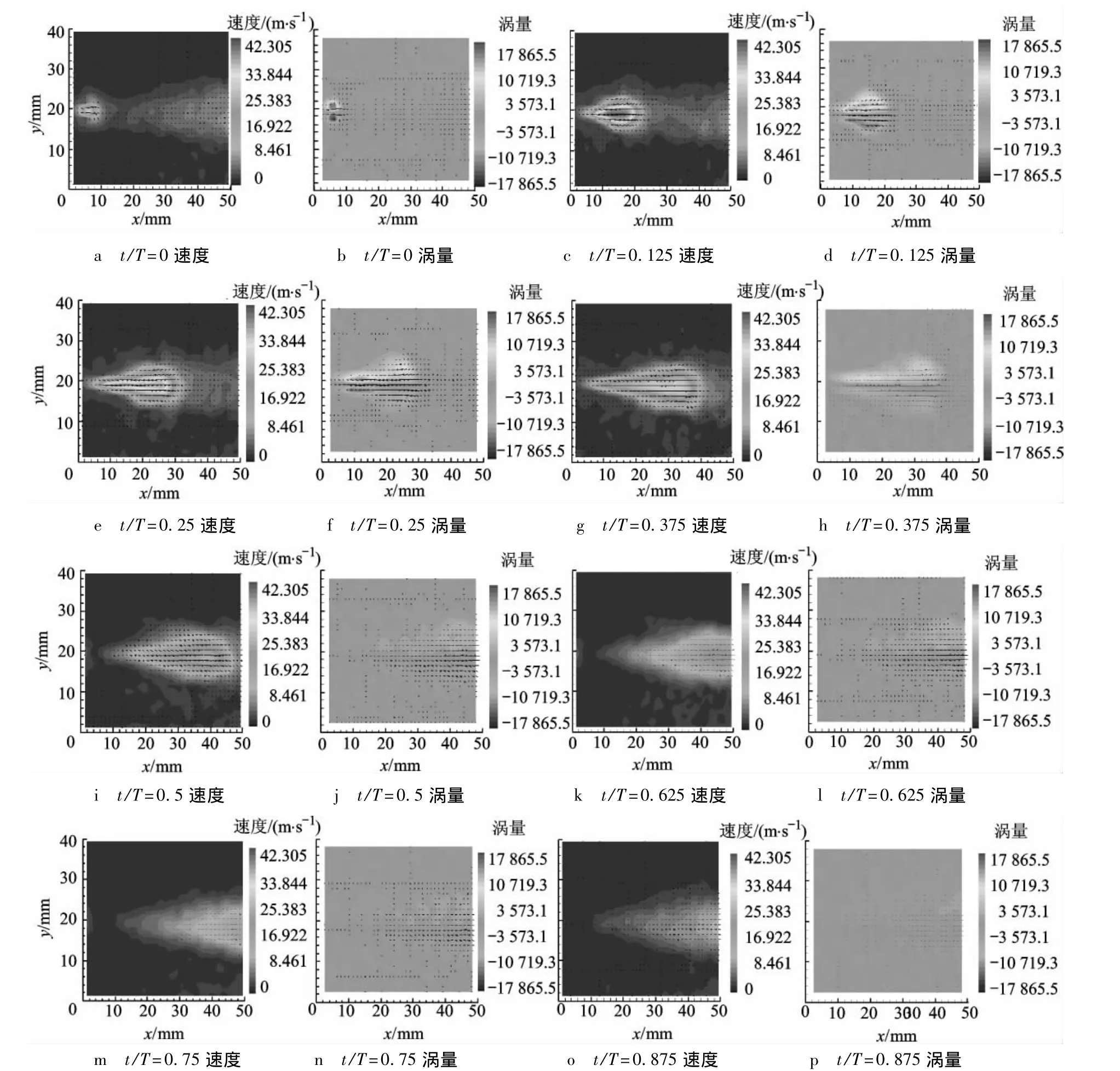
图4 活塞激励器在15000 r/min下的射流速度和涡量场
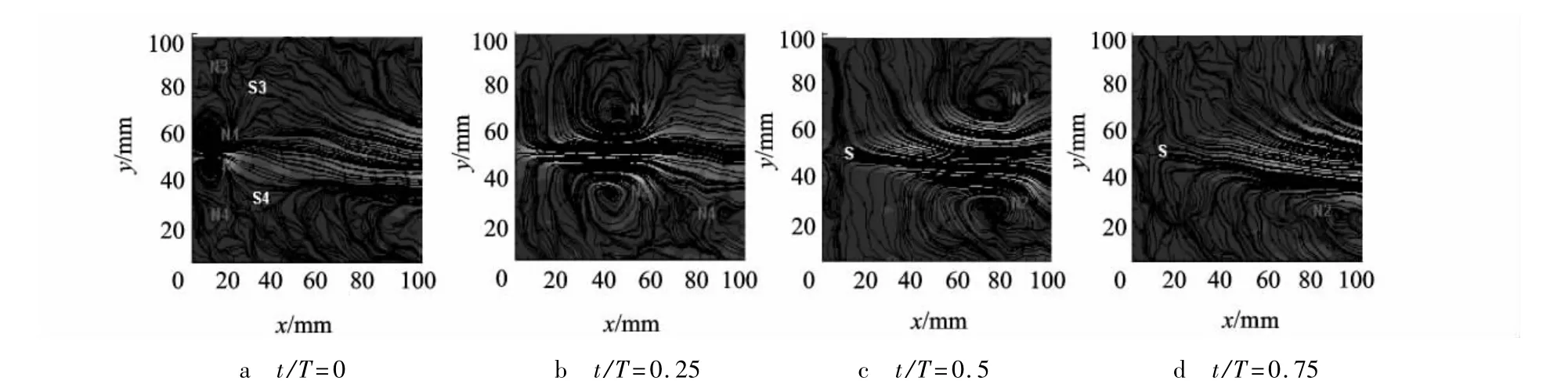
图5 活塞激励器出口流场的流线图
为了验证所设计的活塞激励器能否实现主动流动控制,对活塞激励器控制同轴喷管流动速度掺混进行了实验测量.当激励器不工作时,内涵气流与外涵气流形成的剪切层,外涵气流与环境气流产生的剪切层都较薄,高速核心区的长度较长,激励器工作时,由于激励器产生的气流作用于外涵气流,所以外涵气流与环境气流形成的剪切层变厚很明显,外涵气流与环境气流间的速度梯度变小.激励器的能量穿过外涵后作用于内涵气流,剪切层变厚的现象很明显,射流核心区的长度变短.图6是涡量变化,由于外涵面积比较小,内外涵之间的内剪切层与外涵和环境之间的外剪切层合二为一,无转速的情况下,高涡量区域明显,剪切层明显,激励后高涡量区域消失,气流速度分布均匀.
实验中喷管内外涵速度分别为40 m/s,20 m/s(基于内涵参数的雷诺数Re=2.6×104).在活塞激励器作用下的掺混流场速度分布、涡量分布、湍流度分布如图6所示.图中激励流场与无激励作用的流场比较,分别测量了喷管出口原始流场的对应参数.其中图6a和图6b是激励器工作前后时均速度场的对比(其中凹陷处为测量背景反光形成).掺混射流流动方向从右至左.
激励器不工作时,内涵气流与外涵气流形成的剪切层,外涵气流与环境气流产生的剪切层都较薄,高速核心区的长度较长,激励器工作时,由于激励器产生的气流作用于外涵气流,所以外涵气流与环境气流形成的剪切层变厚很明显,外涵气流与环境气流间的速度梯度变小.激励器的能量穿过外涵后作用于内涵气流,剪切层变厚的现象很明显,射流核心区的长度变短.图6c和图6d是涡量变化,由于外涵面积比较小,内外涵之间的内剪切层与外涵和环境之间的外剪切层合二为一,无转速的情况下,高涡量区域明显,剪切层明显,激励后高涡量区域消失,气流速度分布均匀.
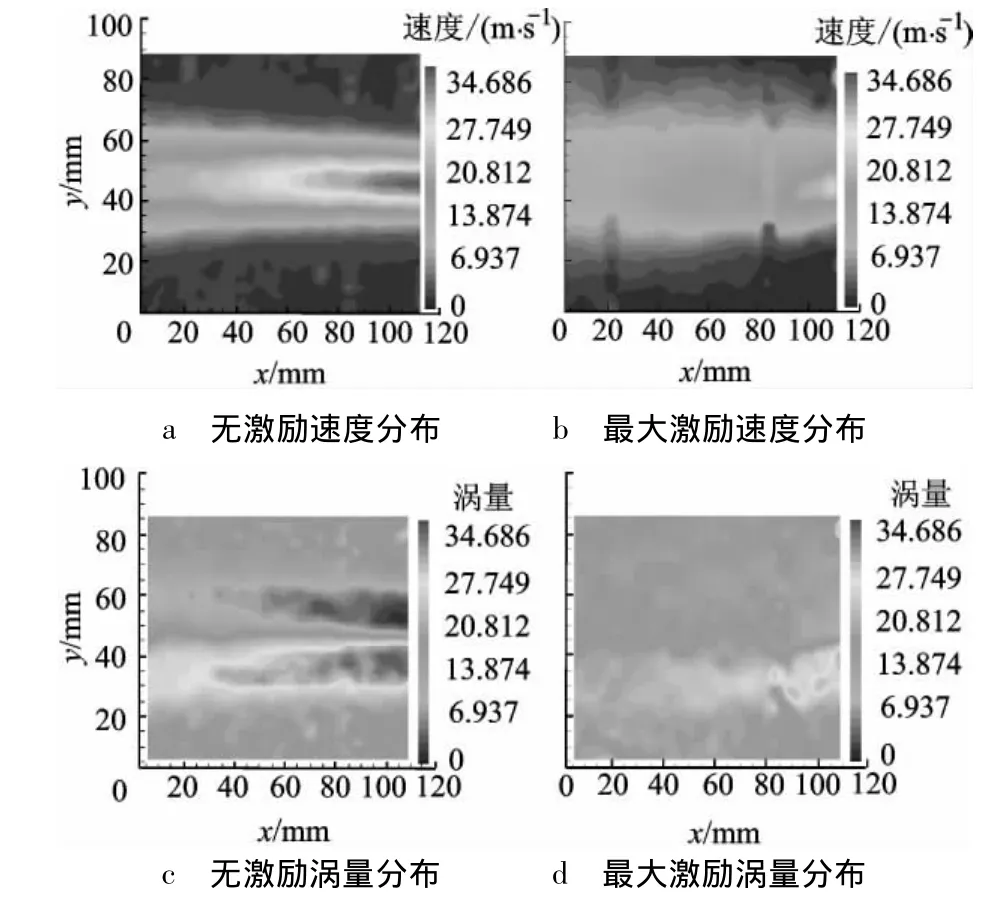
图6 无激励(0 r/min,0 Hz)和最大激励(15000 r/min,250 Hz)的速度和涡量
取y/D=0,0.32和0.5截面(D 为喷口出口直径),其速度在有无激励的情况下对比,如图7所示.
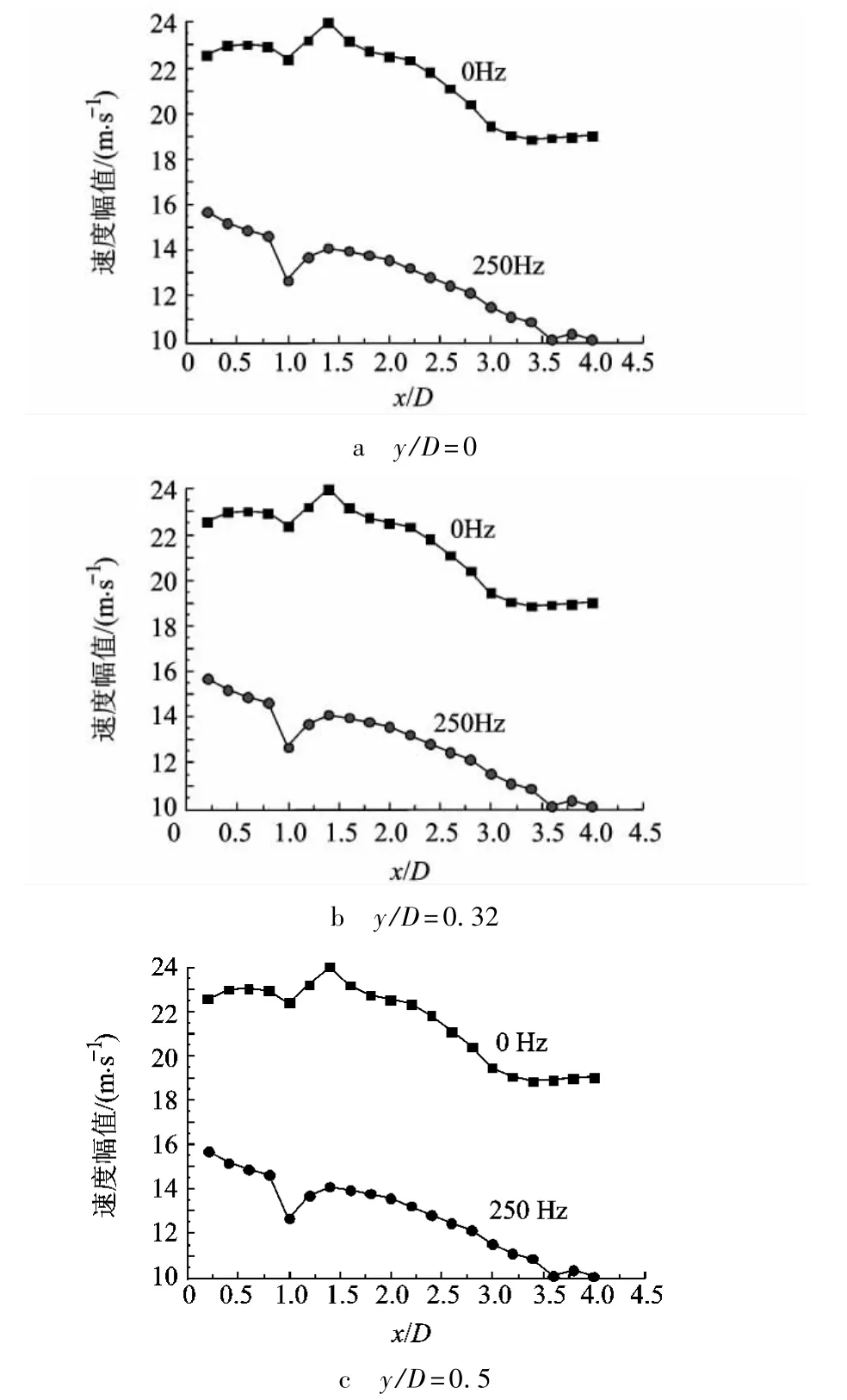
图7 y/D=0,0.32 和0.5 截面上的速度分布
从图7可以看出,y/D=0(流场内涵气流中心)在激励250 Hz(15000 r/min)时内涵中心轴线上的速度要比无激励时下降,射流在x/D=0处内涵轴线速度由34 m/s降低到 22 m/s,降低了35%,x/D=1附近激励后流场速度的突降是由于此处受“吸气”影响,速度衰减剧烈,后方区域不受“吸气”影响,只通过涡对掺混;x/D=4处,内涵轴线速度由21 m/s降低到10 m/s,气流内外涵掺混效果提高导致内涵的高速核心气流区域明显变短.y/D=0.32处于内外涵的交界处,在x/D=0处,速度由22.5 m/s降低到16 m/s,降低了29%,这是由于激励器的作用,外涵低速气体与内涵高速气体掺混更均匀.在y/D=0.5截面,在x/D=0处激励后速度略有提高,这是由于激励器喷射气流在这个位置射出的结果,当x/D>0.5,所有激励后的速度均低于无激励速度,外涵气流与环境大气充分掺混,速度迅速降低,流场趋于均匀.整个流场在激励器作用下,流场速度变化非常明显,证明合成射流激励器对此工况下的同轴射流掺混有明显改善掺混效果的作用.
2.2.2 径向速度分布

图8 x/D=0,0.6,2 和4 截面上的速度分布
时间平均速度在流向距离 x/D=0,0.6,2和4处沿y向的分布显示在图8中.靠近射流的出口平面,内外涵之间剪切层的梯度较大,最大速度出现在射流的对称轴上,由于内外涵速度相差很大,所以内剪切层发生动量的交换很大,内涵速度的变化在y向上梯度很大,外剪切层也因两侧的速度差较大导致外剪切层在y向上速度梯度很大,由于在近口处,剪切层还很薄,而外涵流场y向范围很宽,所以此处的流向速度有一段平稳段,在激励作用下,激励射流还没有完全发展,所以对整个y向流向速度的贡献不明显,当远离掺混射流的出口时,内外涵速度及环境速度差进一步缩小,所以外涵流场处的平稳段消失,内涵和外涵速度减小,外界环境速度在掺混作用下略有提升,整个流场速度在y向上趋于均匀.
2.2.3 激励频率对速度掺混的影响
电机转速不同时,激励器的激励频率不同.改变激励频率时的掺混效果如图9所示.此时内涵流速56m/s,外涵流速28m/s(基于内涵参数的雷诺数 Re=3.5×104),电机转速分别为 0 r/min(无激励),8 000 r/min,10 000 r/min 和 15 000 r/min.由活塞单激励器特性可知,激励电机转速越大,激励器出口喷射气团平均速度越大.如图9所示,激励电机转速越大,主流高速核心区长度缩短越多,气流内外剪切层越厚,流场掺混越均匀.
图10表示喷管内涵出口流速沿轴向分布.激励电机转速越大,内涵流速越低,高速区长度越短.
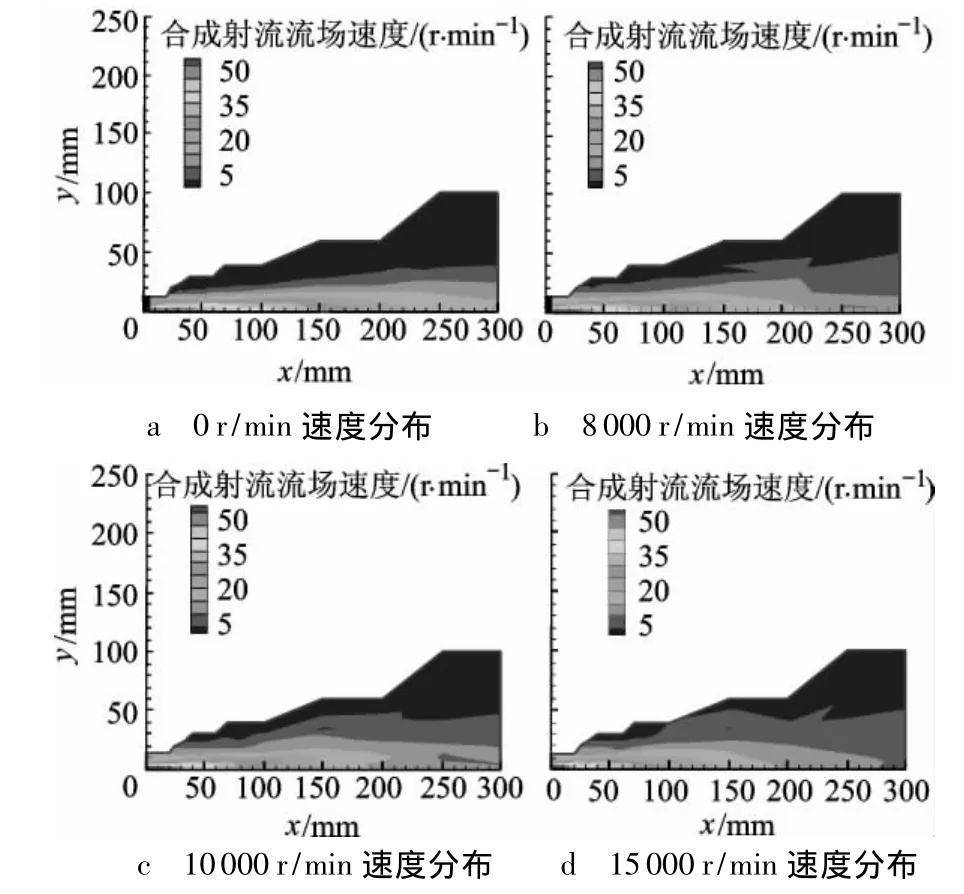
图9 不同转速下的合成射流流场速度分布
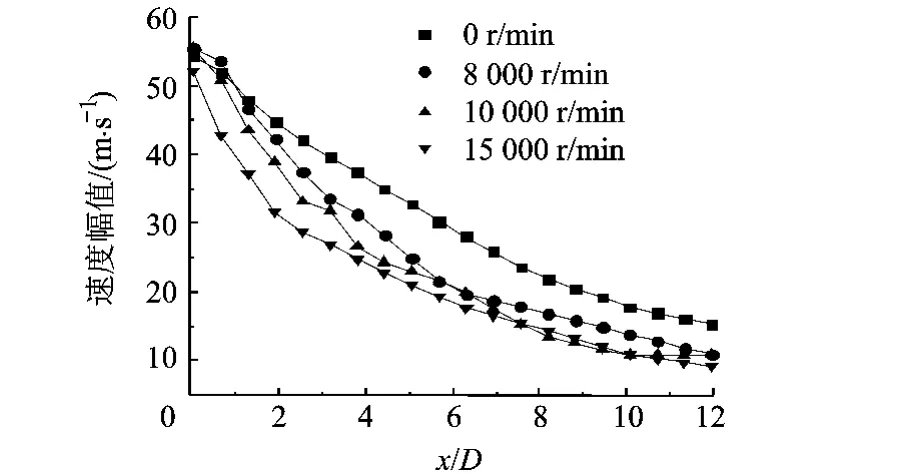
图10 轴线速度在不同电机转速下的变化
3 结论
1)研制了大功率活塞式射流激励器.
2)在最大工作参数下,所研制的激励器出口最大瞬时速度峰值达到100m/s左右,PIV测量经过锁相平均后的最大瞬时速度为42 m/s.
3)在最大工况下,激励器可以加速同轴射流剪切层的摻混,合理的组合与使用此种活塞激励器,可以实现较高速度的同轴射流增强掺混效果.
(References)
[1]Sefcovic J A,Smith D R.Proportional aerodynamic control of a swept divergent trailing edge wing using synthetic jets[R].AIAA 2010-92,2010
[2]Farnsworth J A N,Vaccaro J C,Amitay M.Active flow control at low angles of attack:stingray unmannedaerial vehicle[J].AIAA Journal,2008,46(10):2530-2544
[3]Shea P R,Smith D R.Aerodynamic control of a rectangular wing using gurney flaps and synthetic jet[R].AIAA 2009-886,2009
[4]Slipher C A,Hubbard J E.Exploitation of higher order membrane modes for improved synthetic jet performance [J].AIAA Journal,2009,47(6):1388-1407
[5]Smith B L,Glezer A.Vectoring and small-scale motions affected in free shear flows using synthetic jet actuators[R].AIAA 97-0213,1997
[6]Guo Dahai,Vectoring control of a primary jet with synthetic jets[R].AIAA 2001-0738,2001
[7]罗振兵,朱伯鹏,夏智勋,等,合成射流激励器对射流矢量影响研究[J].推进技术,2004,25(5):405-410
Luo Zhenbing,Zhu Bopeng,Xia Zhixun,et al,Jet vectoring using synthetic jet actuators[J].Journal of Propulsion Technology,2004,25(5):405-410(in Chinese)
[8]Kral L D.Active flow control technology [R].ASME FEDSM2001-18196,2001
[9]Rathnsingham R,Breuer K S.Coupled fluid-structural characteristics of actuators for flow control[J].AIAA Journal,1997,35(5):832-837
[10]Chen F J.Development of synthetic jet actuators for active flow control at NASA Langley[R].AIAA 2000-2405,2000
[11]Kral L D.Numerical simulation of synthetic jet actuators[R].AIAA 97-1824,1997
[12]Smith B L.Glezer A.The formation and evolution of synthetic jets[J].Phys Fluids,1998,10(9):2281-2297
[13]Gilarranz J L.A new class of synthetic jet actuators part I,design,fabrication and characterization[J].Journal of Fluids Engineering,2005,127(2):367-376
[14]罗振兵,,夏智勋,方丁酉.合成射流影响因素[J].国防科技大学学报,2002,24(3):32-35.
LuoZhenbing,Xia Zhixun,Fang Dingyou.The factors influencing the synthetic jet[J].Journal of National University of Defense Technology,2002,24(3):32-35(in Chinese)
[15]罗振兵,夏智勋,胡建新,等,相邻激励器合成射流流场数值模拟及机理研究[J].空气动力学学报,2004,22(1):52-59
Luo Zhenbing,Xia Zhixun,Hu Jianxin,et al.Numerical simulation and mechanism study of the interaction of adjacent synthetic jet actuators[J].ACTA Aerodynamica Sinica,2004,22(1):52-59(in Chinese)
[16]罗振兵,夏智勋,方丁酉,等,合成射流激励器初步实验及实验结果分析[J].宇航学报,2004,25(2):201-204
Luo Zhenbing,Xia Zhixun,Fang Dingyou,et al.Experimental investigation on synthetic jet actuator[J].Journal of Astronautics,2004,25(2):201-204(in Chinese)
Measurements and analysis of high-power slot-type piston actuator flow-field
Liu He
(School of Aeronautics and Astronautics,Tsinghua University,Beijing 100192,China)
Dong Jinzhong Wu Naiming
(School of Jet Propulsion,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
A high-power piston actuator was investigated and peak instantaneous velocity could be up to 0.3 Mach number.Exit velocity and vorticity distribution were obtained through experimental measurements.Synthetic jet flow structure and characters were investigated.Coaxial jet mixing was controlled by piston actuator,indicating which can be used in relative high velocity field to realize active flow control.The results show that the steady vortex pair at export can be formed by using the design methods of synthetic jet actuator presented.The mixing for nozzle flow can be effectively controlled with a certain excitation frequency.It presents that synthetic jet actuator can be used as the implementation of active flow control and has potentially important value to air power exhaust system.
active flow control;slot-type;piston actuator;vertex pair
V 211.3
A
1001-5965(2012)02-0195-07
2010-07-20;< class="emphasis_bold">网络出版时间:
时间:2012-02-21 11:46;
CNKI:11-2625/V.20120221.1146.017
www.cnki.net/kcms/detail/11.2625.V.20120221.1146.017.html
刘 贺(1979-),男(满族),辽宁本溪人,博士后,liu_he5656@sina.com.
(编 辑:张 嵘)
