大温差应用环境下的MEMS陀螺零偏补偿研究*
2012-06-10马晓飞田少欣
赵 旭,苏 中,马晓飞,田少欣
(北京信息科技大学智能控制研究所,北京100101)
作为导航系统的核心器件,MEMS陀螺因重量轻、成本低、体积小、电路简单、可靠性高等优点,已广泛应用于民用车辆导航、常规战术武器、机载导航系统中。MEMS陀螺一般由单晶硅材料经光刻和刻蚀工艺制造而成,由于硅材料是一种热敏材料,温度对其弹性模量等相关物理特性影响较为显著[1]。工业现场应用环境温度变化和MEMS陀螺长时间工作自身发热现象导致其内部材料弹性模量改变,会对陀螺零偏产生较大影响[2];另外MEMS陀螺启动时间较长,通常上电后需要十几分钟才能达到稳定工作精度。由于启动时间长而很难达到武器系统作战使用的要求,零偏变化大也使其无法与加速度计等惯性器件组合成具有高精度的航姿参考系统。由此迫切需要对MEMS陀螺因启动不稳定性和全温度区间工作造成的零偏误差进行补偿,以达到工程应用的需求。
国外对MEMS陀螺温度误差补偿重点集中在通过温度试验研究陀螺自身结构参数的温度特性来改善谐振频率的温度系数[3]。国内的MEMS陀螺温度误差研究则侧重于温度误差模型的辨识及软件补偿。关于光纤和激光陀螺的温度误差研究的较多,MEMS陀螺的温度补偿研究较少。文献[4]研究了小温度范围内零偏与温度的关系,采用最小二乘法建立了补偿模型,在一定程度上提高了陀螺的精度。文献[5]采用多项式分段拟合方法对MEMS陀螺在全温区间进行分段拟合,达到较好的补偿效果,文献[6]提出了一种基于灰色模型和RBF神经网络的MEMS陀螺温度补偿方法,首先用灰色模型对数据进行预处理以减小原始数据噪声,然后用降噪后的样本数据对RBF神经网络进行训练,进一步提高了补偿效果。可见一般的补偿方法存在着:①没有考虑陀螺上电启动不稳定性造成的零偏;②非全温度区间补偿模型;③分段拟合断点选择复杂和断点处跳变;④神经网络算法复杂不容易硬件实现等问题。
本文把陀螺零偏分为两个部分,由启动不稳定性产生的零偏和稳定工作后受温度影响的零偏。采用线性回归法,在全温度区间对启动时间、温度、温度梯度、时间与温度乘积,以及温度高次项权重进行分析。通过对大量实测数据分析发现,陀螺从启动到稳定过程受到启动时间影响较大,达到稳定工作后陀螺零偏主要受到温度影响。由回归分析得出不同变量对零偏输出的系数权重,建立了MEMS陀螺全温度区间的零偏补偿模型,最后通过比较补偿结果,验证了该模型的精度和可用性。
1 温度和启动不稳定性对MEMS陀螺零偏影响分析
MEMS陀螺通常以薄硅片为材料,利用半导体加工技术制作而成。由于硅是一种热敏材料,所以当温度变化时,陀螺仪内部机械结构主要发生两种变化:尺寸大小的改变和材料弹性模量的改变。尺寸随温度的改变对陀螺的性能影响很小,而弹性模量的改变会导致系统刚度的变化,从而改变陀螺谐振频率。根据MEMS陀螺的工艺和原理可知,陀螺的谐振频率和温度的关系[7-9]如下:

式中:ωn(T)是温度为T时刻的陀螺谐振频率,m为检测质量片质量,κET为硅材料弹性模量随温度的变化系数,T0为参考温度点。
在温度T0附近的小范围内时,式(1)可以线性近似为:

由式(2)可以看出,MEMS陀螺的谐振频率ωn与温度和所用材料的弹性模量变化密切相关。因为陀螺谐振频率的漂移,对陀螺的驱动模态和检测模态都有较大的影响,从而引起陀螺的零位输出和标度因数的漂移,对陀螺的精度以及稳定性产生影响。由此可见,工业应用环境温度变化范围大和陀螺长时间工作自身产生的热量叠加,会严重影响MEMS陀螺的零偏和稳定性。
MEMS陀螺从上电启动至达到标称精度所需的时间称为启动时间。在此期间陀螺输出存在较大的漂移,即启动零偏。由图1所示,MEMS陀螺的零位输出虽然与温度存在着明显的线性关系,但是在启动时刻是复杂的非线性关系。所以,对陀螺的零偏可从两个方面考虑,即:陀螺上电启动受多种因素影响的启动零偏和达到稳定工作状态后主要受温度度影响产生的稳定零偏。

图1 MEMS陀螺内部温度与输出关系曲线
2 全温度区间零偏补偿算法研究
由以上分析,知MEMS陀螺的零偏同时受到多个变量因素影响,须通过对原始数据进行分析得到。通常采集数据的电路系统精度也会受到温箱温度的影响,为了减少电路采集系统引入不必要的误差,采用NI公司的数据采集卡设备,直接对AD公司的RS610陀螺进行原始数据采集。使用高精度温箱控制温度在-40℃,保温1 h后对MEMS陀螺上电并以200 Hz的采样率记录数据。30 min后当陀螺进入稳定工作状态,控制温箱以2℃/min的变化率升至80℃,并稳定30 min后停止数据采集。如图2所示,图2(a)为其中一只MEMS陀螺全温度区间原始的零位输出,图2(b)为滤波后的数据。
MEMS陀螺零偏在启动时刻到稳定输出之前虽受到多种因素影响,但这些影响随启动时间的增加而逐渐减小最后趋于稳定,可以使用时间对其建模。当达到稳定输出后基本只受到温度变化的影响。建立陀螺的零偏模型:

图2 MEMS陀螺原始数据与滤波后数据

当MEMS陀螺刚启动时,内部谐振还没有达到稳定,电路系统和传感器还处于预热状态。而此刻温度变化非常小,因不稳定因素对MEMS陀螺零偏影响与启动时间存在某种比例关系,可对W启动零偏建立如下模型:

式中:t为启动时间,a0为常数项,a1~a2为系数。
把MEMS陀螺放置在温箱中,调节温箱分别在-40℃、-20℃、0℃、20℃和40℃保温1 h后,采集陀螺上电至达到稳定输出后30 min数据。选取每组陀螺启动后600 s的数据对式(4)进行回归分析,最后得到回归系数如表1所示。

表1 MEMS陀螺在不同温度点启动零偏对应的回归系数
由表1可以看出MEMS陀螺在不同温度点启动零偏受时间影响的权重系数量级基本统一,证明陀螺启动时受到多种因素影响的零偏可以使用时间量对其进行拟合建模。
当MEMS陀螺经过一定的启动时间,达到标称输出精度的工作状态。此刻陀螺内部谐振稳定,电路和传感器检测系统也预热完成,可准确输出陀螺内部温度等数据。此时陀螺零偏主要会受到温度变化的影响,建立W稳定零偏跟启动时间、温度、温度梯度和温度高次项相关模型为:

式中:t为启动时间,T为陀螺内部温度,ΔT为温度变化梯度,a0为常数项,a1~a7为系数。
根据式(5)补偿模型,选取一组全温度区间的测试数据,对其进行滤波和去均值处理后进行线性回归拟合。得到各项系数如表2所示。

表2 MEMS陀螺全温度区间测试数据的拟合系数
由表2可以看出时间t2和温度T4占有的权重系数很小可以忽略,而温度T、T2和温度梯度ΔT系数权重很大,时间t和温度三次项系数次之,他们都对零偏的影响较大。经过对系数调整式(5)可以近似为:

由此可得到MEMS陀螺的全温度区间零偏补偿模型如下:

根据补偿模型式(6)和式(7)对一组全温度区间数据处理结果如图3所示。其中图3(a)是根据式(6)对一组全温度区间陀螺输出数据的零偏补偿效果图。由图3(a)上图可以看出在全温度段基本补偿了陀螺的零偏,但是由图3(a)下图局部放大可以看出在陀螺启动时刻并没有很好的补偿掉陀螺的输出零偏。图3(b)是根据式(7)对同一组数据进行补偿的效果图。由图3(b)可以看出该补偿模型不论是在全温度区间还是陀螺启动时刻都对零偏起到良好的补偿效果。
由图3和表3可以看出该全温度区间补偿模型对零偏补偿效果显著。相对于传统的多项式分段模型,全温度区间补偿模型可使补偿后的方差和零偏均减小1个数量级,相对于原始数据误差提高了将近3个数量级。

图3 不同模型对全温度区间陀螺零偏补偿及局部放大图

表3 两种模型的误差均值、方差及零偏[10-12]比较
3 实验结果分析
为了验证模型的正确性,选用同一只陀螺在同样的实验条件下,分别采集-20℃和40℃两个温度点1 h的数据,使用新型的零偏补偿模型进行零偏校正。两组不同温度段的零偏补偿效果如图4所示,零偏分别从0.740 35°/s和 1.865 38°/s下降到0.005 07°/s和 0.008 95°/s,效果显著。
考虑到MEMS陀螺重复性差的问题,把陀螺放置在40℃恒温箱中进行保温,对同一个陀螺在一天中不同的4个时段分别进行1 h的数据采集。对测试数据使用新型的零偏补偿模型进行零偏校正,结果如表4所示,根据补偿结果可以看出该模型对同一个陀螺的补偿效果具有很好的重复性。
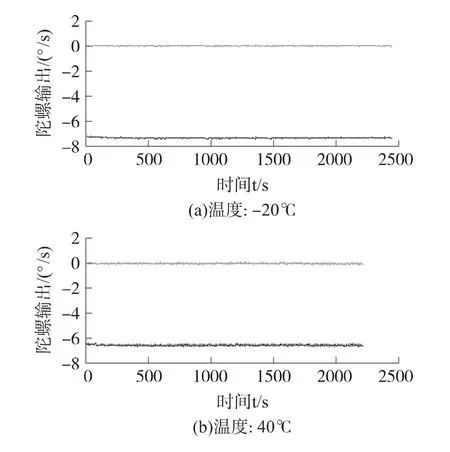
图4 新型零偏补偿模型对不同温度点的补偿效果

表4 新型零偏补偿模型对同一个陀螺的重复性试验
通过上面建模和实验分析过程可以看出该零偏补偿模型不用进行繁琐的分段区间的选取和建模,可应用于全温度区间的任何温度点,尤其是加入了对启动的零偏补偿,解决了陀螺上电至稳定工作零偏较大的难题。而且该算法最高次项仅为温度的三次项,利于硬件实时性快速补偿的实现。
4 结论
针对MEMS陀螺受启动时间和温度的影响产生的零偏,文中提出了一种同时考虑启动时间和全温度区间的线性回归补偿模型。通过图4的验证结果可以看出,该方法可在全温度区间任意温度点较好的抑制MEMS陀螺由启动不稳定性和环境及自身温度变化对零偏造成的影响,并且该算法相对简单易于编程实现,耗费硬件资源少。由此可见本文提出的全温度区间MEMS陀螺零偏补偿模型可满足一般的工业应用需求,具有实际工程价值。
[1]秦伟,苑伟政,常洪龙,等.基于模糊逻辑的MEMS陀螺零漂温度补偿技术[J].弹箭与制导学报,2011,31(6):19-22.
[2]苏中,李擎,李旷振,等.惯性技术[M].国防工业出版社,2010:38-40.
[3]Zhang Chong,Wu Qi-song,Yin Tao.A MEMS Gyroscope Readout Circuit with Temperature Compensation[J].Proceedings of the 2010 5th IEEE International Conference on Nano/Micro Engineered and Molecular Systems,2010:458-461.
[4]赵晓辉,伊国兴,王常虹.硅微陀螺温度漂移补偿研究[J].传感器与微系统,2008,27(10):48-50.
[5]程龙,王寿荣,叶甫.硅微机械振动陀螺零偏温度补偿研究[J].传感器技术学报,2008,21(3):483-485.
[6]李士心,王晓亮,翁海娜,等.基于灰色模型和RBF神经网络的MEMS陀螺温度补偿[J].中国惯性技术学报,2010,18(6):742-746.
[7]陈怀,张嵘,周斌,等.微机械陀螺仪温度特性及补偿算法研究[J].传感器技术,2004,23(10):24-26.
[8]温祖强,钱峰.微机械陀螺温度特性及其补偿算法研究[J].电子测量技术,2011,34(1):51-54.
[9]罗兵,吴美平,尹文,等.微机械陀螺温度系数的快速标定方法[J].传感技术学报,2010,23(10):1444-1448.
[10]GJB.2426A—2004,中华人民共和国国家军用标准[S].
[11]袁赣南,梁海波,何昆鹏,等.MEMS陀螺随机漂移的状态空间模型分析及应用[J].传感技术学报,2010,23(6):808-811.
[12]Fang Jiancheng,Li Jianli.Integrated Model and Compensation of the Rmal Errors of Silicon Microelectromechanical Gyroscope[C]//IEEE Transactions on Instrumentation and Measurement Society,2009,9:2923-2930.
