基于支持向量机的MEMS陀螺仪随机漂移补偿*
2012-06-10李泽民段凤阳马佳智
李泽民,段凤阳,马佳智
(空军航空大学航空控制工程系,长春130022)
随着微电子技术和集成电路技术的发展,采用微机电系统(MEMS)技术的惯性传感器以其体积小、质量轻、成本低、产品可靠性高等优异特性,被广泛应用于汽车、航空、航天和武器制导等军民领域[1]。由于受自身结构缺陷和加工工艺的限制,MEMS陀螺仪存在较大的漂移,尤其是其中的随机漂移,具有随机性、非线性、非平稳和弱时变特性,已成为制约MEMS陀螺仪向高精度领域应用的主要因素,必须建立有效的误差模型对其进行预测和补偿[2]。
目前常用的陀螺仪随机漂移预测方法主要有两类:一类是以传统时间序列分析法为代表的统计建模方法,如将AR模型或者ARMA模型与Kalman滤波器相结合[3-4]。这类方法要求时间序列具有平稳性、正态性和独立性特征,极大的限制了模型的使用范围和预测精度。另一类是以神经网络为代表的人工智能算法[5]。神经网络具有很好的非线性逼近能力,但神经网络训练过程遵循的是经验风险最小化准则,存在着过拟合现象,导致算法的泛化性能差,并且训练过程受局部极小点的困扰。基于统计学习理论[6]的支持向量机SVM(Support Vector Machine)方法,其训练过程遵循的是结构风险最小化原则,不易发生局部最优及过拟合现象,能够很好的克服神经网络的上述缺陷,非常适合非线性的随机序列动态建模[7]。
本文通过对随机漂移序列进行相空间重构,将回归支持向量机用于陀螺仪随机漂移的预测和补偿,以探索新的更加有效的随机漂移补偿方法。
1 支持向量机预测模型
支持向量机是建立在统计学习理论的VC维理论和结构风险最小化准则的基础上,根据有限样本信息在模型的复杂度和学习能力之间寻求最佳折衷,以期望获得最好的泛化能力[8]。其基本思想是对于非线性问题,利用非线性变换将其映射到一个高维的特征空间中,并在此空间进行线性分析,即将低维空间的非线性问题转化为高维特征空间中的线性问题来解决。通常引入一个核函数以代替高维空间中的内积运算,从而巧妙的避免了复杂的计算,并且有效地克服了维数灾难和局部极值问题。
对于给定的容量为N的随机漂移样本集T={xk,yk}(k=1,2,…,N;xk∈Rn,yk∈R),其中 xk为输入变量,yk为相应的目标值。根据支持向量机的基本思想,首先通过非线性变换将输入空间映射到一个高维特征空间,在此特征空间中的SVM预测模型为:

式中,ω、b和φ(xk)分别为权值向量、阈值和进行空间映射的非线性变换。依据结构最小化准则,并考虑偏离点的影响,引入非负的松弛因子,问题转变为有约束最优问题:
对于此约束二次规划问题,依据KKT条件,通过引入非负的拉格朗日乘子α,α*,将问题转化为二次规划的对偶问题:
求解上式可得到所求的预测模型:

上式需要计算高维空间的内积,当维数很高时计算量巨大,造成所谓的维数灾难。引入核函数K(xk,x)来代替内积的计算,即

核函数接受低维的输入而计算高维的内积,可以有效的避免维数灾难。根据泛函理论,满足Mercer条件的函数都可以作为核函数。很多研究和实验表明:当缺少过程的先验知识情况下,选择径向基核函数比选择其他核函数预测性能好。在对各种常用核函数预测效果对比的基础上,本文选择了径向基核函数 K(x,xi)=exp(-‖x-xi‖2/σ2)。
2 支持向量机预测模型的建立
2.1 相空间重构
陀螺的随机漂移是一维的标量时间序列,需要通过相空间重构,把标量时间序列嵌入到一个辅助的相空间中,以得到满足支持向量机要求的训练和测试序列。
由Takens嵌入定理[9]可知:如果嵌入维的维数m≥2D2+1,D2是系统的维数,则通过相空间重构的得到的系统与原始系统是等价的。对于标量时间序列:{x(i)},i=1,2,…N,由延迟坐标相空间重构法得到的重构序列为:

其中m和τ分别为嵌入维数和延迟时间,对一个序列进行相空间重构关键是要确定这两个参数。嵌入维数m表征吸引子的空间间隔和几何不变量;延迟时间τ反映了任意两个相邻延迟坐标点的相关程度。m和τ的不恰当配对将影响重构后的相空间结构与原空间的等价关系。本文使用的C-C法是通过引入嵌入窗宽τw=(m-1)τ将m和τ统一起来的。C-C法基于大量的统计结果产生,计算量少、计算速度快,计算结果理想,并且鲁棒性能和抗噪声性能尤其突出,是最为广泛使用的计算时间窗的方法。
2.2 核函数参数和SVM参数的选择
支持向量机模型中,待确定的参数为不敏感系数ε、惩罚系数C和径向基核函数中的参数σ,这几个参数在模型的训练过程中都是定值,需要训练前事先确定。常用的方法有交叉验证法、基于VC维的误差估计和LOO误差估计[10-11]。本文使用的k-折交叉验证法,对于中等规模的问题而言,是最为可靠的参数选择方式。
统计学习理论中,通过比较算法的泛化能力来评价支持向量机的好坏,即检验模型对测试集的预测精度来衡量该模型的优劣。本文使用的误差指标为均方根误差:

即所有格点中,均方根误差最小的格点处对应的参数为所寻找的最优参数组合。
3 支持向量机预测模型的实验验证
3.1 实验方法和步骤
采集一组MEMS陀螺仪STIM202的静态数据,经过确定性误差补偿和小波阈值去噪,得到表征陀螺仪随机漂移的时间序列。当样本容量大于3 000时,C-C法寻找最优相空间重构参数的效果较好,因此取该时间序列中长度为3 500的一段序列作为实验数据。以前500个样本点为训练集训练模型,用后2 000个样本点做测试。实验步骤如下:
(1)相空间重构
首先对此标量时间序列进行相空间重构,得到符合要求的训练集和测试集。利用C-C法求解最优的嵌入维数m和延迟时间τ。得到时间窗τw=13,延迟时间τ=4,计算可得嵌入维数m=4。
(2)样本归一化
支持向量机对零均值方差为1的数值最敏感,为了减小模型训练误差,对重构后的训练集和测试集进行归一化处理:
(3)核函数参数和SVM参数的选择
使用k-折交叉验法寻找最优参数,k取5,误差评价指标为均方根误差RMSE,得到的最优参数组合为(C,σ,ε)=(0.329 88,21.112 1,0.094 6)。
(4)模型的训练和测试
利用上步得到的最优参数组合,通过SMO[12]算法训练SVM模型,并对训练得到的模型进行测试。为了说明SVM模型的有效性,还分别使用了最大Lyapunov指数法、一阶加权局域法和RBF神经网络法对重构样本做了训练和预测。
3.2 实验结果及分析
图1为最大Lyapunov指数法和一阶加权局域法的预测结果。由于这两种方法预测速度很慢,所以只用来预测了50步。从图中可以看出,但这两种方法对陀螺随机漂移的预测都不太理想。
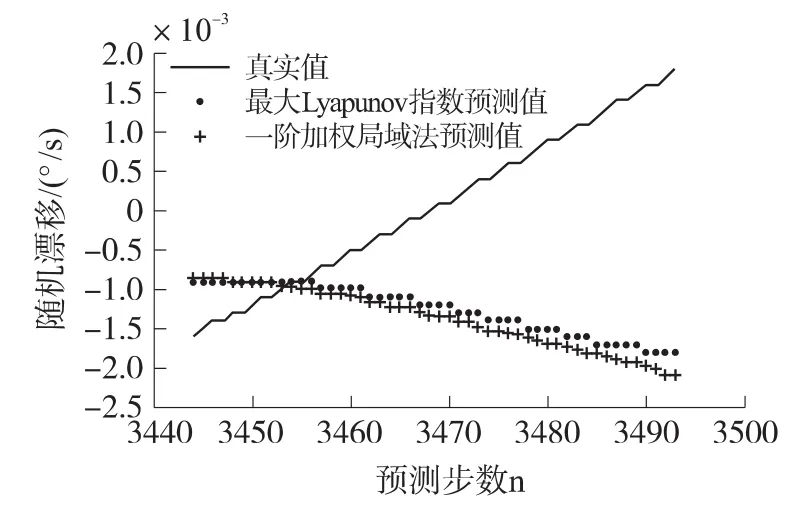
图1 最大Lyapunov指数法和一阶加权局域法的预测结果
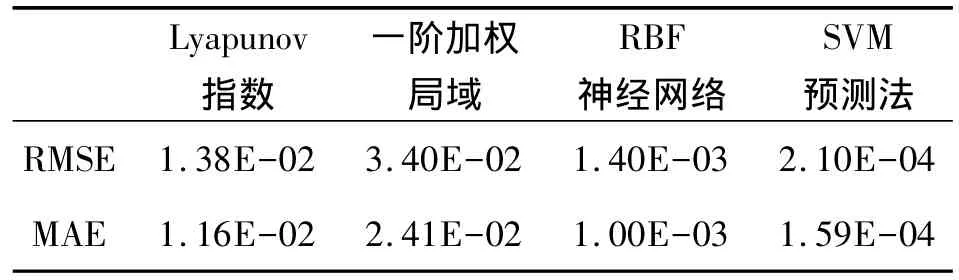
表1 几种方法对测试集的预测结果
图2和图3所示分别为RBF神经网络方法与SVM法对训练集的预测绝对误差和对测试集的预测效果,表1记录了4种方法对测试集预测的均方根误差RMSE和平均绝对误差MAE。从以上图表可得到结论:
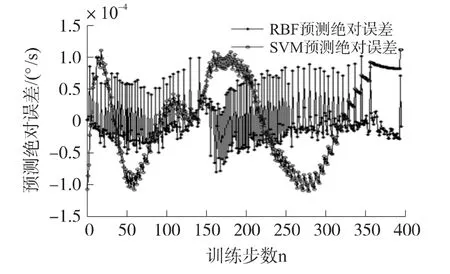
图2 RBF法和SVM法对训练集的预测绝对误差

图3 RBF法和SVM法对测试集的预测结果
(1)对于相同的训练集,RBF神经网络法和SVM法相比,具有更高的训练精度。
(2)对于相同的测试集,SVM法比RBF神经网络法的预测效果要好,能够更好的预测出陀螺随机漂移的变化趋势。
(3)SVM法的预测误差随着预测步数的增加而不断增大。
造成以上结果的原因是:RBF神经网络法是一种基于风险经验最小化准则的学习算法,它的训练过程力求对训练集做到最好的拟合,而忽视了模型结构固有的置信风险,因此预测效果受到模型自身缺陷的限制。SVM法以结构风险最小为学习准则,既兼顾训练集的拟合精度,又重视置信风险的减小,因而具有较好的泛化能力,能取得更好的预测效果。
由于陀螺随机漂移时间序列的非线性和弱时变特征,造成训练模型的预测精度随预测步数的增加而增大,训练得到的模型只能做短时预测。为了提高全程的预测精度,每隔一定时间以新加入的样本为训练集,而对于器件的同一次工作,可以保持模型的各个参数不变,重新训练预测模型。3个轴向的模型训练可以间隔进行,模型的训练耗时很少,对系统的正常工作的实时性影响不大。
4 总结
本文将基于机器学习理论的支持向量机法,用于MEMS陀螺仪随机漂移的建模和补偿。通过相空间重构将问题转换为支持向量机所需要的形式,利用最优化算法求得了相空间重构、核函数和预测模型的各项参数。仿真结果表明,该方法克服了传统方法的不足,能够很好的预测陀螺的随机漂移,可以用于实际工程中MEMS陀螺仪随机漂移的补偿。
[1]张英,戚红向.航天惯导产品及技术发展简介[J].航天标准,2010(3):40-43.
[2]陈殿生,邵志浩,雷旭升.MEMS陀螺仪随机误差滤波[J].北京航空航天大学学报,2009,35(2):246-250.
[3]方静,尚捷,顾启泰.光纤陀螺随机误差建模的实验研究[J].传感技术学报,2008,21(9):1514-1517.
[4]李杰,张文栋,刘俊.基于时间序列分析的Kalman滤波方法在MEMS陀螺仪随机漂移误差补偿中的应用研究[J].传感技术学报,2006,19(5):2215-2219.
[5]卢海曦,夏敦柱,周百令.基于遗传小波神经网络的MEMS陀螺误差建模[J].中国惯性技术学报,2008,16(2):216-219.
[6]Vapnik V N.The Nature of Statistical Learning Theory[M].New York:Springer-Verlag,1995:35-46.
[7]赵志宏,杨绍普.基于SVM的混沌时间序列分析[J].动力学与控制学报,2009,7(1):5-8.
[8]Smola A J,Schoelkopf B.A Tutorial on Support Vector Regression[J].Statistics and Computing,2004(14):199-222.
[9]吕金虎.混沌时间序列分析及其应用[M].武汉:武汉大学出版社,2002:66-71.
[10]Ito K,Nakano R.Optimizing Support Vector Regression Hyper-Parameters Based on Cross Validation[J].Proceedings of the International Joint Conference on Neural Networks,2003(7):2077-2082.
[11]王晓兰,康蕾.在线模糊最小二乘支持向量机的时间序列预测[J].计算机工程与应用,2010,46(9):215-240.
[12]Keerthi S,Shevade S K.SMO Algorithm for Least-Squares SVM Formulation[J].Neural Computation,2003,15(2):487-507.
