积冰对飞机操纵性的影响与仿真
2012-06-22徐忠达曹义华
徐忠达 苏 媛 曹义华
(北京航空航天大学 航空科学与工程学院,北京100191)
飞机积冰是飞机在遭遇积冰气象条件时遇到的表面某些部位聚积冰层的现象.积冰会改变飞机的气动外形,造成飞机的阻力增大,升力减小,稳定性和操纵性恶化,严重时将导致飞行事故的发生.人们对飞机积冰的研究已经持续了近80年,但是即使在今天,飞机积冰导致的飞行事故仍然在发生.该领域早期的研究主要集中于防冰和除冰,最近30年,人们逐渐认识到不同气象条件下,积冰严重程度不同,防冰、除冰系统工作状况、效果不同,带冰飞行是不可避免的,很多关于积冰飞机飞行力学以及飞行性能的研究开始展开,并取得了很大的进展.NASA从1986年开始进行了若干基于DHC-6(双水獭)飞机的积冰飞行试验,并获得了大量有价值的试验数据[1-4];文献 [5-6]从不同的角度研究了积冰对飞机飞行力学特性的影响;文献[7]研究了积冰对自动驾驶飞机的稳定性和飞行性能的影响,对俯仰角保持模式下的积冰飞机进行了稳定性分析,并针对几种自动驾驶模式,对积冰飞机的飞行状态进行了仿真.国内在该领域的研究也取得了一定的进展,文献[8-9]分别对积冰飞机的飞行动力学特性和操稳特性进行了研究.
本文利用DHC-6飞机积冰飞行试验数据,采用飞机积冰程度参数η[5]描述积冰对飞机的影响;应用SIMULINK仿真软件建立了六自由度非线性飞机动力学模型,并引入积冰程度参数η,建立了随积冰严重程度而变化的时变飞机仿真模型;在飞机本体仿真模型基础上,设计了高度保持和滚转角保持两种自动驾驶模式的SIMULINK仿真系统.与国内外类似研究相比,本文更加全面地研究了积冰对飞机操纵性的影响.通过开环系统仿真,研究了积冰对飞机配平特性的影响,模拟了积冰过程中飞机的飞行状态,以及积冰过程中飞行员所需操纵的操纵响应;通过闭环系统仿真,分别模拟了飞机处于高度保持和滚转角保持两种自动驾驶模式时,飞机飞行状态所受积冰过程的影响以及飞机操纵面的相应响应.
1 原理与计算方法
1.1 积冰影响模型
本文采用的积冰影响模型通过积冰程度参数η描述积冰对飞机气动参数的影响,建立积冰前后飞机气动导数的关系如下:

式中,CA为未积冰飞机的气动导数值;CA,ice为积冰后相对应的气动导数值;kCA为积冰对飞机气动导数CA的相关影响参数,其数值依赖于飞机布局形式等固有参数,与积冰条件无关,对于给定的飞机,kCA为常值,一般通过试飞获得;η为飞机积冰程度参数,取决于飞机的固有结构和积冰条件,对于给定的飞机,η代表该飞机遭遇到的积冰严重程度,其值越大,积冰后的气动导数变化越大,表明飞机积冰情况越严重.关于kCA和η的具体定义请参考文献 [5],本文不再展开阐述.
文献 [5]对积冰程度参数η与液态水含量等云层参数的关系进行了较为细致的研究,根据η随云层参数的变化曲线,积冰程度参数的变化范围大致在0~0.3之间,本文以这一范围为依据,对算例中η的数值进行选择.
1.2 积冰飞机动力学模型
本文以牛顿运动定律为理论依据,应用SIMULINK仿真软件,建立了飞机六自由度非线性模型;并在此基础上加入积冰的影响,建立了模型随积冰严重程度而变化的时变积冰飞机动力学模型.
积冰飞机的运动方程是状态向量、控制向量以及积冰程度参数的函数 (与未积冰飞机的运动方程相比,增加了η):
其中状态向量X包括速度、角速度、欧拉角以及空间位置坐标:

控制向量U包括各个控制面偏角以及发动机功率:

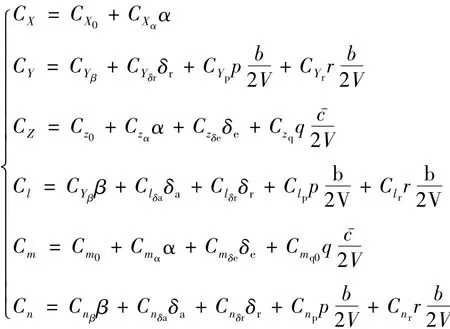
飞机的非线性常微分刚体运动方程表示如下:力平衡方程:

力矩平衡方程:
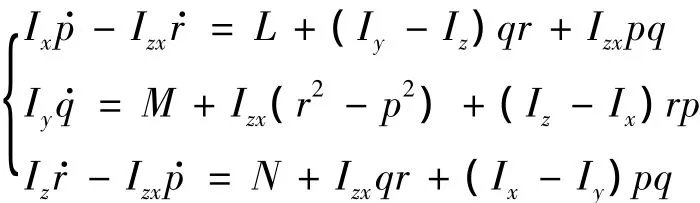
运动学方程:
位置方程:

式中Lgb为机体坐标系向地面坐标系的转换矩阵.
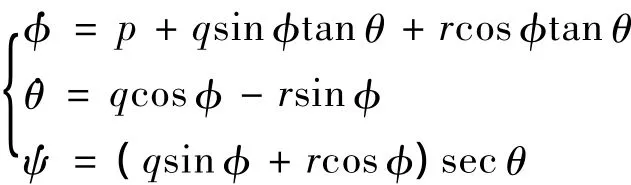
计算气动力和力矩时,由于现有气动数据的限制,采用线性方法处理气动导数和控制导数,计算如下:
η随着积冰程度的变化,按照一定的规律改变,仿真时间每推进一步,飞机的气动模型会根据这一时刻η的数值更新一次,并同时计算出这一时刻的气动力以及飞机各状态量的值,从而实现仿真模型随η而变化的时变系统的仿真.
1.3 飞机闭环仿真系统
本文在积冰飞机动力学模型的基础之上,借鉴文献 [7]中自动驾驶系统的设计,应用SIMULINK仿真软件,建立了飞机积冰情况下的自动驾驶仿真系统.
高度保持模式 (ALH,Attitude Hold)的任务是使飞机的飞行高度跟踪高度的期望值Href.其基本结构如图1所示.
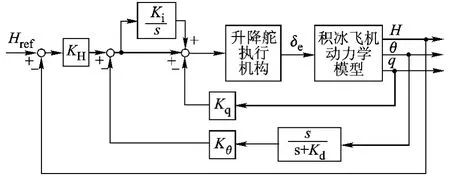
图1 高度保持模式基本结构
滚转角保持模式 (RAH,Roll Altitude Hold)的主要任务是通过对副翼的控制使飞机的滚转角跟踪期望值φref.其基本结构如图2所示.
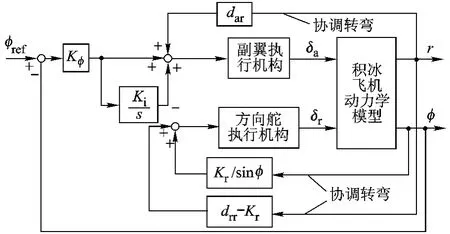
图2 滚转角保持模式基本结构
2 仿真模型及其验证
本文选择DHC-6飞机作为算例模型.为验证仿真采用的六自由度非线性模型,本文将仿真结果与飞行试验数据[4]进行了对比.
飞行试验条件为:DHC-6飞机,未积冰,襟翼偏角0°,初始飞行速度52.1 m/s,初始飞行高度1714m;在飞行试验过程中操纵动作为“升降舵倍脉冲”(如图3所示).仿真采用与飞行试验相同的条件以及操纵动作,飞行高度、速度的仿真结果与飞行试验数据的对比如图4所示.
通过对比可以发现,仿真结果的变化趋势与飞行试验数据基本相同,数值上的偏差在可以接受的范围之内.二者存在一定偏差的原因主要是仿真计算没有考虑周围环境的干扰因素.这一点可以由0~4s时间段的仿真结果证明:在这一时间段中,升降舵偏角没有变化,飞行状态应保持不变;而飞行试验数据有一定的高度和速度的波动,说明存在升降舵偏角之外的气动力干扰因素.基于以上对比和对误差的分析,本文认为所采用的六自由度非线性模型可以作为分析DHC-6飞机操纵性的仿真模型.
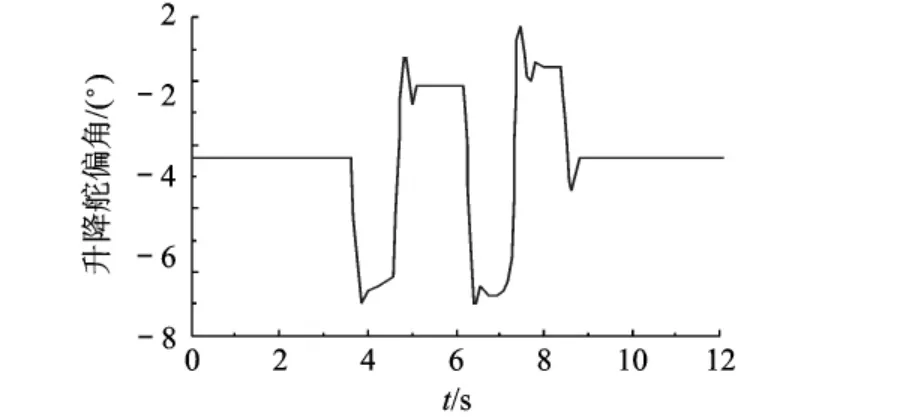
图3 升降舵输入
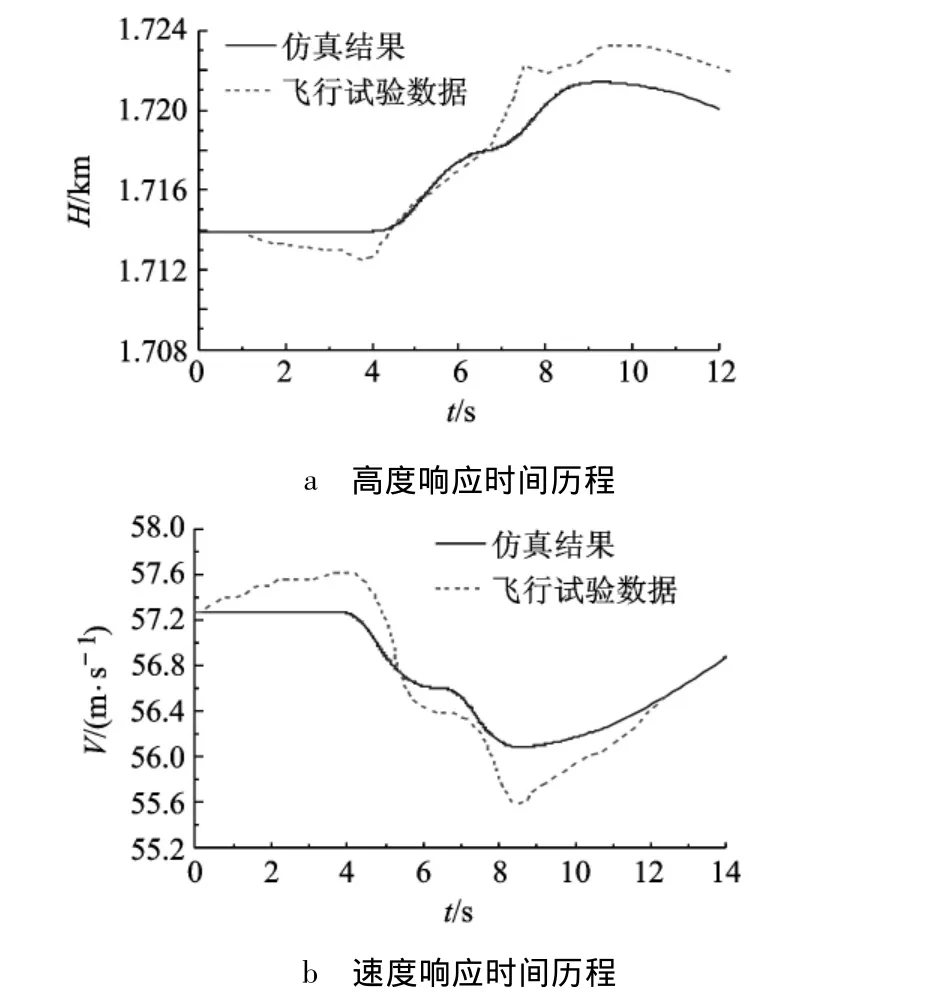
图4 仿真结果与飞行试验数据的对比
3 仿真结果及分析
3.1 开环仿真
3.1.1 积冰对飞机配平特性的影响
飞行状态为:高度3 000 m,速度45 m/s.比较未积冰飞机和4种积冰情况飞机的配平参数,如表1所示.

表1 未积冰飞机和积冰飞机的配平参数
对比发现,在相同的配平飞行状态下,由于积冰后飞机升力系数下降,升降舵操纵效率降低,飞机的配平迎角和升降舵偏角均有所增大.
仿真计算采用线性气动模型,未考虑大迎角情况以及失速等非线性因素.而在实际情况下,积冰会导致失速迎角降低,失速迎角有可能低于表1中计算得出的配平迎角,很容易导致飞机的失速,飞行危险将大大增加.
3.1.2 积冰对飞机响应特性的影响
本文仿真计算了无操纵输入情况下,积冰对飞机飞行的影响,仿真条件如表2所示.
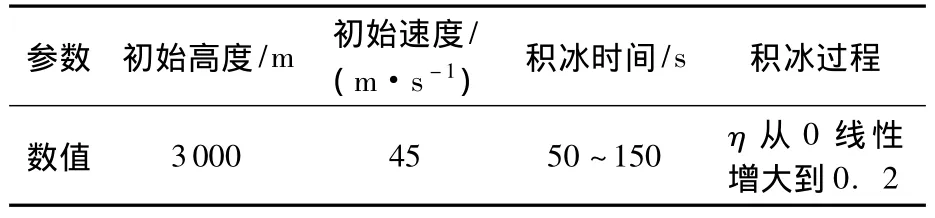
表2 开环仿真初始飞行条件及遭遇积冰情况
在无操纵输入的情况下,飞行参数的变化情况如图5所示.
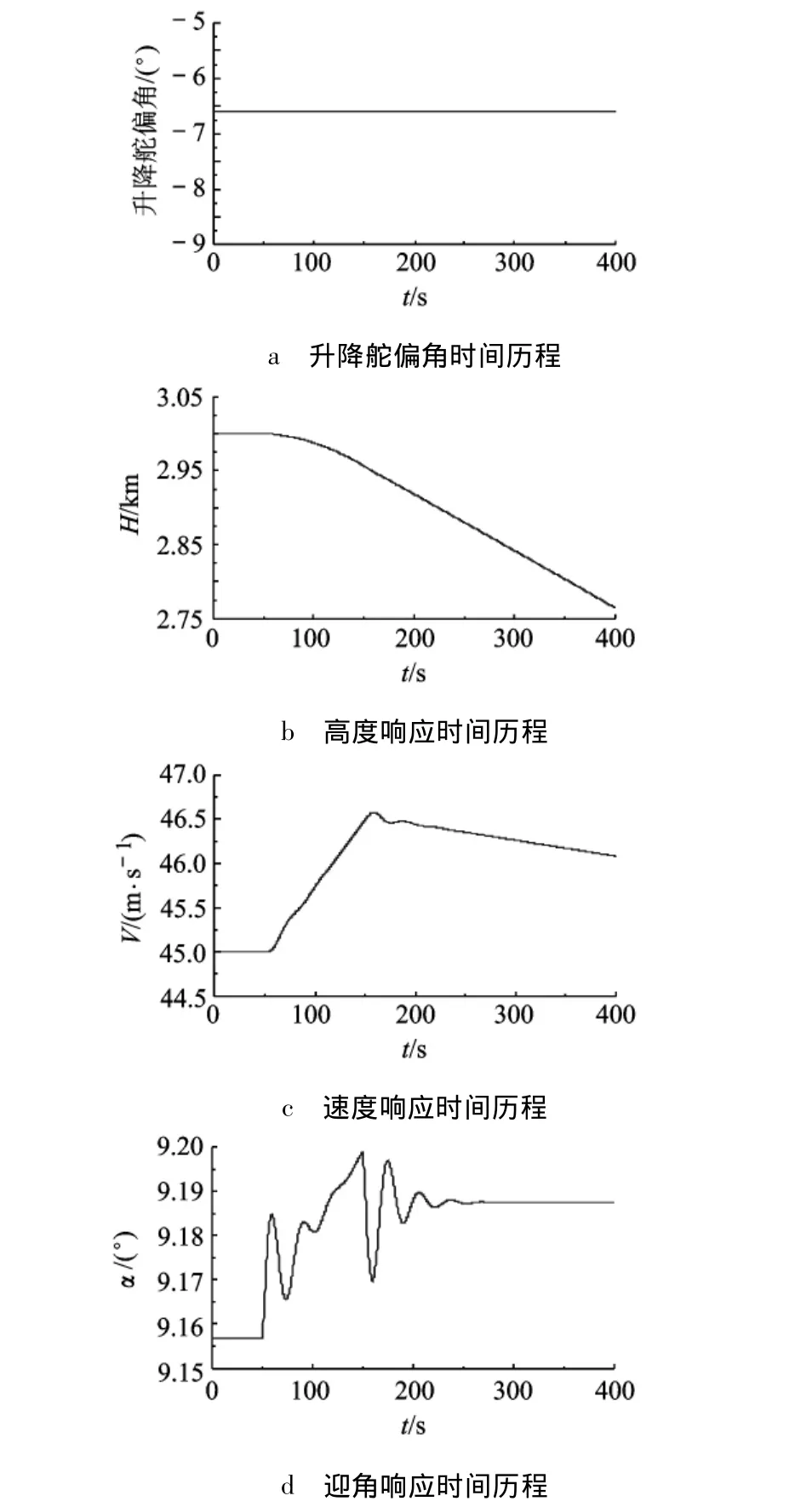
图5 无操纵输入情况下积冰飞行仿真结果
图5a为升降舵偏角,在仿真过程中保持初始状态的配平偏角不变,t=50 s时,飞机开始积冰,飞行状态发生变化,图5b~图5d分别是高度、速度和迎角的变化情况.
从仿真结果可以看出,飞机积冰后,迎角产生了较小幅值 (0.03°左右)的波动,可以认为对失速特性影响不大;但同时积冰破坏了飞机的平衡状态,飞机迅速转入俯冲,飞行高度降低很快,飞行速度增大,对正常飞行构成了威胁.
为改出俯冲状态,驾驶员需要进行拉杆操纵.仿真假设驾驶员在积冰情况发生后50 s(仿真时间t=100 s时)发现俯冲并同时进行操纵,操纵动作为升降舵-2°阶跃.这一过程的仿真结果如图6所示.
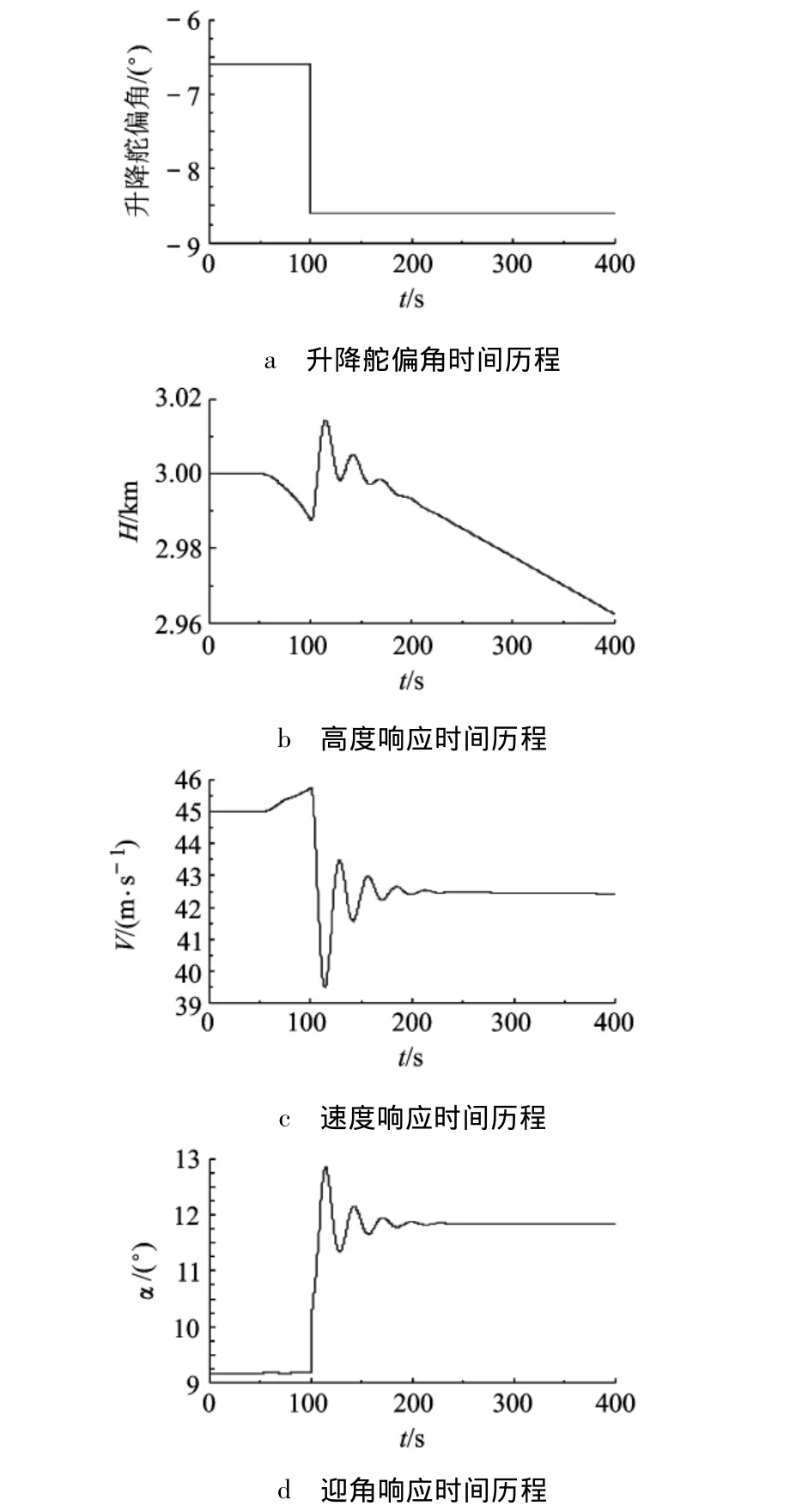
图6 有操纵输入情况下积冰飞行仿真结果
从仿真结果可以看出,俯冲趋势得到了抑制;但随着升降舵阶跃操纵的输入,飞机迎角急剧增大,峰值达到12.9°左右,同时考虑到积冰飞机失速迎角将有所减小,飞机失速的概率将会明显增大,从而很有可能导致飞行事故的发生.
综合以上两种情况下飞机响应特性的仿真结果可见,遭遇积冰情况时,飞行将面临着快速俯冲和失速的双重威胁,不仅增大了操纵飞机的难度,同时也使飞行的安全性大大降低.
3.2 闭环仿真
按照自动驾驶模式的不同仿真分为高度保持模式和滚转角保持模式,采用相同的初始飞行条件和积冰遭遇情况,如表3所示
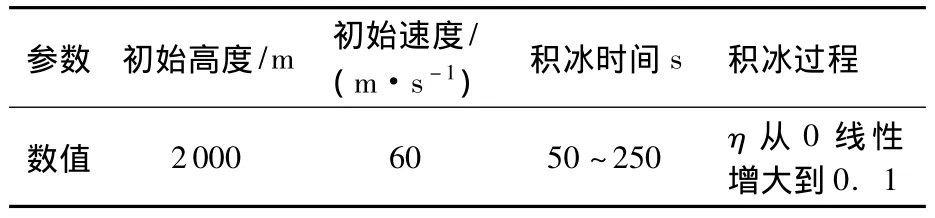
表3 闭环仿真初始飞行条件及积冰遭遇情况
3.2.1 高度保持模式 (ALH)
500~560 s,指令高度增大50 m,其余时间保持初始高度2 000 m.仿真结果对比如图7所示.
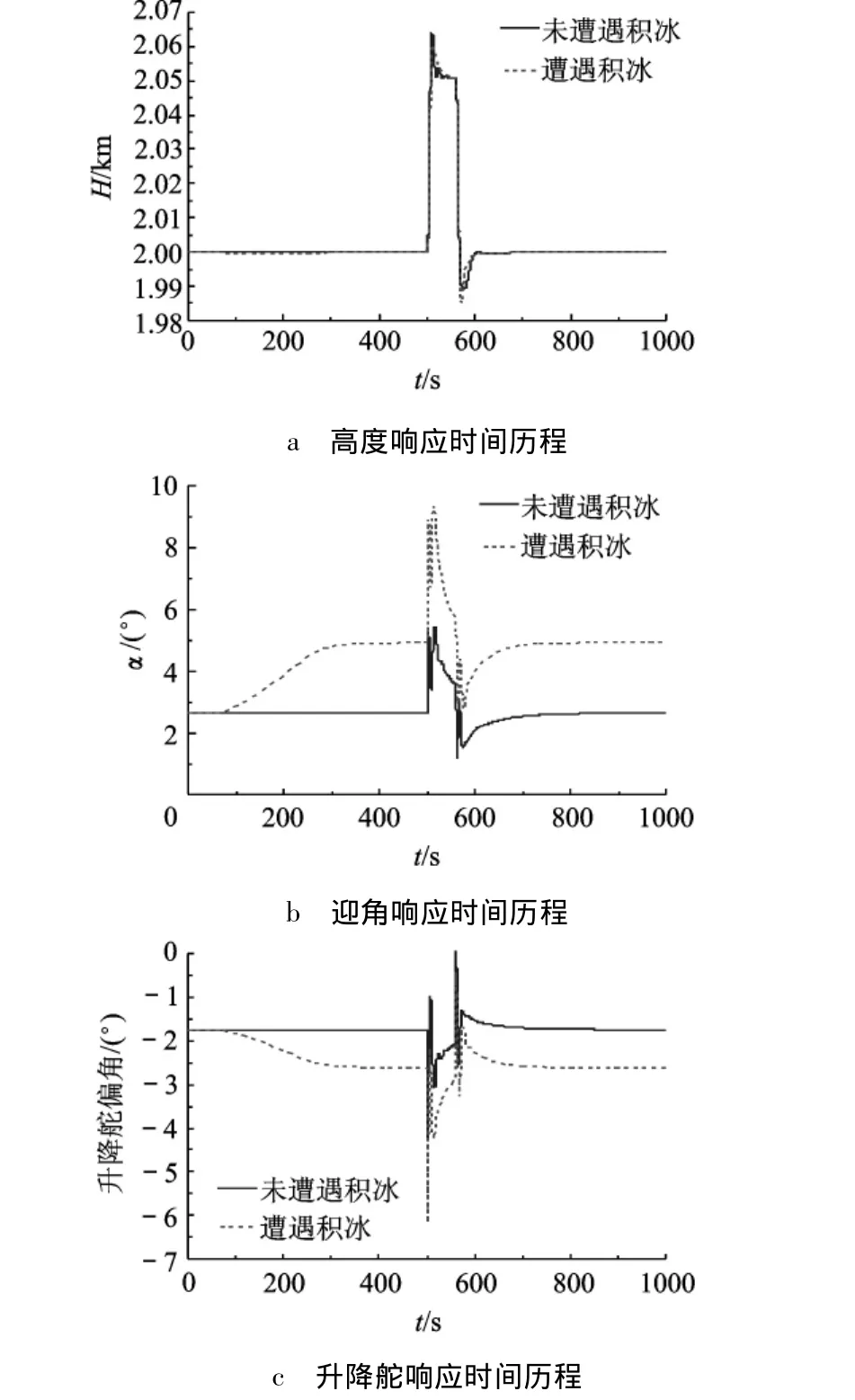
图7 高度保持模式仿真结果
通过仿真结果可以看出,未积冰情况高度指令跟随的效果较为理想,验证了ALH自动驾驶模型的正确;积冰情况下高度的波动略微增大,表明积冰在一定程度上影响了飞机指令的跟随;遭遇积冰的过程中 (50~250 s),为跟随自动驾驶指令,飞机的迎角和方向舵偏角发生了一定的改变;相同高度变化指令输入时 (500~560 s),积冰情况下的飞机迎角变化更加剧烈,迎角峰值相对于未积冰情况明显增大 (增大5°左右),预示着失速概率将明显增大;同时,升降舵偏角的峰值在积冰情况下也明显增大,表明积冰情况下更容易发生升降舵偏转饱和的情况.
3.2.2 滚转角保持模式 (RAH)
500~560 s,自动驾驶模式切换为RAH,指令滚转角保持为30°;其余时间为ALH飞行模式,保持初始高度.仿真结果如图8所示.
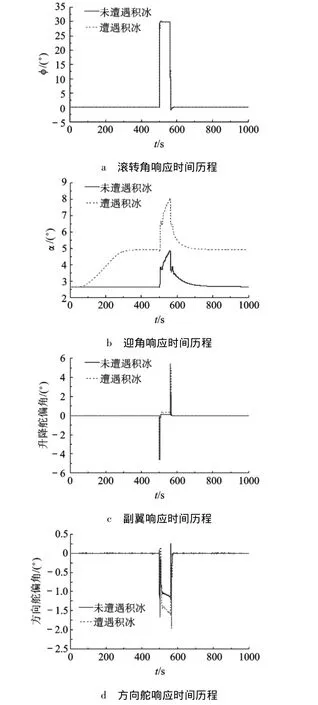
图8 滚转角保持模式仿真结果
从仿真结果可以看出,未积冰情况下滚转角跟踪情况良好,验证了RAH自动驾驶模型,积冰飞机迎角响应情况有很大的变化,尤其在滚转指令输入的阶段 (500~560 s),迎角的变化较为剧烈,并达到了较大的峰值 (略大于8°),这将导致积冰情况下飞机失速概率的增大;相对于未积冰情况,积冰情况下的方向舵偏角峰值有所增大,积冰飞机方向舵饱和的概率将会增大.
4 结论
本文利用积冰程度参数η,建立了随积冰严重程度而变化的时变飞机仿真模型;设计了飞机自动驾驶闭环仿真系统;通过仿真,研究了积冰对飞机操纵的影响,得出以下几点结论:
1)将η引入飞机模型所构成的时变仿真模型能够反映飞机积冰的过程,可以作为研究积冰对飞机操纵性影响的仿真模型.
2)相同的飞行高度和速度,积冰飞机需要更大的配平迎角和升降舵偏角;积冰情况越严重,所需要的配平迎角和升降舵偏角就越大,飞机失速的风险也越大.
3)飞机遭遇积冰情况后,将进入快速俯冲状态;改出俯冲的拉杆操纵将会导致飞机迎角大幅增大,给飞行带来失速的风险.
4)积冰对自动驾驶飞机指令跟随有一定影响,并导致飞行迎角和操纵舵面偏角的增大,不仅增大了失速发生的概率,而且可能导致操纵舵面的饱和,对飞机操纵性造成不利影响.
References)
[1]Ranuado R J,Mikkelsen K L,Mcknight R C ,et al.The measurement of aircraft performance and stability and control after flight through natural icing conditions[R].AIAA-86-9758,NASA 87265,1986
[2]Ranaudo R J,Batterson J G,Reehorst A L,et al.Determination of longitudinal aerodynamic derivatives using flight data From an icing research aircraft[R].AIAA-89-0754,1989
[3]Ratvasky T P,Ranaudo R J.Icing effects on aircraft stability and control determined from flight data[R].NASA TM 105977,AIAA 93-0398,1993
[4]Ratvasky T P,Van Zante J F.NASA/FAA tailplane icing program:flight test report[R].NASA/TP-2000-209908,2000
[5]Bragg M B,Hutchison T,Merret J,et al.Effect of ice accretion on aircraft flight dynamics[R].AIAA 2000-0360,2000
[6]Pokhariyal D,Bragg M B,Hutchison T,et al.Aircraft flight dynamics with simulated ice accretion[R].A01-16413,2001
[7]Sharma V,Voulgaris P.Effects of ice accretion on aircraft autopilot stabilityandperformance[R].AIAA-2002-0815,2002
[8]袁坤刚,曹义华.结冰对飞机飞行动力学特性影响的仿真研究[J].系统仿真学报,2007,19(9):1929-1932
Yuan Kungang,Cao Yihua.Simulation of ice effect on aircraft flight dynamics[J].Journal of System Simulation,2007,19(9):1929-1932(in Chinese)
[9]王明丰,王立新,黄成涛.积冰对飞机纵向操稳特性的量化影响[J].北京航空航天大学学报,2008,34(5):592-595
Wang Mingfeng,Wang Lixin,Huang Chengtao.Computational effects of ice accretion on aircraft longitudinal stability and control[J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(5):592-595(in Chinese)
