利用一次雷达实现低空空域的安全监视
2012-06-22陈唯实宁焕生
陈唯实 宁焕生
(北京航空航天大学 电子信息工程学院,北京 100191)
利用一次雷达实现低空空域的安全监视
陈唯实 宁焕生
(北京航空航天大学 电子信息工程学院,北京 100191)
介绍了一种低成本的低空空域雷达监视实验系统,并提出了一种基于雷达平面位置指示(PPI,Plane Position Indicator)图像的目标检测与跟踪算法,其中杂波抑制和目标状态估计是两项关键技术.经过背景差分的雷达PPI图像,仍然含有大量的背景边缘杂波,该算法利用其空域特性进行杂波抑制,并采用交互式多模型(IMM,Interactive Multiple Models)方法对目标的匀速、加速、减速、转弯等机动运动进行跟踪.详细分析了仿真数据的跟踪效果,并将整套算法应用于两组实测PPI图像,实验结果说明其有效性.
低空空域;雷达;检测;跟踪;交互式多模型
低空空域通常是指3 000 m以下通用航空飞行活动的范围,我国空管部门将在“十二五”规划中逐步推动其全面开放.低空航空器目标小、机动性高、自主性强,如果擅自飞行,难以准确掌握其飞行动态;同时,低空空域紧邻地表,受地形影响,现有地面设施难以对低空航空器进行连续不间断的监视.因此,低空空域成为空中安全防卫和监视的薄弱环节.随着低空空域管理改革的深入,对低空飞行活动的限制将逐步放松,低空飞行活动的多样化和灵活性对国家空防安全保障提出了挑战.对重要敏感目标、人口密集城镇、边境地带、沿海等区域的低空飞行活动的监视能力亟待加强.针对低空飞行的特点,低空空域安全监视的主要手段包括新型低空一次雷达、无源探测、浮空器探测和多源综合监视等技术[1].一次雷达是依靠自身发射无线电脉冲,通过检测目标对脉冲的反射信号确定目标方位距离的一种无线电探测设备,其具有成本低、架设方便、独立工作性强等特点,是低空空域安全监视的重要手段.
本文将讨论一种基于一次雷达的低空空域监视实验系统.第1部分首先简述成熟的一次雷达低空空域监视系统,然后介绍本实验系统的框架;第2部分详细讨论作为系统核心技术的低空目标检测与跟踪算法,经过背景差分的一次雷达图像仍还有大量杂波,其主要分布于背景的边缘区域,因此,本算法中的杂波抑制部分针对一次雷达图像杂波分布的特点,利用空域特性检测目标并剔除虚警,进而利用时域特性进行目标状态估计;第3部分分别对仿真数据和雷达实测数据进行处理与分析;最后作出结论.
1 低空空域雷达监视系统
低空空域雷达监视系统具有广泛的应用前景.对于我国现有的预警探测网未能覆盖的重点区域,可选择性地布防低空一次雷达监视系统,弥补其监视盲区.另外,一次雷达系统可通过浮空器(飞艇、预警飞机等)搭载升至几百至几千米的高空,形成航空应急救援体系中临时的飞行安全管制平台.
1.1 国外成熟系统
目前,基于一次雷达的低空空域监视系统国际上已有应用,并出现了一些成熟系统.其中,De-Tect研制的 HARRIER系统[2]和 Sicom研制的ACCIPITER系统[3]是其典型代表,如图1所示.

图1 国外成熟的低空空域雷达监视系统
一次雷达本身不具备动目标检测和跟踪的功能,成熟的低空空域雷达监视系统通常采用一部低成本的一次雷达,由图像采集卡将雷达平面位置指示(PPI,Plane Position Indicator)图像传输给计算机,再由后端的雷达多目标检测与跟踪算法对其进行处理,从中提取出动目标信息.由于系统监视的区域为低空空域,背景环境复杂,噪声干扰强,而被跟踪目标一般是回波信号较弱的小型飞行器,优良的检测与跟踪算法成为提高系统探测能力的关键.
1.2 实验系统
现阶段,我国空管部门缺乏低空空域的监视手段,军民航同时建设各自的保障设施,且覆盖面很不均衡;加之通用航空器机载设备简单,飞行高度低,导致现行空管保障手段无法对其进行实时跟踪监视[4].本文搭建的“低空空域雷达监视实验系统”如图2所示.该系统采用的X波段海事雷达属于一次雷达,无需机载设备的协同工作,适于对通用航空器实施跟踪监视.

图2 低空空域雷达监视实验系统
低空目标包括生物(如飞鸟)和非生物(如飞行器)两大类.本系统已经成功地应用于机场鸟击防范,基于水平和垂直两种扫描方式进行了大量探鸟实验,验证了其对生物目标的探测能力[5].同样,本文利用该系统进行低空飞行器等目标的探测,实现低空空域安全监视.第2部分详述的低空目标检测与跟踪算法是该系统的核心技术,其以飞鸟目标检测与信息提取技术为基础[6],针对雷达PPI图像的特点,在杂波抑制和目标状态估计两方面进行了补充完善,显著提高了算法性能.
2 低空目标检测与跟踪算法
基于雷达PPI图像的低空目标检测与跟踪算法流程见图3,算法主要包括动目标检测和目标跟踪两大部分,将低空目标轨迹和速度信息从复杂的雷达图像中提取出来并与卫星地图或坐标系叠加,生成便于观测的融合图像.
经过背景差分的雷达图像,去除了主要的背景信息,但仍含有大量边缘杂波,本算法结合目标和杂波的空域特性,使边缘杂波得到了有效抑制,详细讨论见2.1节.低空空域安全监视要求获得机动目标的运动轨迹,并对其运动趋势做出预测.目标跟踪算法基于量测值,采用交互式多模型(IMM,Interactive Multiple Models)对低空目标的匀速、加速、减速、转弯等机动特性进行精确预估和校准,详细讨论见2.2节.
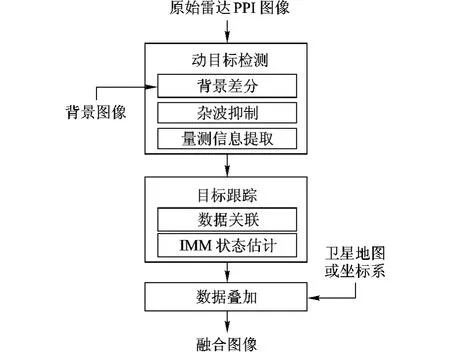
图3 低空目标检测与跟踪算法流程图
2.1 基于空域特性的杂波抑制
由于背景中的大部分物体(草地、树林、建筑物等)是非刚性的,因此其边缘回波具有一定的随机特性,经过背景差分的雷达图像中,除动目标外,在原先的背景边缘仍残留了大量杂波,且其强度一般较高,给小弱动目标的检测带来一定困难.通常,为提高系统的“检测率”,传统的飞鸟目标检测算法会设定较低的阈值,同时也引入了大量杂波,通过采用优良的跟踪算法剔除杂波,最终实现对小弱目标的跟踪.但是,此种方案会给跟踪算法带来过重的负担,严重影响算法的效率,较难实现实时处理[7-8].
本文利用杂波和低空目标的空域分布特性,建立一种新的杂波抑制方法,有别于传统的全局或局部阈值分割方法.在空域中,低空空域目标一般出现在相对独立的空间内,其邻域没有背景信息;杂波则分布在背景边缘,空域分布特征明显,即使其灰度值强于目标,仍然可与目标相区别.因此,提出一种基于空域分布特性的低空目标检测方法,采用的目标检测窗口如图4所示.由式(1)计算Nout×Nout和Nin×Nin之间的阴影区域的像素平均灰度值D(i,j,k)表示第k帧图像中待检测像素的坐标值.

其中,Mout代表外侧矩形框内的像素灰度值之和;Min代表内侧矩形框内的像素灰度值之和,分别由下式计算:

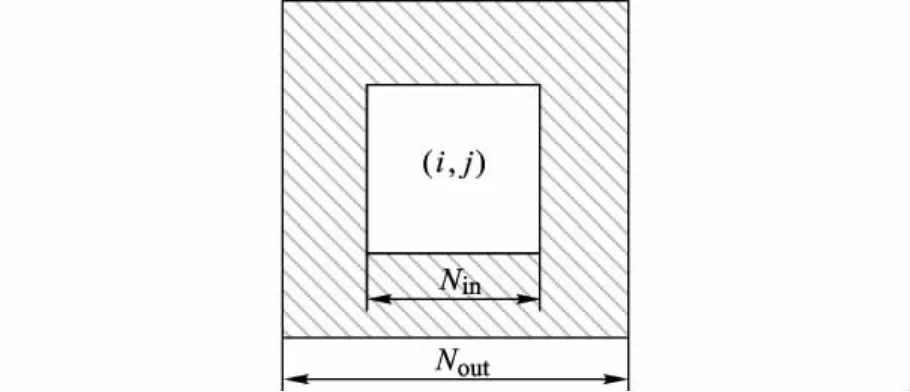
图4 目标检测窗口

式中,G(·)是原始雷达图像中像素的灰度值.值得注意的是,并不需要对原始雷达图像中的所有目标进行检测,只需关注那些差分图像中残留的高亮像素(包括A个杂波像素和B个目标像素),其坐标值(i,j)由差分图像提供,但目标检测在原始图像中进行,并设定相应阈值S,由下式对该像素点是否属于目标进行判断

目标像素标定为1,杂波像素标定为0.在A个杂波像素中,有F个被标定为目标,称之为虚警;在B个目标像素中,有T个被标定为杂波,称之为漏警;将虚警率(PFA,Probability of False Alarms)和漏警率(PMD,Probability of Missing Detection)定义如下:

优良的杂波抑制方法应当使Pfa和Pmd同时保持在较低的水平.
2.2 基于IMM的目标跟踪
目标跟踪包括数据关联和目标状态估计,数据关联将动目标量测与目标航迹关联,排除杂波量测的干扰.本文将主要采用基于空域特性的杂波抑制方法,在动目标检测阶段就将杂波全部剔除,弱化数据关联的作用,着眼于低空目标的机动状态估计.从某种程度上说,目标状态估计是跟踪算法的关键.因为量测与航迹的关联也需要知道量测到达时刻每条航迹的状态预估值,否则量测与航迹的正确关联几乎是不可能的,精确的状态预估值,是得到正确关联的前提.
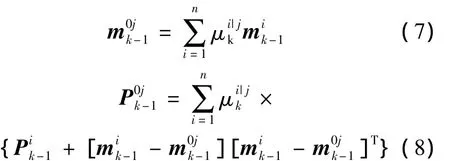
IMM方法是一种具有马尔科夫切换系数的多模型目标状态估计算法,多种模型并行工作,目标状态估计是多个滤波器交互作用的结果.IMM滤波器主要包括交互作用、滤波和组合3个部分[9].每一时刻,通过混合上一时刻所有滤波器生成的状态估计,获得某种模型配置滤波器的初始条件,并假设该特定模型就是当前时刻的正确模型.然后针对每个模型采取标准的卡尔曼滤波,最后将所有滤波器生成的更新状态估计进行加权组合,生成该时刻高斯密度状态和协方差的最终估计.权重根据每个模型的概率确定,在算法的滤波部分计算完成.下面分述 IMM的3个组成部分:

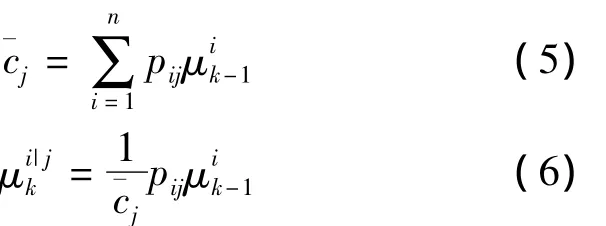

然后,计算每个滤波器的混合输入:
2)滤波.对每个模型Mi,滤波如下:

式中,标准卡尔曼滤波器的预估和更新分别用FP(·)和Fu(·)表示.除均值和协方差外,还计算了每个滤波器的测量相似性

其中,c是归一化因子.
3)组合.计算状态均值和协方差的组合估计
3 数据处理与分析
本部分首先将IMM应用于仿真跟踪模型,验证其对于多种运动模式的机动跟踪能力.然后,采用低空目标检测与跟踪算法对雷达PPI图像进行处理,并对其性能做出详细分析.
3.1 跟踪仿真模型
本节讨论运动轨迹为“丝带”型的转弯运动模型.其思想是在状态向量中加入转弯率参数ω,将其与目标速度和位置等其它系统参数一起进行估计.
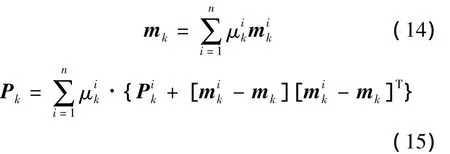
该模型132步,时间步长 Δt=0.1.目标在[-4,4]×[-4,4]的二维空间内运动如下:目标从(-3.5,-2)出发,速度为(1,0.6);4 s时,目标左转,速率为ω=1;9.3s时,目标停止转弯,以恒定速度前进,直至运动结束;轨迹如图5中实线所示.量测信息中附加了噪声,以圆点表示.IMM将标准匀速模型1和转弯模型2进行组合.匀速模型的过程噪声方差设定为q=0.01,转弯模型中的转弯速率参数设定为qω=0.15.图5中虚线为基于标准匀速模型1和基于IMM的滤波结果.经过100次蒙特卡罗实验,二者的均方误差分别为0.0267和0.016 8,IMM 方法优于单一模型的跟踪方法,在很大程度上改善了估计结果.
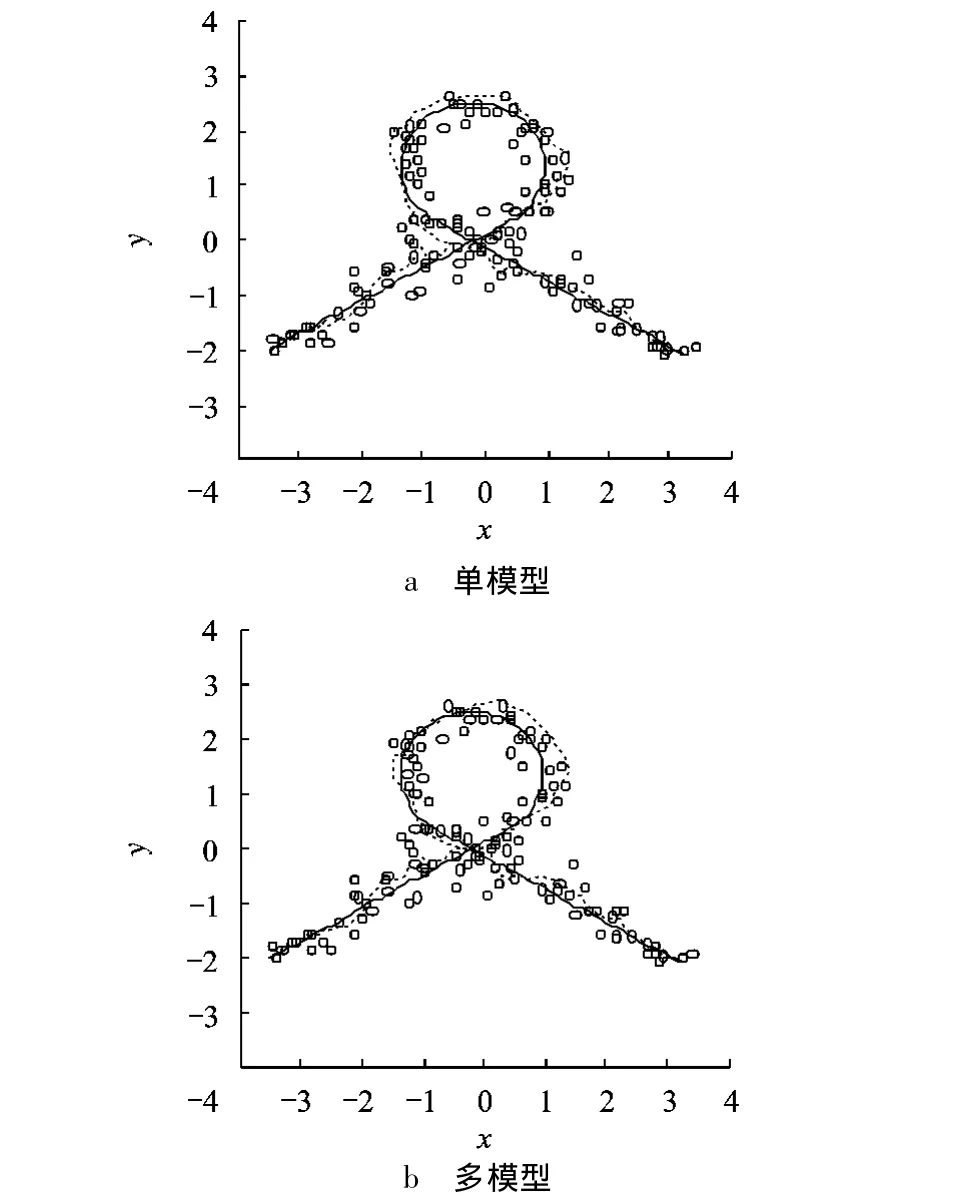
图5 “丝带”型转弯模型跟踪仿真
图6给出了IMM中模型2的概率.当真实模型为1时,模型2的估计概率约50%,其原因可以解释为转弯模型为一种普适模型,当ω=0时,匀速模型1为转弯模型2的特殊形式.图7给出了IMM获得的转弯速率参数估计.
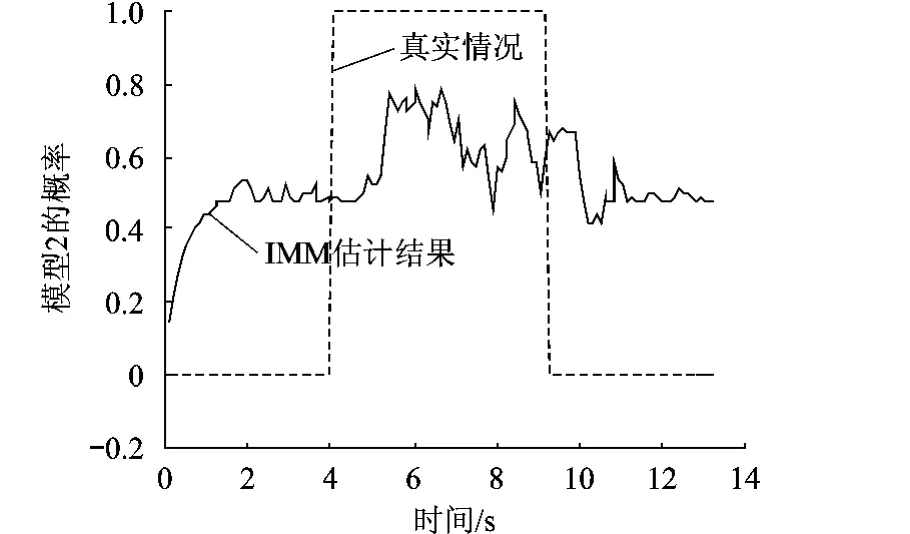
图6 模型2的估计概率
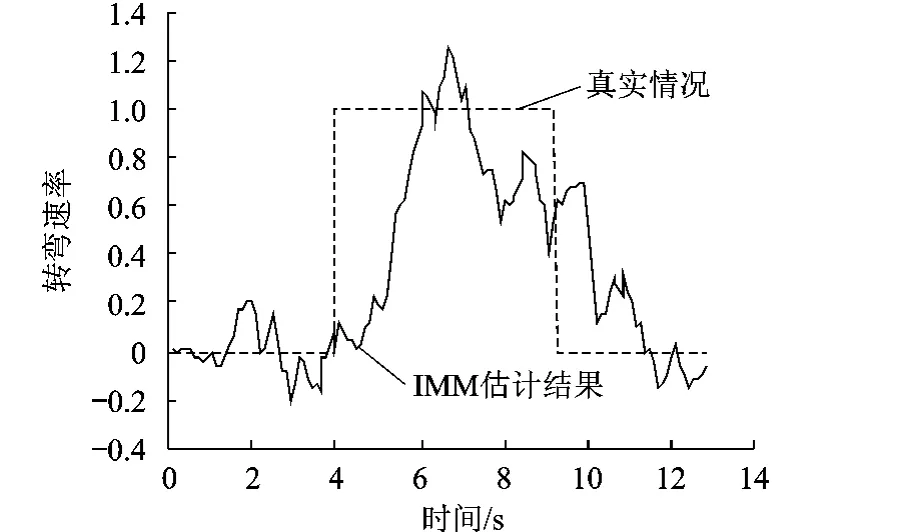
图7 角速度的估计值
3.2 雷达PPI图像处理
利用北航低空空域雷达监视实验系统于南阳机场进行了低空空域目标探测实验,本系统放置在跑道一侧的草坪上,采集了大量含有机动目标(车辆和飞行器)的雷达PPI图像,下面分别对处理结果进行分析.
图8描述了车辆目标检测与跟踪的全过程,该目标属于小弱目标,其在雷达图像中往往仅由几个像素组成,且其灰度值甚至低于部分杂波信息,很难采用传统的阈值分割方法进行检测.图8a是某图像序列中的一帧,量程为0.25 nmile,除含有车辆目标外,还包含草地、树林和建筑物等非刚性背景;经过背景差分,去除了大部分背景信息,但仍残留了大量边缘杂波,部分像素亮度甚至高于目标,实验结果如图8b所示;基于空域特性对差分图像进行杂波抑制,其目标检测窗口Nin设定为11个像素,Nout设定为21个像素,Pfa和Pmd随阈值S的变化情况如图9所示,当S分别设置为 20,40,60,80 和 100 时,Pmd始终为 0,Pfa略有增加但也不高于0.02,图8c是阈值设置为20时的杂波抑制结果,剔除了全部杂波并圈定目标;基于杂波抑制后提取的量测信息,采用IMM对动目标进行跟踪,获得的目标运动轨迹与卫星地图相叠加,获得如图8d所示的融合图像(左上角为虚框内局部放大图像),图中量测由圆点表示,目标估计位置由矩形方框标定,目标速度由一段直线表示,其长度代表了速度的大小.

图8 车辆目标检测与跟踪
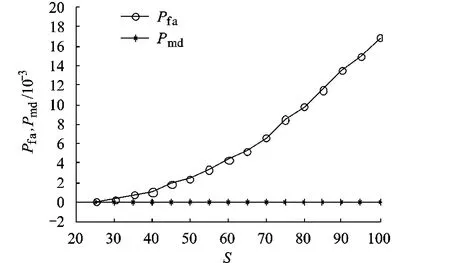
图9 Pfa和Pmd随阈值的变化情况
图10是对某飞行器着陆进行检测与跟踪的结果.图10a是一帧原始图像,数据的处理过程与图9所述相同,跟踪结果如图10b所示,飞行器目标完成了一次减速过程,每2.5s采集一帧图像并进行处理,其在14帧连续图像中的目标状态见表1,包括目标位置(X,Y)和速度(Vx,Vy),图像左下角为坐标原点,X轴水平向右,Y轴垂直向上.

图10 飞行器目标检测与跟踪

表1 飞行器目标状态估计值
4 结束语
随着低空空域的逐步开放,低空空域内的飞行活动必将出现快速增长的态势,飞行用户和飞行活动的构成日趋多样化,采用新技术构建用于支撑我国低空空域运行的服务保障体系,是提升低空空域飞行服务能力,实现我国低空空域管理改革目标的重要途径.本文提出了一种基于雷达PPI图像的低空目标检测与跟踪算法,用数据处理的方法实现了一次雷达的动目标检测与跟踪功能.传统的阈值分割方法在降低漏警率的同时会牺牲虚警率,本算法中采用的杂波抑制方法利用目标和边缘杂波的空域特性,能克服此矛盾,将二者同时保持在很低的水平;同时,采用IMM方法对目标的匀速、加速、减速、转弯等机动运动进行跟踪,实时获取目标的位置和速度等状态信息.
(References)
[1]吕茂辉,余秦勇,周琦,等.空管新技术在低空空域管理中的应用[J].通信技术,2009,42(12):95-100
Lv Maohui,Yu Qinyong,Zhou Qi,et al.Applications of new ATM technology in low altitude space management[J].Communications Technology,2009,42(12):95-100(in Chinese)
[2]Anderson R.Technical data sheet of HARRIER security radars for airspace surveillance[EB/OL].Panama City,Florida:[s.n.],2009[2010-09-30].http://www.detect-inc.com/downloads
[3]Nohara T J,Weber P,Jones G,et al.Affordable high-performance radar networks for homeland security applications[C]//IEEE Radar Conference.New York:IEEE Press,2008:1-6
[4]王春生.低空空域监视系统研究[D].北京:北京航空航天大学自动化科学与电气工程学院,2007
Wang Chunsheng.Research on Low-altitude airspace surveillance system[D].Beijing:School of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,2007(in Chinese)
[5]陈唯实,宁焕生,李敬,等.基于两种扫描方式的雷达探鸟系统[J].北京航空航天大学学报,2009,35(3):380-383
Chen Weishi,Ning Huansheng,Li Jing,et al.Avian radar system based on two scanning modes[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(3):380-383(in Chinese)
[6]陈唯实,宁焕生,刘文明,等.基于雷达图像的飞鸟目标检测与信息提取[J].系统工程与电子技术,2008,30(9):1624-1627
Chen Weishi,Ning Huansheng,Liu Wenming,et al.Flying bird targets detection and information extraction based on radar images[J].Systems Engineering and Electronics,2008,30(9):1624-1627(in Chinese)
[7]Bar-Shalom Y,Li X R,KirubarajanT.Estimationwith application to tracking and navigation:theory algorithms and software[M].New York:John Wiley & Sons,Inc,2001
[8]Li Z Z,Qi L,Li W Y,et al.Track initiation for dim small moving infrared target based on spatial-temporal hypothesis testing[J].J Infrared Milli Terahz Waves,2009,30(2):513-525
[9]Li X R,Jilkov V P.Survey of maneuvering target tracking,part V:multiple-modelmethods[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1255-1321
Security surveillance of low-altitude airspace with primary radar
Chen WeishiNing Huansheng
(School of Electronics and Information Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
An affordable low-altitude airspace experimental radar surveillance system was introduced and the target detection and tracking scheme based on plane position indicator(PPI)radar images was proposed,where clutter suppression and target state estimation are two critical techniques.After background subtraction of PPI radar images,there are still much clutter distributed around the original background objects,so its spatial characteristic was utilized for clutter suppression,and then the interactive multiple models(IMM)method was adopted for tracking of target maneuvering motions with uniform speed,acceleration,deceleration and turning.The performance of the tracking algorithm was deeply investigated against simulated data.Results of the application of overall scheme to two sets of live PPI images were also provided showing the effectiveness of the proposed approach.
low-altitude airspace;radar;detection;track;interactive multiple models
TN 95
A
1001-5965(2012)02-0143-06
2010-09-30;< class="emphasis_bold">网络出版时间:
时间:2012-02-21 11:46;
CNKI:11-2625/V.20120221.1146.001
www.cnki.net/kcms/detail/11.2625.V.20120221.1146.001.html
国家自然科学基金资助项目(61001134,61079019);第47批中国博士后科学基金资助项目;国家科技重大专项资助项目
陈唯实 (1982-),男,天津人,博士后,wishchen@buaa.edu.cn.
(编 辑:娄 嘉)
