水位观测的不确定度计算
2012-06-12徐长春柴国武南阳水文水资源勘测局
□马 勇 □徐长春 □柴国武(南阳水文水资源勘测局)
□柴 颖(河海大学)
1.引言
当采用水尺观测水位时,其误差来源应考虑水尺零点高程测量的不定系统误差、水尺刻划的不定系统误差和水尺观读的不定系统误差三个方面。对上述三项误差因素,可以看做相互独立,水位观测综合不确定度应由水尺零点高程测量系统不确定度、水尺刻划系统不确定度和水尺观测随机不确定度三项合成。本文采用西峡水文站的一般风浪(2008年11月12日)和较大风浪(2008年11月15日)的水位观测资料(见表1、表2),进行了水位观测的不确定度计算。

表1 一般风浪情况下(2008年11月12日)的水位观测资料表
2.水位观测不确定度的计算步骤
2.1 水尺零点高程的系统不确定度的估算X"1

式中X"1—水尺零点高程不准引起的系统不确定度(mm);Sm—水准测量1km线路往返测量的标准差(mm),本站采用四等水准为10mm。
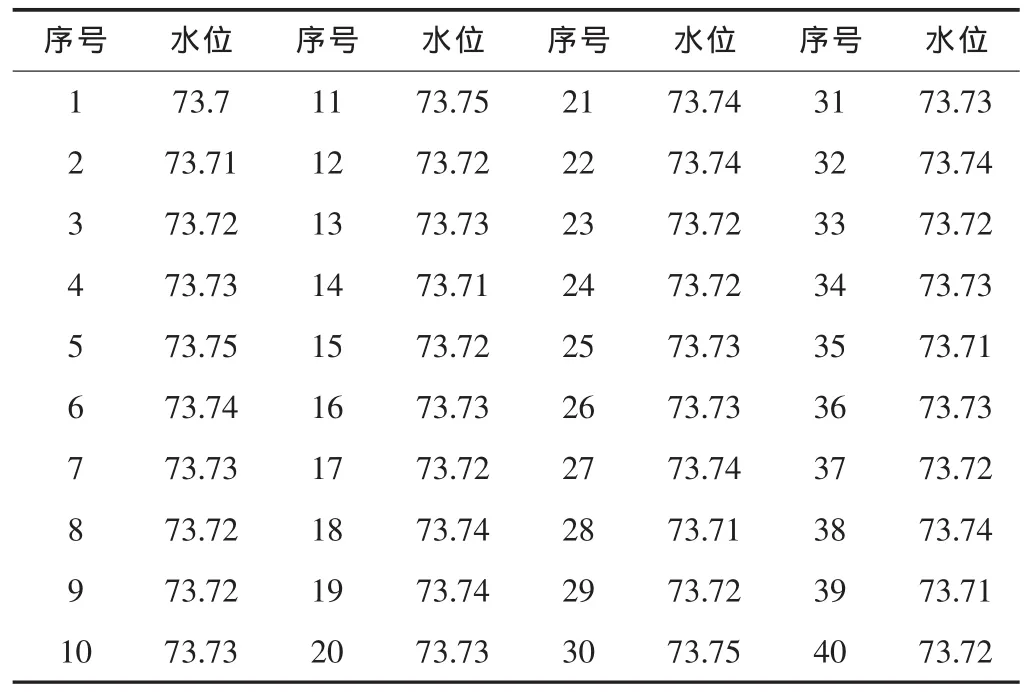
表2 较大风浪情况下(2008年11月15日)的水位观测资料表
L—往返测量或左右路线所算得之侧段、路线的平均长度(km),本站取0.2km。
2.2 水尺刻划的系统不确定度X"C的估算
水尺刻划系统不确定度可按水尺长度的1‰估算。水尺长度为1.2m,水尺刻划的系统不确定度为X"C=1.2mm。
2.3 水尺观读随机不确定度估算
本文在收集试验资料时,分一般风浪(2008年11月12日)、较大风浪(2008年11月15日)两种情况,在水位基本不变化的20min内连续观读水尺读数各40次。

式中:X'g—水尺观读随机不确定度,与Pi、P具有相同的量纲;Pi—第i次水尺读数(m);P—N次水尺读数的平均值(m);N—观测读数。
2.4 水位观测不确定度的综合
水位观测不确定度分为随机不确定度和系统不确定度。
2.4.1 随机不确定度的计算

(X'Z)95表示服从正态分布,置信水平取95%的水位观测随机不确定度。
2.4.2 系统不确定度的计算

2.4.3 综合不确定度计算

3.计算结果
按照上述计算步骤,分别计算出一般风浪和较大风浪情况下的水位观测不确定度,计算结果分别见表3和表4。水位观测的不确定度包括随机不确定度和系统不确定度。其中置信水平为95%的随机不确定度 (X'Z)95主要是指水尺观读的随机误差引起的不确定度X'g,水位观测的系统不确定度X"z主要是水尺零点高程测量的不定系统误差、水尺刻划的不定系统误差引起的不确定度即X"1和X"C。

表3 一般风浪情况下水位观测不确定度计算结果表 单位:cm
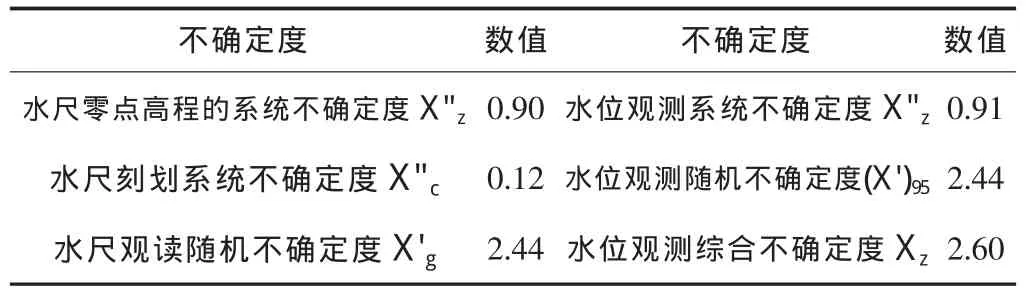
表4 较大风浪情况下水位观测不确定度的计算结果表 单位:cm
4.总结
本文分别按一般风浪、较大风浪两种情况,计算出了用水尺观测水位的综合不确定度和随机不确定度,对增加水尺观测水位的精确度和可靠性有重要意义,对水文工作者进行水位测验工作有指导意义。