新型矩阵式MMC拓扑结构及控制算法研究
2012-06-21方璇李永东许烈王奎
方璇,李永东,许烈,王奎
(1.金华市电业局,浙江 金华 321000;
2.清华大学 电力系统国家重点实验室,北京100084)
1 引言
高压大容量变频调速领域中,比起矩阵变换器,基于H桥级联型的多电平变换器更具有优势,但也存在一些问题,如每个功率单元前端采用二极管不控整流,所以在电机制动时不能实现能量回馈电网,另外就是网侧必须有移相变压器接入,移相变压器的抽头多、体积大,成本也很高。为此,很多学者提出了改进的拓扑结构[1-2],随着模块化多电平(MMC)拓扑的提出,采用模块化多电平拓扑与矩阵变换器结构相结合是一种可行的方案[3-4]。它秉承了矩阵变换器和 MMC的优点,不仅可以升降压,而且还能通过增加H桥级联数,提高电压等级。然而其控制方法还不成熟,美国学者为此提出了该拓扑两电平的控制方案[5],其中心思想是采用空间矢量PWM控制,由于开关状态繁多,使得其控制变得复杂,而且也不易于扩展到多电平。本文在此基础上,将其基本拓扑进行改进,并扩展到多级H桥级联结构,提出了载波层叠PWM调制方法和悬浮电容电压平衡方案。不仅大大增加了电平数和提高电压等级,而且还简化了控制的复杂程度。最后,在Matlab中搭建了一个8级H桥级联的矩阵式MMC变换器,仿真结果证明了改进的新型矩阵式MMC拓扑结构和相应控制方案的正确性。
2 新型矩阵式MMC建模
一个8级H桥级联的新型矩阵式MMC结构如图1所示,其结构类似于矩阵变换器,输入为三相交流电源,输出为三相交流负载,不同的是,其两端均通过电感元件相连。它由9个结构完全相同的桥臂组成。每个桥臂都相当于一个受控电压源,包含8个H桥单元。本文在此基础上在每个桥臂中添加了一个滤波电感。当该拓扑结构正常运行时,每个桥臂均同时接入,参与合成交流输出。

图1 改进的矩阵式MMC拓扑Fig.1 Improved matrix MMC topology
假设输入的三相交流电压瞬时值为VA,VB,VC,输出电压瞬时值为VU,VV,VW。每个桥臂的电压瞬时值可表示为

式中:x=A,B,C;y=U,V,W。
同理,假设每相桥臂的电流分别为:iAU,iBU,iCU,iAV,iBV,iCV,iAW,iBW,iCW,输出电流分别 为iU,iV,iW,则:
由式(1)~式(4)可知,矩阵式 MMC的电压电流输入输出关系。
如图1所示,在一个开关周期内,令S为开关状态,ta为PWM信号占空比,每个H桥单元的开关状态可分为4种。
1)充电状态S=1。①Q1和Q4导通。电容正极接到X端,负极接到Y端。当电流从X流向Y端,D1和D4导通,电容充电。②Q2和Q3导通。电容正极接到Y端,负极接到X端。当电流从Y流向X,D2和D3导通,电容充电。
2)放电状态S=-1。①Q1和Q4导通。电容正极接到X端,负极接到Y端。当电流从Y流向X,Q1和Q4导通,电容放电。②Q2和Q3导通。电容正极接到Y端,负极接到X端。当电流从X流向Y端,Q2和Q3导通,电容放电。
3)PWM状态S=ta。即半充电或半放电状态。
4)旁路状态S=0。Q1和Q2同时导通,或者Q3和Q4导通,构成共发射极连接或共集电极连接的双向开关,从而令X和Y端短接,即旁路状态。见表1。

表1 悬浮电容状态Tab.1 Suspended capacitance state
由于每个H桥单元中含续流二极管,所以它没有断开状态。
3 PWM调制及悬浮电容电压平衡控制
对以上矩阵式MMC拓扑的控制包括以下2个方面:1)输入交流,合成交流输出;2)控制每个H桥单元悬浮电容电压的平衡。
PWM调制法通常可分为载波层叠法、载波移相法和空间矢量PWM(SVPWM)法等。文献[5]中采用了SVPWM法,由于矩阵式 MMC的开关状态繁多,而当级联数增加时,基本矢量和冗余开关状态的选择会变得更加复杂。而如果采用载波移相PWM,控制电容电压平衡时则需要根据每个单元的电压大小由独立的PI调节器生成不同的参考波,控制器的设计和PWM信号的生成都比较复杂[6]。
通过对矩阵式MMC拓扑的改进后,本文采用了载波同相层叠法,其原理是,针对1个x电平的变换器,采用x-1个等幅值、同频率、同相位的三角波为载波,上下连续层叠,与同一调制波进行比较,在采样时刻根据调制波与各个三角波的比较结果输出不同的电平,并决定对应开关管的开关状态[7]。图2所示为1个5电平载波层叠法的示意图。

图2 5电平调制示意图Fig.2 Five level modulation schematic
每个H桥单元都需一路独立的PWM信号。本文中,调制波是通过输入输出电压的差值给定的,即每个桥臂的电压定为调制波,见式(1)。以桥臂AU为例,假定输出电压给定为VU=m×Vmsin(ωt),则调制波为

式中:m为调制比;Vm为输出电压幅值;ω为角频率。
假设每个桥臂有n个H桥级联,且每个悬浮电容电压为UC,则-|n×UC|≤VAU≤|n×UC|。采用载波层叠的PWM调制方法,将VAU与2n个幅值为UC的三角波比较,可得到2n+1个工作模式,即2n+1个电平输出。例如,图1中每个桥臂有8个H桥级联,则每个桥臂电压满足-8UC≤Vxy≤8UC,将Vxy与16个幅值为UC的三角波比较,可以得到17电平的桥臂电压输出,同时,由式(5)也可以得到17电平的输出相电压。
而对于任意输出电平电压的输出UON,-|n×UC|≤UON≤|n×UC|,满足:

式中:SM为每个H桥单元的开关函数。
由式(6)可以看出,对于每个桥臂任意电平的输出,只要满足桥臂中每个H桥单元的开关函数之和等于要输出的电平即可。
对MMC电容电压平衡控制的基本思路是:首先,通过实时检测9个桥臂中每个H桥单元电容的电压大小和输入输出电压电流方向,来确定每个桥臂中每个H桥单元的电容充放电状态。然后,将MMC每个桥臂的H桥单元的电容电压从低到高进行排序,电容电压最高的和最低的进行电容电压平衡控制,即在一个开关周期内,使得电压最高的电容放电,电压最低的进行充电,而电压居中的几个单元进行PWM以合成输出电压。该方法牺牲了一个调制深度,而当H桥级联数越多时,其影响会越小。
设TA=VAU/UC,ta为PWM 信号的占空比,表2为当检测到桥臂的电压电流均大于0时,其中一个桥臂的8个悬浮电容电压控制方案详解。
例如,图1中,假设检测到桥臂AU输入电压瞬时值为1 000V,输出电压瞬时值为600V,并且电流从输入侧流向输出侧,每个悬浮电容电压设定值为500V。那么,如果要控制一个8级级联的矩阵式MMC悬浮电容电压平衡,首先要检测输入输出电压电流大小和方向,判断每个桥臂H桥单元的悬浮电容需要充电。然后,将每个桥臂的H桥单元电容电压从低到高排序。在一个开关周期内,选择电容电压最低的单元进行充电,即ta=1;电容电压最高的放电,即ta=-1。由于输入输出电压差为400V,VAU<UC,故选择电压次低电容进行PWM使ta等于TA,即0.8。而其余较高的5个H桥单元旁路,即使得ta=0。
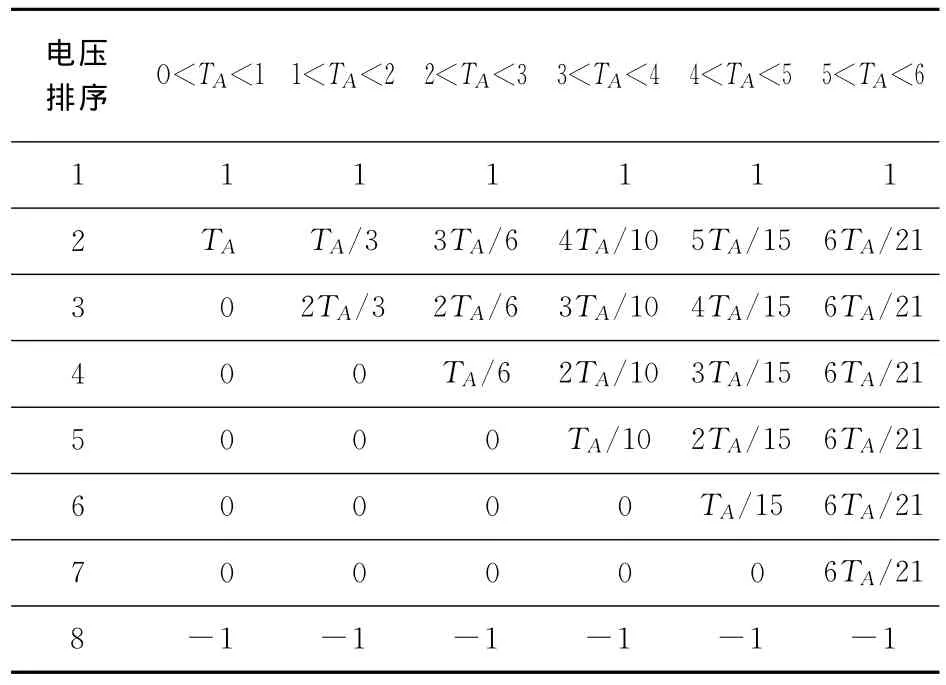
表2 悬浮电容电压控制方案Tab.2 Suspension capacitor voltages control
4 仿真及结果分析
为了验证改进后的矩阵式MMC拓扑结构以及PWM控制算法的正确性,本文在仿真软件包Matlab/Simulink平台上搭建了该拓扑结构的模型并进行了仿真。仿真参数为:输入电压U=2 000V,悬浮电容电压设定值UC=600V,输出电压给定值U0=1 000V,调制比m=0.9,基波输入频率f0=50Hz,基波输出频率f=40Hz,载波频率fs=5kHz,悬浮电容容量C=1 000μF,输入侧电感Ln=1mH,桥臂串联电感Ls=1mH,桥臂串联电阻Rs=0.5Ω,负载电阻R=10Ω,负载电感L=1mH。
图3~图7为仿真波形,其中,图3a为输入输出端电压电流波形,输入为2 000V的交流电,由上文分析,由于控制算法中牺牲了一个调制深度,故输出相电压应该为13电平的交流电,线电压为25电平。图3a的第3个波形中可以看出输出线电压为25电平,波形较平滑。图3b为其中一个桥臂的8个H桥单元悬浮电容电压的波形,由图3b中可以看出,电容电压基本保持平衡,其正向波动低于50V。图3c为图3b中8个悬浮电容电压的波形细节图,从中可以看出电压平衡控制算法的效果,每次都是电压较低的充电,电压较高的放电,电容电压居中6个单元按大小由低到高进行排序,然后依次给出相应的占空比。
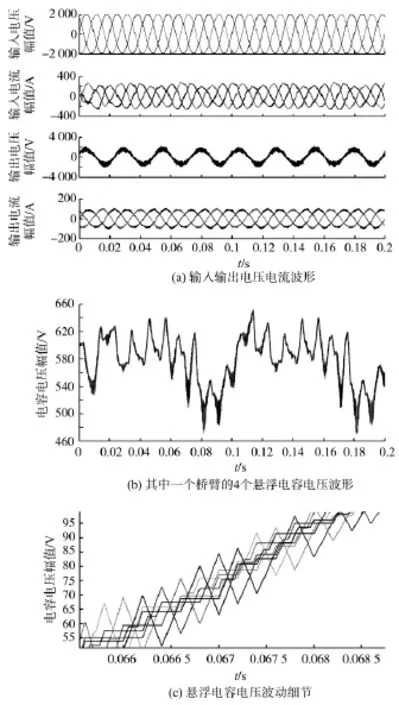
图3 仿真波形Fig.3 Simulalion waveforms
由式(5)可知,改变调制比m,将会对输出电压波形和电容电压波形产生影响,图4为当调制比m=0.4时的仿真波形图。其中,图4a分别为输入相电压、相电流波形和输出线电压、线电流波形,由图4a中可看出由于减小了调制比,输出线电压变小了,而且电平数也减少到了13电平。图4b为其中一个桥臂的8个H桥单元悬浮电容电压的波形,可以看出,悬浮电容电压正向波动也较小,基本稳定在600V附近。
图5为当输出频率f=20Hz时,输入输出电压电流波形。从图5a可以看出,频率变小对输入输出电压电流波形影响不大。图5b为其中一个桥臂的悬浮电容电压波形,可以看出,当频率减少时,悬浮电容电压波动变化也不大,基本在允许的范围内。

图4 m=0.4时的仿真波形Fig.4 Simulation waveforms when m=0.4

图5 f=20Hz时的仿真波形Fig.5 Simulation waveforms when f=20Hz

图6 fc=2kHz时的仿真波形Fig.6 Simulation waveforms when fc=2kHz
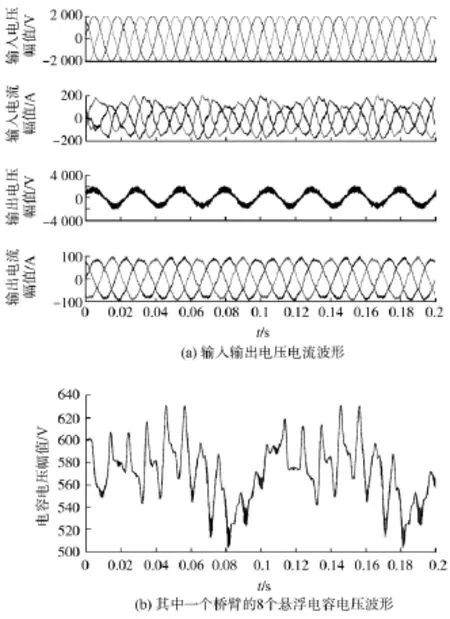
图7 fc=10kHz时的仿真波形Fig.7 Simulation waveforms when fc=10kHz
图6为当改变开关频率fc=2kHz时的波形,图6a为输入输出电压电流波形,可以看出,当开关频率降低,输入电流和输出电流波形有些畸变。图6b为其中一个桥臂的悬浮电容电压波形,可以看出,电容电压波动增大。图7为当开关频率fc=10kHz时的波形,图7a为输入输出电压电流波形,可以看出,当开关频率增加,输入输出电压电流波形较光滑,毛刺较少,但输入输出电流有些畸变。图7b为其中一个桥臂的悬浮电容电压波形,其波动幅度也有所增加。
5 结论
本文针对矩阵式模块化多电平拓扑进行了改进,并建立了其开关函数模型,提出了一种载波层叠PWM控制策略和电压平衡控制方法,仿真结果验证了控制算法的正确性和可行性。
[1]Peng Fangzheng.A Generalized Multilevel Inverter Topology with Self Voltage Balancing[J].IEEE Transactions on Industry Applications,2001,37(2):611-618.
[2]Wang Chenchen,Li Yongdong.A Survey on Topologies of Multilevel Converters and Study of Two Novel Topologies[C]∥IPEMC,2009:860-865.
[3]Martin Glinka,Rainer Marquardt.A New AC/AC Multilevel Converter Family[J].IEEE Transactions on Industrial Electronics,2005,52(3):662-669.
[4]Nabae A,Takahashi I,Akagi H.A New Neutral-point-clamped PWM Inverter[J].IEEE Trans.on Industry Applications,1981,17(5):518-523.
[5]Angkititrakul,Sitthipong,Ph D.Control and Implementation of a Multilevel Matrix Converter[Z].DAI-B 67/02,2006:84-117.
[6]李永东,王奎,郑泽东.一种级联型多电平变换器[P].中国专利:CN101505106,2009-08-12.
[7]李永东,肖曦,高跃.大容量多电平变换器—— 原理·控制·应用[M].北京:科学出版社,2005.
[8]陈阿莲,何湘宁,吴洪洋,等.基于基本单元串-并(并-串)思想生成多电平变换器拓扑的方法[J].电工技术学报,2004(2):41-46.
[9]Lesnicar A,Marquardt R.A New Modular Voltage Source Inverter Topology[C]∥EPE,2003:5.
[10]Marquardt R,Lesnicar A.New Concept for High Voltagemodular Multilevel Converter[C]∥PESC,2004:5.
