基于谱分析的稳健自适应波束形成算法
2012-05-29李洪涛贺亚鹏朱晓华
李洪涛 贺亚鹏 朱晓华 胡 文
(1.南京理工大学电子工程与光电技术学院,江苏 南京 210094;2.南京航空航天大学信息科学与技术学院,江苏 南京 210016)
引 言
自适应波束形成可以有效地抑制干扰,但在低快拍情况下、使用数据协方差矩阵代替理想协方差矩阵或者导向矢量存在误差时,会出现期望信号相消、波束形成性能下降等稳健性问题。近年来出现了大量的针对波束形成稳健性的研究:传统的基于对角载入的波束形成算法是一种简单有效的方法[1-2],但需要正确估计对角载入的具体值;基于Krylov子空间的波束形成算法[3],收敛速度快,但其具体截断级数需要预先确定;基于子空间的波束形成算法[4-9]具有良好的性能,需要正确估计空间信号源数目;近几年提出的在理论上比较严格的稳健自适应波束形成算法[10-13],其主要思想是定义不确定集并使最差性能最优化,经证明其与对角加载类算法等效,对角载入值的准确估计仍然不可避免;基于二阶锥规划(SOCP)以及幅度约束的稳健自适应波束形成算法[14-15]的主要思想是形成平顶主瓣,对导向矢量误差具有非常优越的性能,是自适应波束形成稳健性研究最新的成果,需要主瓣宽度参数等先验信息。
针对上述问题,提出一种基于谱分析的稳健自适应波束形成(SA-RAB)算法。算法利用信号空域与频域的对称性,根据真实导向矢量与理想导向矢量之间的误差,将真实导向矢量视为“信号”,运用频谱分析(SA)技术确定主瓣宽度,运用SOCP技术在主瓣宽度内形成平顶响应,并在副瓣区域内进行自适应干扰抑制。SA-RAB算法解决了基于SOCP技术以及幅度约束的稳健自适应波束形成算法需要主瓣宽度先验信息的问题,对导向矢量误差具有非常优越的性能,是一种稳健的自适应波束形成算法。
1. 信号模型
考虑具有N个阵元且间距为d的均匀线阵,各阵元均为全向阵元,M个远场窄带非相干信号从方向(θ1,θ2, …,θM)入射到阵列,则阵列接收数据x(t)可以表示为
x(t)=As(t)+n(t)
(1)

阵列的输出为各阵元输出观测信号的加权和,加权矢量为ω=[ω1,ω2, …,ωN]T,其中ωk为第k个加权系数,则阵列的输出为
y(t)=ωHx(t)
(2)
阵列输出总功率为
E{y(t)yH(t)}=ωHRxω
(3)
式中:E{·}表示数学期望;Rx=E{x(t)xH(t)}是阵列输入信号的协方差矩阵。
2. 基于谱分析的波束形成算法
2.1 基于SOCP的稳健波束形成算法
基于SOCP的稳健波束形成器[15]为
minωHRxω

‖ω‖≤ζ0
|ωHa(θ)|≤Δθ∈[-90°,θL]∪[θU,90°]
(4)
式中: [θL,θU]为主瓣宽度;δ为主瓣纹波; Δ为阻带纹波;ζ0为波束形成稳健性约束;ωt为主瓣宽度内目标波束形成器加权向量。
式(4)是一个SOCP问题,现在有很多成熟的工具箱可解决这类问题,如利用工具箱CVX求解式(4),可以得到基于SOCP的稳健自适应波束形成算法加权矢量。
传统基于SOCP的稳健自适应波束形成算法中,参数δ,Δ,ζ0和ωt均可以通过实际应用具体确定,而主瓣宽度[θL,θU]没有具体的确定准则,如果应用基于SOCP的稳健自适应波束形成算法,则需要主瓣宽度的先验信息。若主瓣选择的太宽,就会引入额外的噪声和干扰,将影响系统输出信号干扰噪声比(SINR),若主瓣选择的太窄,期望信号位于主瓣宽度以外,系统对期望信号的增益将降低,同样会影响输出SINR.因此,主瓣宽度是影响系统输出SINR的一个重要因素。SA-RAB算法通过真实导向矢量与理想导向矢量之间的误差确定主瓣宽度范围,利用基于SOCP的稳健自适应波束形成算法进行波束形成。
2.2 本文算法

(5)
设阵列主瓣对应角度为θ0,则

(6)
式(6)两边同时乘以一个常数‖aH(θ0)‖,得

(7)
≤‖aH(θ0)‖ε0
又‖aH(θ0)‖=1,所以

(8)
根据向量范数性质,有


(9)
整理得到

(10)
由式(6)运用向量范数性质,得

(11)
整理得到

(12)

因此,求解式(13)可得主瓣宽度参数θL和θU
(13)
在确定主瓣宽度后,利用式(4)可得SA-RAB算法加权矢量。
与传统的稳健波束形成算法,当导向矢量存在误差时,由于波束指向不再与期望信号一致,导致输出SINR下降相比,SA-RAB算法通过准确确定波束主瓣宽度,使阵列对于期望信号增益始终保持最大,从而使系统在导向矢量存在误差时可以输出理想的SINR.
3. 仿真与性能分析
试验1设均匀线阵由32个全向阵元构成,阵元间距d=λ/2,期望信号方向为0°,在-22°、22°各有一个互不相干的干扰,干扰的干噪比均为50 dB,快拍数为400.
图1(a)为不同误差上界ε0对应的SA-RAB算法的方向图。从图1(a)可以看出,随着ε0的增大,SA-RAB算法方向图的主瓣宽度也随之展宽,且算法在多个干扰处可形成零陷,零陷平均深度达到-85 dB,满足干扰抑制的要求。图1(b)为SA-RAB算法方向图主瓣展宽的示意图。

(a) 算法方向图

(b) 主瓣宽度图1 SA-RAB算法方向图
试验2设均匀线阵由32个全向阵元构成,阵元间距d=λ/2,期望信号方向为0°,在-10°、10°、20°各有一个互不相干的干扰,干扰的干噪比均为50 dB,快拍数为400.
图2(a)为SA-RAB算法、CAPON算法、子空间算法与SOCP算法输出SINR随误差上界ε0变化的对比。从图2(a)可以看出,SA-RAB算法输出SINR随误差上界ε0的增加基本保持不变,即SA-RAB算法对误差具有良好的适应性;子空间算法与SOCP算法输出SINR随误差上界ε0的增加而下降;CAPON算法输出SINR随误差上界ε0的增加快速下降。图2(b)为各算法输出SINR随误差上界变化的局部放大图。

(a) 输出SINR随输入变化对比
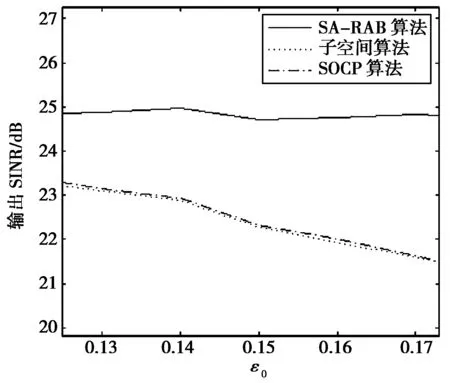
(b) 局部放大图图2 几种算法输出SINR随ε0变化对比
试验3设均匀线阵由32个全向阵元构成,阵元间距d=λ/2,期望信号方向为0°,在-10°、10°、20°各有一个互不相干的干扰,干扰的干噪比均为10 dB,误差上界ε0=0.1,快拍数为400.
图3(a)为SA-RAB算法、CAPON算法、子空间算法与SOCP算法输出SINR随输入信号噪声比(SNR)变化的对比。从图3(a)可以看出, SA-RAB算法、子空间算法与SOCP算法输出SINR随输入SNR增加而增加,且SA-RAB算法输出SINR高于另外两种算法;CAPON算法在存在导向矢量误差的情况下,输出SINR随输入SNR的增加先增加后减少。图3(b)为各算法输出SINR随SNR变化的局部放大图。

(a) 输出SINR随输入SNR变化对比

(b) 局部放大图图 3 几种算法输出SINR随输入SNR变化对比
4. 结 论
在导向矢量存在误差的情况下,传统自适应波束形成算法存在稳健性下降的问题。根据真实导向矢量与理想导向矢量之间的误差,运用谱分析技术确定波束主瓣宽度,利用SOCP技术实现平顶主瓣自适应波束形成,提出一种SA-RAB算法,有效地解决了该问题。算法根据导向矢量误差自适应确定主瓣宽度,在主瓣宽度内形成平顶响应,并可有效地抑制干扰,且可输出较高的SINR.算法对导向矢量误差具有非常优越的性能,是一种稳健的自适应波束形成算法。
[1] CARLSON B D.Covariance matrix estimation errors and diagonal loading in adaptive arrays[J].IEEE Transactions on Aerospace and Electronic systems, 1988, 24(4): 397-401.
[2] 曾 操, 廖桂生, 杨志伟. 一种加载量迭代搜索的稳健波束形成[J]. 电波科学学报, 2007, 22(5): 779-784.
ZENG Cao, LIAO Guisheng, YANG Zhiwei. Diagonal loading level estimation for robust beamforming[J]. Chinese Journal of Radio Science, 2007, 22(5): 779-784. (in Chinese)
[3] GOLDSTEIN J S, REED I S, SCHARF L L. A multistage representation of the Wiener filter based on orthogonal projections [J]. IEEE Transactions on Information Theory, 1998, 44(7): 2943-2959.
[4] HAIMOVICH A M, BAR-NESS Y. An eigenanalysis interference Canceler[J]. IEEE Transactions on Signal Processing, 1991, 39(1): 76-84.
[5] FELDMAN D D, GRIFFITHS L J. A projection approach for robust adaptive beamforming[J]. IEEE Transactions on Signal Processing, 1994, 42(4): 867-876.
[6]YU J L, YEH C C. Generalized eigenspace-based beamformers [J]. IEEE Transactions on Signal Processing, 1995, 43(11): 2453-2461.
[7] 刘桂瑜, 廖桂生, 陶海红. 一种样本污染且快拍数有限情况下的稳健的波束形成方法[J]. 电子与信息学报, 2009, 31(1): 192-195.
LIU Guiyu, LIAO Guisheng, TAO Haihong. A robust beamforming method in the situation of sample pollution and limited snapshots[J]. Journal of Electronics & Information Technology, 2009, 31(1): 192-195. (in Chinese)
[8] 曾 浩, 杨士中, 冯文江. 基于SVD的特征空间波束合成器[J]. 电波科学学报, 2008, 23(6): 1194-1198.
ZENG Hao, YANG Shizhong, FENG Wenjiang. Eigenspace beamforming based on SVD[J]. Chinese Journal of Radio Science, 2008, 23(6): 1194-1198. (in Chinese)
[9] 沈怡平, 腾升华. 基于四阶累积量的稳健波束形成算法[J]. 电波科学学报, 2008, 23(6): 1056-1060.
SHEN Yiping, TENG Shenghua. Fourth-order cumulant based robust blind beamforming algorithm[J]. Chinese Journal of Radio Science, 2008, 23(6): 1056-1060. (in Chinese)
[10]LI Jian, STOTICA P, WANG Zhisong. On robust capon beamformer and diagonal loading[J]. IEEE Transactions on Signal Processing, 2003, 51(7): 1702-1715.
[11] LI Jian, STOTICA P, WANG Zhisong. Doubly constrained robust capon beamformer[J]. IEEE Transactions on Signal Processing, 2004, 52(9): 2407-2423.
[12] ELNASHAR A, ELNOUBI S M, EL-MIKATI H A. further study on robust adaptive beamforming with optimum diagonal loading[J]. IEEE Transactions on Signal Processing, 2006, 54(12): 3647-3658.
[13]VOROBYOV S A, GERSHMAN A B, LUO Zhiquan. Robust adaptive beamforming using worst-case performance optimization: a solution to the signal mismatch problem[J]. IEEE Transactions on Signal Processing, 2003, 51(2): 313-324.
[14] ZHU L Y, SER W, ER M H, et al. Robust adaptive beamformers based on worst-case optimization and constraints on magnitude response[J]. IEEE Transactions on Signal Processing, 2009, 57(7): 2615-2628.
[15] 鄢社锋, 马远良. 传感器阵列波束优化设计[M]. 北京:科学出版社, 2009.
