基于开关变压器的高压异步电动机软启动的仿真研究
2012-06-20耿大勇李亮之朱延枫
耿大勇,李亮之,魏 玲,朱延枫,王 巍
(辽宁工业大学电气工程学院,辽宁锦州121001)
1 引言
随着经济的发展,许多行业的生产规模越来越大,使用高压异步电动机(3~10kV)的数量渐增,单机容量也越来越大。电机直接全电压启动因启动电流过大对电机本身及电网会带来严重影响,故高压异步电动机的启动一直是人们所关心的一个课题,目前多采用软启动方式。近几年来,一种带有开关变压器的高压异步电动机软启动器得到广泛应用,该软启动器是用变压器来隔离高压和低压,解决了晶闸管的耐压限制问题,有广阔的应用前景[1-4]。关于开关变压器式高压异步电动机软启动器的结构设计、工作原理及应用已有文献给予阐述[1-2],但关于这种软启动控制系统数字仿真的文献较少,本文构建了基于开关变压器的高压异步电动机软启动控制系统的数学模型并进行了实例仿真及分析。最后进行了系统实验,以验证仿真方法的正确性。
2 软启动系统结构及工作状态分析
基于开关变压器的高压异步电动机软启动控制系统的电路结构框图如图1所示[3],晶闸管不是串在电机的定子回路中,而是用变压器来隔离高压和低压,变压器的高压绕组串在异步电动机的定子回路中,而低压绕组和一对反向晶闸管并联。假设开关变压器为理想的变压器,其励磁阻抗为无穷大。当晶闸管未导通时,变压器工作在空载状态,所以电网电压都降在变压器原边绕组上,电机不能启动。当晶闸管触发导通时,其导通压降可忽略,在这种情况下,加在变压器绕组两端的电压可以认为为零,则电网电压都加于电动机定子端部,基于上述的假设,则该系统的变压器仅起到理想开关的作用。启动时,通过控制系统控制晶闸管的触发角,可以连续改变低压绕组上的电压,进而改变高压绕组的电压而达到连续改变电机端电压的目的。软启动电压和电流波形示意图如图2所示。其中uA、uB和uC分别为A、B、C三相对称电源的电压,iA、iB和iC分别为电机定子的A、B、C三相电流。异步电动机为感性负载,故iA落后于uA一个φ角,图中也示出了晶闸管的触发角α和关断持续角λ。软启动运行过程,实际上是电机定子绕组以不同的电路拓扑结构接向电源的过程。如图2所示,为便于分析,将一个周期分成6个相等的间隔T1~T6。详细分析T1~T6每个间隔内各个晶闸管导通和关断的情况,将发现异步电动机在对称运行中表现出某种重复规律。根据关断持续角λ的不同,一个对称区间内将由两种不同导通情况构成。

图1 高压异步电动机软启动控制系统的电路结构
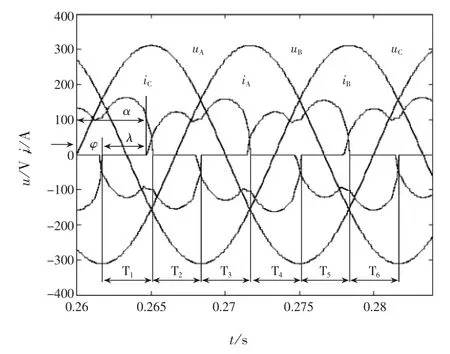
图2 软启动电压和电流波形
(1)当0≤λ≤π/3时,对称区间内由三相导通状态和两相导通状态构成。为详细分析这种情况下电机的运行规律,先具体规定电机的4种工作状态,状态①:三相电源同时导通;状态②:A相的电源关断,B、C相电源导通;状态③:B相的电源关断,A、C相电源导通;状态④:C相的电源关断,A、B相电源导通。在T1~T6的间隔内,系统将依次处于上述的②、①、④、①、③、①几种状态。
(2)当λ>π/3时,对称区间内将由两相导通状态和三相均不导通状态构成。这种情况下除了出现状态②、③、④外,还会有状态⑤:三相均不导通。这种情况下系统将依次处于②、⑤、④、⑤、③、⑤状态。
3 仿真数学模型的建立
3.1 状态方程的建立
运行状态确定后,下面建立仿真所用数学模型,本文对异步电动机动态过程的分析求解采用状态变量法进行。设定子A相与转子a相轴线之间夹角为θ,转子以机械角速度Ω逆时针旋转,则异步电动机的电压方程为:

式中:u、i、R和L分别为电机定子和转子的端电压矩阵、电流矩阵、电阻矩阵和电感矩阵。异步电动机的转矩方程为:

式中:TL、Ω、J、RΩ和 p 分别为电机的负载转矩、机械角速度、转动惯量、旋转阻力系数和极对数。
将(1)、(2)式变形,再结合得出:

则可得到以电流向量i、机械角数度Ω和转角θ为状态变量的异步电动机状态方程为:
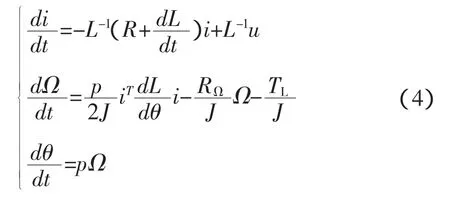
上式可简写为:

其中x为状态向量,U为输入向量,A和B为系数矩阵,分别为:

式(5)即为异步电动机状态变量法仿真数学模型的标准形式。为了便于对其求解,假定电动机的全部参数为常数,忽略磁饱和。
3.2 状态方程求解中对电动机输入电压的处理
因电动机转子短路,转子端电压可认为为零,故在对高压异步电动机软启动状态方程的求解中,关键是对于定子输入电压的处理。下面就电动机的各个工作状态进行说明。
3.2.1 状态①
当电机运行于状态①时,电机定子的各相电压即为各相电源电压。
3.2.2 状态②
状态②为电动机A相断线的情形,此时对不对称的定子输入电压的处理采用了对称分量法。据电机学理论,可以将不对称的电源电压和分解成正序、负序和零序三组对称电压,即:

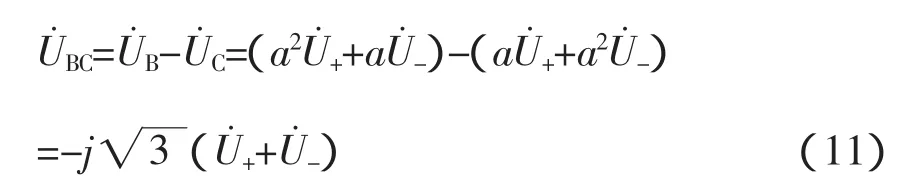
正序、负序电流分别为:
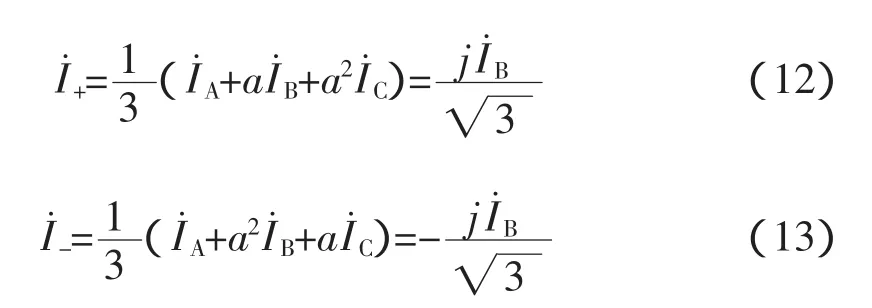
由式(12)及(13)可把电动机正序和负序等效电路反向串联,如图3所示。由式(11)求得:

图3 正序和负序等效电路反向串联的示意图

式中:Z+和Z-分别为电动机的正序和负序阻抗,由图3容易求得。图3中R1和X1σ分别为定子每相电阻和漏电抗;R2’和X2σ’分别为转子每相折算电阻和折算漏电抗;Rm和Xm分别为激磁电阻和激磁电抗。则正序、负序电压为:

将上式代入式(10)便可求出加在电机三相绕组上不对称的电源电压和另外求解状态方程时要加上强迫约束条件为和
3.2.3 状态③
状态③为电动机B相断线的情形,仿照状态②的分析过程和方法,此时有:

3.2.4 状态④
状态④为电动机C相断线的情形,同样仿照状态②的分析过程和方法,此时有
3.2.5 状态⑤
因三相均不导通,故定子输入电压和三相电流均为0。
4 软启动控制方式及仿真结果分析
对高压异步电动机软启动仿真采用电流闭环控制的斜坡恒流软启动方式,启动电流上升变化率和电流限定值都可任意设定。控制系统中的电流反馈量取自电动机相电流有效值,和限定电流的给定值作比较,经比例积分运算得到调整后的触发角去触发晶闸管导通以实现电动机按预定的规律软启动。输出的晶闸管触发角计算公式为:

式中:α为当前输出的晶闸管触发角;α0为初始给定的晶闸管触发角;kp为比例常数;ki为积分常数;Ilim为启动电流限定值;Iback为启动电流反馈值。仿真软件的程序框图如图4所示。

图4 软起动程序框图
以一台实际的高压异步电动机为例进行了仿真,电机参数如下:PN=330kW,UN=6000V,IN=40A,定子电阻 R1=1.22Ω,转子折算电 R2’=3.01Ω,铁耗等效电阻 Rm=4.72Ω,定、转子互感 Lm=0.18H,定、转子漏电感 L1σ=L2σ’=0.006H,转动惯量 J=14.5kg·m2,极对数p=2。触发角PI调节器模型中设限定电流为2倍的额定电流左右,取为80 A,积分常数ki取为0.05,比例常数kp取0.07,给定初始触发角α0为100°,电机负载率为10%额定负载。
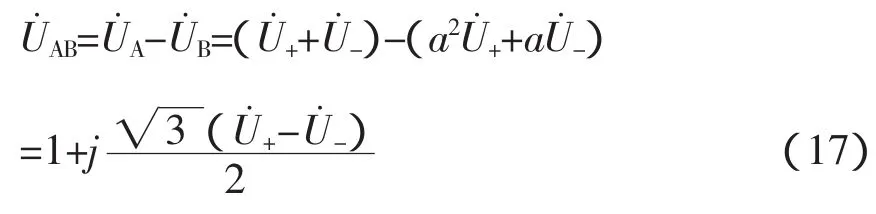
仿真结果如图5所示。其中图5(a)显示了用有效值表示的电机直接启动和软启动过程中相电流变化情况。图5(b)为软启动过程中电机相电流仿真波形。由图5可见,直接启动时瞬时冲击电流很大,而软启动时的启动电流能够限制在期望值下且接近恒流启动。启动过程平稳,不存在震荡现象。
图5 仿真结果

图6 软起动实验结果
5 实验验证及结束语
利用前面介绍的高压异步电动机软启动的控制方法对仿真用电机进行了软启动实验,实验结果如图6所示。其中图6(a)示出2倍额定电流下软启动时电流(整流并转化为电压信号)和转速的波形。图6(b)示出软启动过程电流的瞬时波形。在整个启动过程中启动电流基本维持在设定值附近,而电机转速逐渐上升,达到了预期的软启动效果。实验结果和仿真结果吻合,验证了仿真方法和控制方法的正确性和有效性。以本文建立的基于开关变压器的高压异步电动机软启动控制系统仿真模型为基础,可进一步进行其他软启动方式的建模仿真及对比优化研究,对实际高压异步电动机软启动控制系统的研制有一定的指导意义,有工程实用价值。
[1]甘世红,褚建新,顾 伟.基于限流变压器的高压异步电机软启动控制器[J].电力电子技术,2005,39(3):59-60.
[2]甘世红,褚建新,顾 伟.基于开关变压器的中压异步电动机软启动器[J].中国电机工程学报,2005,25(16):153-157.
[3]甘世红,褚建新,顾 伟.高压异步电动机软启动器的简化等效数学模型和实验[J].电工技术学报,2006,21(7):89-93.
[4]甘世红,吴燕翔,褚建新,顾 伟.高压(3-10kV)电机软启动模糊控制器[J].武汉理工大学学报(交通科学与工程版)2007,31(6):1029-1032.
[5]高景德.交流电机及其系统的分析[M].北京:清华大学出版社,1992:428-430.
[6]Gurkan Zenginobuz,Isik Cadirci,Muammer Ermis.Soft starting of large induction motors at constant current with minimized starting torque pulsation[J].IEEE Transaction On industry Applications.2001,(9):61-64.
