基于模糊逻辑控制的SRD仿真实现
2012-06-20周翔
周 翔
(湖南工业大学电气与信息工程学院,湖南株洲412008)
1 引言
开关型磁阻电动机调速系统(SRD)是20世纪80年代发展起来的一种新型交流调速系统。以其结构简单、运行可靠、高性能等优良特性,成为现代交流调速系统中的一支强有力的新军,应用前景十分广阔[1]。SRD作为一种新型调速系统,兼有直流传动和普通交流传动的优点,但由于SR电机的双凸极结构和采用开关性的供电电源,使得SR电机的特性和控制方式与传统电机有明显不同,尤其是非线性以及饱和现象,造成SR电机的模型难以解析,比较突出的问题是转矩脉动和噪声[2-3]。
本文采用了智能化转矩控制系统,提出了一种新型控制策略,同时利用模糊逻辑优化主开关的导通角θon和关断角θoff,以补偿位置检测环节和其它非线性因素引起的误差,实现瞬时转矩控制。整个智能化控制系统能有效减小转矩脉动和提高系统的动、静态性能,同时具有实现简单、可靠、鲁棒性好等优点。
2 SRM控制系统
本文以DSP为核心构成的SRD系统采用双闭环调速方法,如图1所示。系统有两个反馈环,即速度外环和电流内环。速度反馈信号ωr取自位置传感器输出的转子位置信号,被给定速度ωr*相减后作为速度环PI调节器的输入,而速度调节器的输出信号则作为电流指令值i*再与由霍尔传感器测到的实际相电流i值比较,形成电流偏差,以控制PWM信号的脉宽,产生PWM控制信号,控制一定频率的方波脉冲宽度,宽度被调制的方波信号加到基极驱动电路,控制功率变换器主开关器件的导通与关断,将施加到SRM绕组上的直流斩波成对应频率和占空比的方波,从而实现SRD在一定调速范围内恒转矩控制。同时利用模糊方法优化导通角θon,以补偿SR电机非线性磁特性数据建模误差和转子位置传感器的精度误差,从而进一步减小电机转矩脉动。

图1 开关磁阻电动机调速系统(SRD)框图
3 建立SR电动机仿真模型
3.1 SR电动机数学模型
SR电动机由于其双凸极结构、磁路和电路的非线性、开关性等特点,定子绕组电流和磁通波形极不规则。精确分析电动机的特性必须用非线性分析的方法,具有饱和非线性磁路的SR电动机的相电感可由傅里叶级数近似逼近[4]。
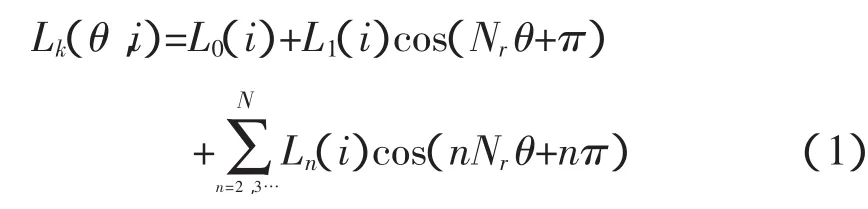
考虑到相电感的谐波分量远小于基波分量,可忽略不计,则相电感可近似表达为:

其中,L0(i)、L1(i)由式(3)确定:

Lmin、Lmax可通过实测或计算得到其随相电流变化的数据。Lmin为转子凹槽中心线与定子凸极中心线重合位置处的电感,因对应的气隙很大,铁芯不饱和,故可认为Lmin不随电流变化[5]。Lmax(i)为定转子凸极中心线重合位置处的电感,其可用多项式级数来近似表达其和相电流的函数关系,即:
SR电动机相绕组产生的电磁转矩为:

则四相SR电动机的总电磁转矩为:

3.2 基于模糊控制器优化的SR电动机仿真模型
SRD的控制参数主要有:角速度ω、绕组电流i、开关角 θon和 θoff[6]。在此 4 个参数中,ω 为设定值,绕组电流i的大小可由θon和θoff来调节。因此θon和θoff是SRD的主要控制变量。对一定的转速和转矩,θon和θoff可以有不同的组合,因而存在对θon和θoff最优选择的问题[7]。木文采取模糊控制方法来调节 θon和 θoff。
对于本系统而言,θon和θoff的控制约束条件如下:
变量取值的条件:0<θon<π/6,θon=θoff;
θon不能前移过大,因为前移越多,电流越大,当电流达到上限时,因系统的限幅斩波作用会引起转矩突降,导致系统不稳定。
本系统的模糊角度控制为二维模糊控制器,其输入为速度ω和电流i,输出为导通角变化量Δθ,模糊控制器实时对Δθ进行调整,改变的导通角θon由式(7)确定:

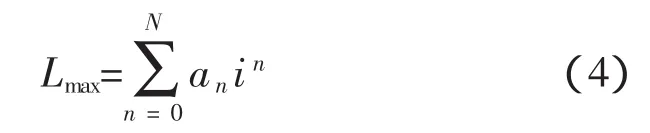
模糊控制器的各语言变量的论域为:速度ω=[0 2 1 0](rad/s),电流 I=[0 1 0](A),输出 Δθ=[0 7*π/180](rad)。输入、输出变量的模糊子集数都取为5个,为了便于实现和保证系统可靠运行,相应的隶属度函数为三角形函数[8]。根据实际运行过程和操作的经验,总结出模糊控制规则如表1所示。
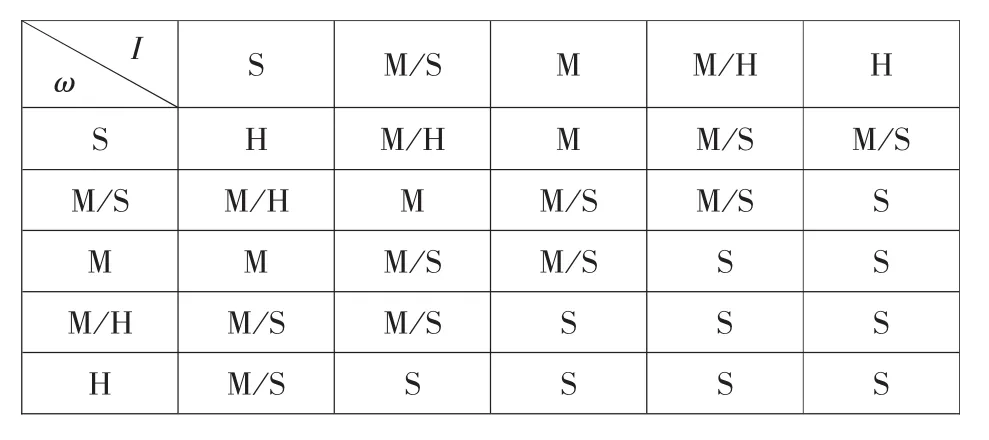
表1 关断角补偿Δθ模糊控制规则表
采用Mamdani推理法,选择模糊算子Max和Min,用重心法实现反模糊运算。经计算机在线运行得到模糊控制器输入输出关系曲面,如图2所示。

图2 模糊控制器输入输出关系曲面
4 动态仿真结果分析
通过分析上述SRM非线性数学模型及SRD系统框图,对系统进行仿真实验。系统仿真时,整个系统分解成4个模块:控制器模块、通断逻辑模块、功率变换器模块和SRM模块,其中控制器包括瞬时转矩分配、闭环磁链控制、模糊逻辑优化开关角等环节组成。
仿真时,采用一台8/6 SR电动机作为被控对象,额定转速为1500r/min,额定功率为 1500W,绕组电阻R=0.15Ω。仿真基本参数为:直流电压Us=260V,初始导通角为 5*pi/180rad,初始关断角为 24*pi/180rad,J=0.0015,F=0.0183,PWM 斩波周期为 0.6ms,电流采样周期为 0.5ms,仿真结果如图3、4所示。
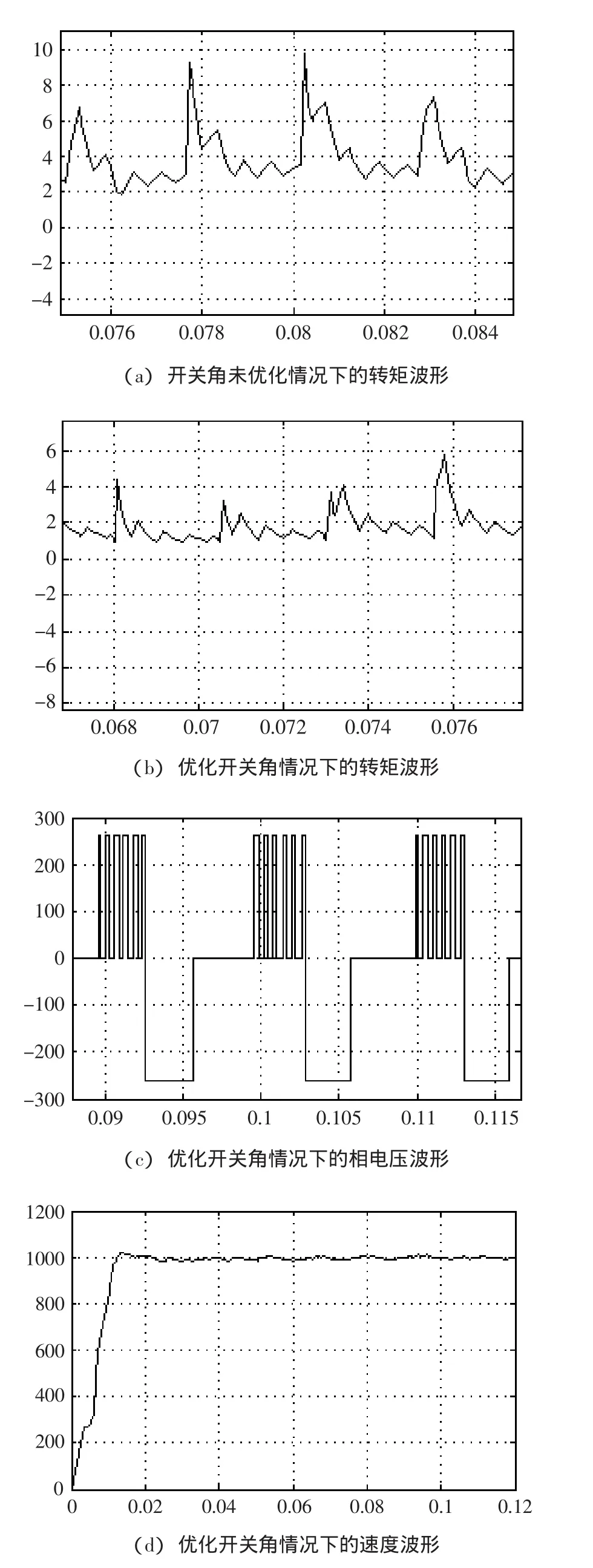
图3 给定速度 n=1000r/min,Kp=10,Ki=85 时,空载情况下系统波形图

图4 给定速度 n=1500r/min,Kp=10,Ki=85 时,优化开关角及空载情况下波形图
比较图3(a)和图 3(b),在相同速度下通过实时补偿关断角,SRD的转矩波动明显减小;比较图3(a)和图 4(b),在不同的速度下,SRD 能有较好的恒转矩输出;从图 3(d)和图 4(a)可以看出 SRD实际转速能迅速跟踪给定转速。
由仿真分析可知,实际转速始终能迅速跟踪给定转速、超调小、无静差,说明系统反应快速。基于模糊逻辑来优化SRD的导通角θon和关断角θoff能有效地抑制转矩脉动,采用的模糊控制器通过优化θon和θoff可以补偿其它非线性因素的影响。仿真结果表明,整个控制系统在保证其它动、静态性能的基础上,极大地降低了转矩脉动。
5 结论
本文在对整个SRD系统的工作原理及SRM内部电磁关系分析的基础上,在避免繁琐计算的前提下,又考虑到磁路的饱和效应,提出了SRM的一种非线性电感模型,且对其做了简化处理。同时利用模糊逻辑优化主开关的导通角θon和关断角θoff,以补偿位置检测环节和其它非线性因素引起的误差,并在此基础上建立了基于模糊逻辑控制的四相(8/6极)SRM的非线性电感特性的SRD动态仿真模型。系统仿真实验验证了该SRD仿真模型的正确性、合理性、有效性,仿真结果表明该控制方式能有效减小转矩脉动和提高系统的动、静态性能,同时具有实现简单、可靠、鲁棒性好等优点,且在实际SRD中易于实现,为研究SR电动机不同速度调节方式奠定了一定的理论基础。
[1]顾明磊,王双红,孙剑波.开关磁阻电机发电控制系统仿真研究[J].微电机,2009,(1):82-85.
[2]周素莹,林 辉.减小开关磁阻电机转矩脉动的控制策略综述[J].电气传动,2008,(3):11-17.
[3]许爱德,樊印海,李自强.空间电压矢量下SRM转矩脉动最小化[J].电机与控制学报,2010,(1):35-40.
[4]Rahman,K M,Schulz,S E.Design of high-efficiency and high-torque-density switched reluctance motor for vehicle propulsion[J].IEEE Transactions on Industry Applications,2002,138:1500-1507.
[5]F Soares,P J Costa Branco.Simulation of a 6/4 switched reluctance motor based on Matlab/Simulink environment[J].IEEE Trans,2002,37(3):989-1000.
[6]Choi C,Kim S,Kim Y,et al.A new torque control method of a switched reluctance motor using a torque-sharing function[J].IEEE Trans on Magnetics,2002,38(5):3288-3290.
[7]Natan Tzvi Shaked,Raul Rabinovici.New procedures for minimizing the torque ripple in switched reluctance motors by optimizing the phase-current profile[J].IEEE Transactions on magnetics,2005,41(3):1184-1192.
[8]N Bhiwapurkar,N Mohan.Torque ripple optimization in swit ched reluctance motor using two-phase model and optimization search technique[C].SPEEDAM 2006 International Symposium on Power Electronics,Electrical Drives,Automation and Motion.s42,2006:12-17.
