开关磁阻电机调速控制策略的仿真研究
2012-06-20乔维德
乔维德
(江苏省无锡市广播电视大学,江苏无锡214021)
1 引言
开关磁阻电机(SRM)自问世以来,以其优越于传统电机的结构、性能和经济指标,得到学术界极大的关注,并在机器人和操作机械手的关节驱动以及数控机床等领域得到了普遍应用。与其它调速系统相比,开关磁阻电机驱动系统结构简单、工作可靠、效率高、成本低,但因定、转子的双凸极结构及磁路的高度饱和,使得其磁链和转矩均为转子位置和相电流的非线性函数,因此开关磁阻电机控制系统具有严重非线性、时变性和不确定性等特点。如采用传统的基于对象模型的固定参数PID控制方式已很难取得理想的控制性能指标和控制效果。而模糊控制是目前控制工程领域应用较多的一种智能控制方法,它不依赖于控制对象和精确的数学模型,在模糊控制中,模糊控制器采用语言描述人的控制经验,形成模糊控制规则,通过模糊推理决定控制行为,是一种较好的非线性控制方法,能较好地克服开关磁阻电机控制系统中非线性、时变、耦合等影响,取得了一定的控制效果。但传统模糊控制器的变量论域是固定的,所以控制精度一般不高。为此,本文利用模糊控制动态性能和PID控制稳态性能好等优点,设计模糊-PID双模复合控制器应用于开关磁阻电机控制系统中。通过仿真实验表明,该控制器极大提高和改善了开关磁阻电机控制系统的动、静态性能。
2 双模复合控制系统的组成
模糊-PID控制的开关磁阻电机控制系统如图1所示,nr为速度给定值,n为开关磁阻电机实际转速。参数λ为模糊控制与PID控制的比例权重,它是由开关磁阻电机实际转速与给定转速的偏差来调节和控制。为了使控制系统获取较快的响应和较高的精度及稳态性能,当λ=0时,电机转速完全由模糊控制器控制,当λ=1时,完全采用PID控制;当在0<λ<1的一般情况下,PID控制和模糊控制需要共同作用。在转速偏差较大时,λ值偏小;在转速偏差较小时,λ值偏大。系统根据转速偏差大小控制调节PID控制与模糊控制的比例权重系数λ,该功能是由另外模糊控制器专门完成并实现的。

图1 双模复合控制系统结构图
3 PID控制器的设计[1]
PID控制器是过程控制系统应用最广泛的一种控制规律。在模拟控制系统中PID控制表达式为:

式中:e(t)、u(t)分别为 PID 控制器的输入量和输出量;KP、TI、TD分别为 PID 控制器的比例增益、积分时间和微分时间。

为方便计算机运算,一般采用增量形式,即:

式中:T为采用周期;u(k)为本次偏差的控制输出,u(k-1)为前一次的控制输出,e(k)、e(k-1)、e(k-2)分别为本次、前一次和前两次的偏差。
4 模糊控制器的设计
作为一种人工智能手段和方法,模糊控制将输入量按一定的模糊控制规则自动进行推理运算,比较适宜处理不确定性和不精确性问题,因而具有响应速度快、鲁棒性好等特性。模糊控制器的原理如图2所示。

图2 模糊控制器原理框图
本系统所采用的模糊控制器,其输入量为开关磁阻电机实际转速与速度给定值的偏差e和偏差变化ec,输出量为控制量u,e的模糊语言子集选取8个语言值,即 NB(负大)、NM(负中)、NS(负小)、NO(负零)、PO(正零)、PS(正小)、PM(正中)、PB(正大)。这里NO(负零)和PO(正零)区别开来,主要目的是为了提高稳态精度。ec和u的模糊子集均选取为{NB,NM,NS,ZE,PS,PM,PB},e、ec 和 u 的模糊子集对应的论域均取为 {-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},e、ec、u 的隶属度函数采用三角形函数。为增强系统的鲁棒性,提高隶属函数的分辨率,本文在零值附近的函数形状设计得更陡一些。e、ec、u论域的模糊分布函数如图3和图4所示。

图3 变量e的隶属度函数分布
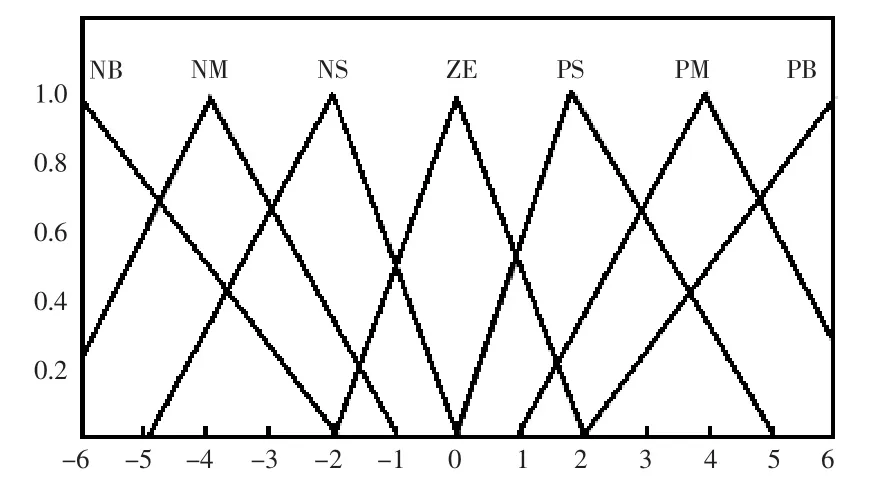
图4 变量ec和u的隶属度函数分布
模糊控制规则的建立依赖于开关磁阻电机控制系统调速的经验。本系统由于模糊控制的主要目的是控制开关磁阻电机的转速,因此控制规则取决于电机实际转速与给定转速的偏差e及其变化ec。所建立的控制规则如表1所示。如第1条模糊控制规则为:If e is NB and ec is NB then u is PB即当电机实际转速与给定转速的偏差e负大,偏差变化ec负大时,说明实际转速比给定转速大,而且还有上升的趋势,因此控制量u应为正大,用来抑制这种趋势。
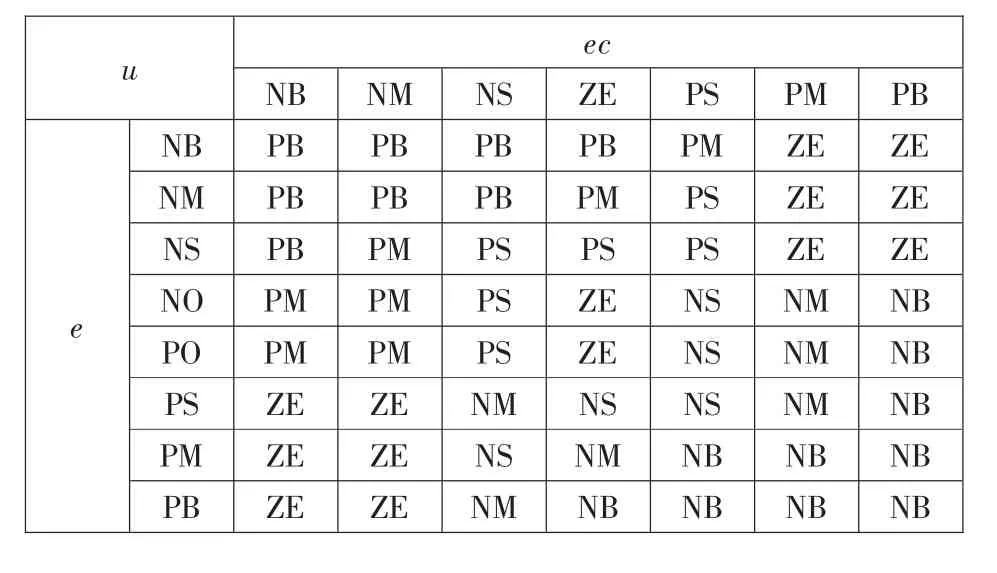
表1 模糊控制规则表
对于常规模糊控制器,需要采用Mandani推理方法,即推理时根据模糊蕴涵关系,选择模糊算子MIN和MAX,进行“极大和极小”合成运算,计算量大,而且如果模糊规则选择不当需要修改时,还必须重新进行极大与极小合成推理计算,才能得到修正后模糊控制查询表。为此将上述模糊控制规则表中的模糊子集分别赋予相应的模糊数,那么表1的模糊控制规则表就可以转换成表2所示的模糊数模型。
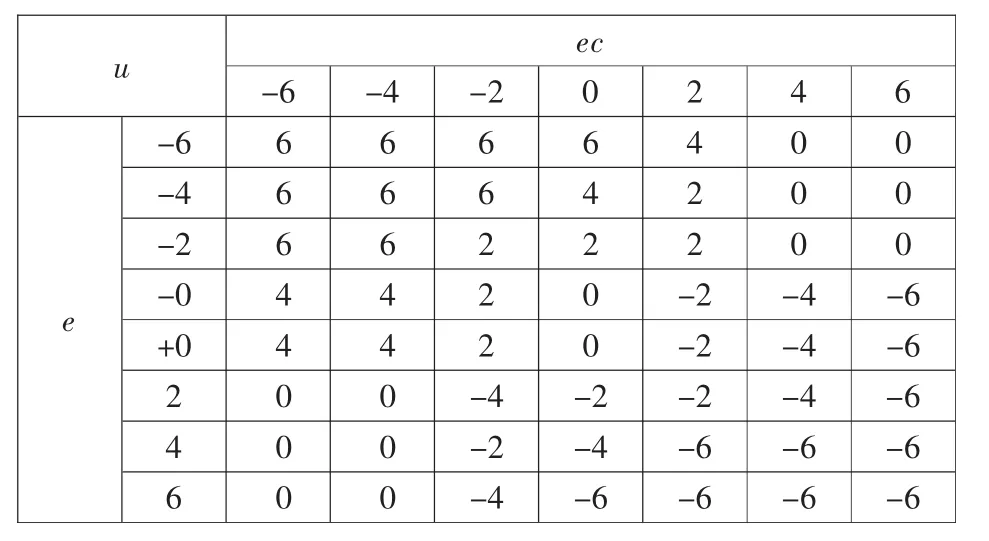
表2 模糊数模型
表2的模糊数模型相当于常规模糊控制器的模糊控制查询表,该方法比较简便,避免了繁琐的极大和极小合成运算,特别是在模糊控制过程中充分显示出较大的优势。
本系统中PID控制与模糊控制的比例权重系数λ是由一个模糊控制器专门进行控制和调节的,该模糊控制器的输入为转速偏差e,输出为λ,其模糊分布函数与模糊控制规则如图5和表3所示。

图5 调节比例权重的模糊控制器模糊分布函数

表3 比例权重的模糊控制器的模糊控制规则表
5 仿真实验及结论
为了验证所设计的模糊—PID双模复合控制器的正确性,利用计算机仿真软件Matlab对开关磁阻电机控制系统进行仿真研究,仿真用开关磁阻电机参数为:三相6/4极,额定相电流I=5A,额定转速 n=1000r/min,定子电阻 R=3.4Ω,额定转动惯量 J=0.075kg·m2。PID 控制器的三个参数取值为:KP=10,KI=0.056,KD=0.02。在给定转速下,分别使用常规PID控制、模糊控制和模糊—PID双模复合控制对开关磁阻电机控制系统进行仿真实验,三种情况下的系统速度响应仿真结果如图6所示。其中在t=3s时加入10N·m的负载扰动,从图6中可以看出,模糊—PID双模复合控制器要比常规PID控制器和模糊控制器具有更强的抗干扰能力,稳态精度高,鲁棒性好且无超调和振荡。
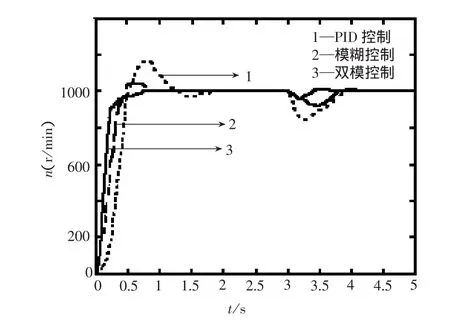
图6 控制系统速度响应曲线
6 结束语
本文针对开关磁阻电机控制系统的非线性特性,将常规PID控制器和模糊控制器结合起来构建一种模糊—PID双模复合控制器,并应用于开关磁阻电机控制系统的速度调节和控制,充分发挥模糊控制和PID控制的各自长处,取得了比较满意的控制效果。仿真实验结果表明,该双模复合控制器具有良好的动、静态性能和较强的鲁棒性,为开关磁阻电机调速系统提供了一种新的控制方法。
[1]金以慧.过程控制[M].北京:清华大学出版社,1998.
[2]李 勇,罗降福,许加柱等.基于模糊控制的直流电机PWM 调速系统[J].大电机技术,2006,(1):66-67.
[3]范文礼,胡彦奎.温度复合模糊PID控制系统与仿真[J].电气传动自动化,2008,(1):37-38.
