舰空导弹引导射击方法中的误差传递分析*
2012-06-06龙鹏林平
龙 鹏 林 平
(海军兵种指挥学院 广州 510430)
1 引言
如今区域防空导弹的射程虽然已经越来越远,但是对于低空飞行的水面舰艇雷达盲区内空中平台目标水面舰艇无法发挥射程优势进行拦阻打击,如果舰空导弹制导方式为有末端主动雷达寻的制导的复合制导,则如图1所示可以利用外在的探测平台来获取目标空中平台的参数,并将相关信息传递给武器发射舰,引导舰空导弹飞向至末制导雷达开机点,由于舰空导弹具有后期末制导主动雷达引导能力,可修正弥补前期制导带来的误差影响。这种射击方法一般在反舰作战中使用,因为水面舰艇航速较慢且机动范围为二维平面利于攻击方组织实施射击,对精度要求和数据更新速度要求也相应较低,但是应用此种方法对空中平台射击时由于空中目标具有更高的机动性,因此对误差传递带来的探测精度影响分析显得尤为重要。在本文中主要讨论采用此种射击方法由于误差传递对低空突击平台相对于空中探测平台的方位距离仰角所产生的叠加误差量,而对于其运动参数的解算由于涉及滤波算法本文暂不讨论。
蒙特卡罗方法起始于20世纪40年代,这一方法以随机变量的抽样为其主要手段,以概率理论为基础,只要影响战斗的因素能够量化,就可以用于计算机进行模拟。蒙特卡罗方法主要用于研究不确定性过程的统计实验方法,不确定性包括随机性、模拟性、灰色性、多属性等,当仿真对象存在大量的不确定因素又难以进行解析计算确定最终的概率时蒙特卡罗可以很好地进行模拟统计。
2 误差源分析
根据图1我们可以分析射击中主要的误差来源有空中探测平台和水面舰艇探测误差及对自身定位误差,信息传递、系统解算所需系统处理时间引起的延迟带来的误差。
2.1 探测误差
由于水面舰艇是根据空中探测平台的跟踪信息和自身对舰空导弹的跟踪信息形成修正指令对舰空导弹进行修正引导,跟踪信息的准确与否直接影响了火控精度,因此探测误差是一个很重要的误差源。它的大小与探测设备的精度、探测设备的工作方式、目标机动和环境对探测设备的影响有关。
对于探测方位、距离、仰角误差(ΔB,ΔD,ΔE)我们可以认为是分别服从正态分布NB(μB,σB),ND(μD,σD),NE(μE,σE)。
2.2 定位误差
因为舰空导弹和敌方空中平台定位计算需要用到水面舰艇和空中探测平台自身的定位信息,因此其定位误差也是一个重要的误差源,它直接影响到了修正引导指令的准确性。其定位误差的大小也是由其定位方式确定,如果采用GPS/GLONASS定位、劳兰C定位、罗经计程仪推算定位,则主要取决于该平台导航系统的性能;如果采用导航雷达测相对于目标跟踪平台的距离方位的定位方法,则主要取决于导航雷达的性能。由于现代水面舰艇主要进行综合导航定位我们仍旧可以认为定位纬度、经度、高度误差(ΔLat,ΔLon,ΔH)分别服从正态分布NLat(μLat,σLat),NLon(μLon,σLon),NH(μH,σH),自然水面舰艇没有高度误差。
2.3 系统处理时间
本文中系统处理时间定义为:某一时刻tstart空中探测平台获得一次敌方低空突击平台的方位距离仰角信息并依据自身定位信息解算出目标的位置及运动参数发送给水面舰艇,水面舰艇根据探测到的舰空导弹方位距离仰角信息并依据自身定位信息解算出舰空导弹的位置及运动参数并解算出修正指令发送给舰空导弹,当舰空导弹收到此次修正引导指令的时刻为tend,则tend-tstart为系统处理时间。引起时延的主要原因包括网络传输时延和数值计算时延,网络传输时延是指空中探测平台通过宽带高速数据传输系统或舰艇综合战术数据链将目标跟踪信息发送给水面舰艇,最后到达导弹武器火控台,从火控台解算出的修正指令经过网络传输到指令发射装置再到舰空导弹接受到修正指令,数据在网络传输所消耗时延;数值计算时延则主要与算法的选择及计算机本身性能有较大关系。由于要对探测或接受的数据进行处理并进行修正引导指令的解算,因此数据计算时延是客观存在的。系统处理时间可具体分段如下
1)设tstart时刻水面舰艇、空中探测平台、舰空导弹、低空突击平台坐标分别为PS0,PH0,PM0,PF0,则从水面舰艇接受到空中探测平台传送来的低空突击平台跟踪信息并提取舰空导弹的跟踪信息准备进行解算时止所消耗时间为t0,此时坐标分别变为PS1,PH1,PM1,PF1。
2)从水面舰艇开始解算修正指令到舰空导弹接受到指令时止消耗时间记为t1,则此时坐标分别变为PS2,PH2,PM2,PF2。
可以看出
3 仿真实现
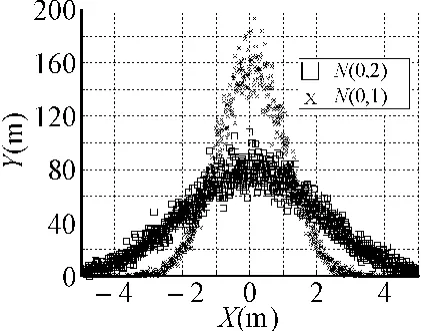
图2 随机数发生器效果图
蒙特卡罗法是用随机数来模拟误差传递中的随机因素,充分体现随机因素对误差传递的影响,是一种统计试验的定量方法。使用蒙特卡罗法对误差传递进行仿真,用随
机性的方法模拟每一环节的误差量,再按修正引导的逻辑过程把他们组合在一起进行最后误差统计,从而达到对误差传递进行分析的目的。
3.1 正态分布随机数发生器
仿真中各个误差量都是服从正态分布,因此仿真中需正态分布随机数发生器,此处采用近似法构造函数double dGaussRand(double dMean/*=0*/,double dSigma/*=1*/)产生服从N(dMean,dSigma)分布的随机数。发生器分别产生40000个服从N(0,1)和N(0,2)随机数分布如图2所示。
3.2 误差传递模型
利用蒙特卡罗法模拟舰空导弹火控台一次指令修正的流程图如图3所示。

图3 误差传递流程图
4 结果分析
仿真中各项数据参数基本设置为:水面舰艇坐标(30°,120°,0),纬度经度误差服从正态分布 NPS(30m,0.5),距离探测误差服从正态分布NDS(50m,0.5),方位探测误差服从正态分布 NBS(0.2°,0.5),仰角探测误差服从正态分布NES(0.2°,0.5);空中探测平台坐标(31°,121°,2000),纬度经度误差服从正态分布NPH(100m,0.5),高度误差服从正态分布 NHH(100m,0.5),距离探测误差服从正态分布NDH(100m,0.5),方 位探测 误差服从正态分布 NBH(0.5°,0.5),仰角探测误差服从正态分布 NEH(1°,0.5);舰空导弹位水面舰艇方位80°,距离150Km,高度2000m,航向100°,航速 VM=1200m/s,爬升角0°,低空突击平台坐标位水面舰艇方位110°,距离200Km,高度200m,航向250°,航速 VF=280m/s,爬升角0°,系统处理时间为t0=1s,t1=1s,仿真结果如表1所示。
由表1可以看出各误差量主要受tstart、tend时刻相对方位距离仰角的改变量影响,当舰空导弹和低空突击平台相距较远并且其航速较低或t0、t1较小时相对方位距离仰角误差均较小。
5 结语
本文应用蒙特卡罗方法对舰空导弹的引导射击中误差传递的影响进行模拟统计计算,仿真结果基本符合实际情况。本文只对误差传递影响低空突击平台相对于舰空导弹的方位距离仰角量与真值量之间的误差进行了模拟统计,在真实应用此种射击方法时,还需利用蒙特卡罗方法对低空突击平台和舰空导弹滤波后解算出来的运动参数误差量进行分析看是否能够达到引导要求。仿真实现的算法也可以作为核心算法在实现此种射击方法时使用。

表1 仿真结果表
[1]戴自立.现代舰艇作战系统[M].北京:国防工业出版社,1999:478-479.
[2]郑阿奇.Visual C++教程[M].北京:机械工业出版社,2004.
[3]李庆扬,王能超,易大义.数值分析[M].北京:清华大学出版社,2008,12.
[4]陈建华.舰艇作战模拟理论与实践[M].北京:国防工业出版社,2002:72-90.
[5]汪荣鑫.数理统计[M].西安:西安交通大学出版社,2008.
[6]王小非.海军作战模拟理论与实践[M].北京:国防工业出版社,2010.
[7]张鹏野.作战模拟基础[M].北京:高等教育出版社,2004,9.
[8]郭治.现代火控理论[M].北京:国防工业出版社,1996:260-262.
[9]董志荣.舰载指控系统的理论基础[M].北京:国防工业出版社,1995,8:566-568.
[10]付波,罗柱,廖家平,等.Krawtchouk矩的误差传递分析及算法改进[J].计算机与数字工程,2010,38(6).
[11]汪浩,曾家有,马良,等.美舰空导弹武器系统反导作战流程分析[J].飞航导弹,2009(7):39.
