合成孔径雷达子孔径数据改进ECS成像算法
2012-05-11杨立波陆和平
杨立波 陆和平 高 磊
北京航天自动控制研究所,北京 100854
合成孔径雷达(Synthetic Aperture Radar, SAR)具有全天时、全天候,远距离、高分辨率成像等特点,并具有测距测速能力,可大大提高战场感知能力,弹载SAR已成为微波成像和精确制导领域的研究热点[1-2]。由于弹上条件限制,弹载合成孔径雷达天线孔径小,方位理论分辨率高,远大于实际需求,另外,导弹运动变化剧烈,采用子孔径数据成像,可在满足方位分辨率的前提下,减小数据采集时间和成像延时,降低处理难度和负担,是弹载合成孔径雷达一种有效的成像方式。
SPECAN(Spectral Analysis)及改进SPECAN算法[3-4]和ECS[5](Extended Chirp Scaling)算法是常用的子孔径成像算法。SPECAN算法成像效率高,易于硬件实现[6],但这一算法仅校正距离徙动的公共线性部分,成像精度低,多用于中低分辨率成像。ECS算法是子孔径数据成像的精确算法,在弹载SAR成像中采用的较多[7-9],该算法能进行精确的距离徙动校正和高次相位补偿,但方位向chirp scaling操作会产生大量补零问题。
本文分析了ECS算法的大量补零问题,提出一种改进ECS算法,克服了ECS需要补零的不足,并进行了仿真实验。
1 回波信号模型
弹载SAR子孔径成像几何关系如图 1所示。设雷达沿y轴方向运动,速度大小为v,斜视角为θc,点目标B的视线距离为Rc。在慢时间零时刻,雷达位于A点,波束中心穿过P点,点目标B与P点的方位距离为yn。

图1 弹载SAR子孔径成像几何关系
经过ta后,雷达位于C处,点目标B的瞬时斜距BC可表示为:
R(ta;Rc,yn)=

(1)
设SAR发射线性调频信号,相干接收后,点目标B的基带回波信号为:
s(tr,ta)=rect(ta/Ta)wr(tr-2R(ta;Rc,yn)/c)
wa(ta-yn/v)exp{jπkr(tr-2R(ta;
Rc,yn)/c)2-j4πR(ta;Rc,yn)/λ}
(2)
其中,c为光速,tr为距离向时间,kr,λ为发射信号的调频斜率和波长,Ta为子孔径积累时间,wr(tr)为发射信号包络,wa(ta)为方位包络,rect(ta)为单位矩形窗函数。
2 ECS算法及其补零问题
2.1 算法流程
ECS算法通过距离向Chirp Scaling和二维频域处理校正距离徙动,通过方位Chirp Scaling将方位向信号补偿为线性调频信号,并使各距离单元的调频斜率一致,解决方位向输出间隔随距离变化的问题。ECS算法流程如图 2所示。

图2 ECS算法流程
1)方位向FFT及距离向Chirp Scaling
对回波信号进行方位FFT,忽略天线方向图的加权作用,变换后的信号表达式为:
S1(tr,fa)=wr(tr-2R(fa)/c)Wa(fa)
exp{jπkm(tr-2R(fa)/c)2}
exp{-j4πRccosθcD(fa)/λ}
exp{-j2πfa(yn+Rcsinθc)/v}
(3)

设CS操作的参考距离为Rref, r,参考频率为fref,则Chirp Scaling之后的信号为:
S2(tr,fa)=wr(tr-2R(fa)/c)Wa(fa)
exp{jπkm(tr-2R(fa)/c)2}
exp{-j4πRccosθcD(fa)/λ}
exp{-2πfa(yn+Rcsinθc)/v}
exp{jπkm(D(fref)/D(fa)-1)
(tr-2Rref,rcosθc/c/D(fa))2}
(4)
2)距离向FFT及距离压缩,二次距离压缩和距离徙动校正
距离向FFT之后的信号为:
S3(fr,fa)=wr(fr/kr)Wa(fa)
(5)
实现距离徙动校正,距离压缩和二次距离压缩的参考函数H2为:

(6)
经过上述处理后的信号为:

(7)
3)距离向IFFT及相位校正
距离向IFFT后的信号表达式为:
(8)
(8)式中的第3个指数项是由距离向Chirp Scaling所产生的无用相位,校正该相位的因子为
H3(Rc,fa)=
(9)
校正后的信号为
S6(tr,fa)=sinc(tr-2Rccosθc/c/D(fref))Wa(fa)
exp{-2jπfa(yn+Rcsinθc)/v}
exp{-j4πRccosθcD(fa)/λ}
(10)
4)方位向Chirp Scaling
方位向Chirp Scaling补偿方位高次相位,并调整方位调频斜率,使方位向输出间隔一致。
将D(fa)在fa=fc处泰勒展开,有:
(11)
其中,e表示高次项误差,由(11)式可得:
(12)
因此,补偿高次项相位误差的相位因子为:
φ1=exp{j4πRccosθce/λ}
(13)
为了保证方位向输出间隔一致,乘以以下频域线性调频信号:
φ2=exp{-jπλ(Rc-Rref,a)(fa-fc)2/(2v2cos2θc)}
(14)
其中,Rref, a为方位CS参考距离。
将φ1,φ2合并,可得方位向Chirp Scaling相位因子:
H4(Rc,fa)=exp{j4πRccosθc(D(fa)-cosθc)/λ}
exp{j2πRcsinθc(fa-fc)/v}
exp{jπλRref,a(fa-fc)2/(2v2cos2θc)}
(15)
处理后的信号为
S7(tr,fa)=sinc[B(tr-2Rccosθc/c/D(fref))]
Wa(fa)exp{-j4πRc/λ}
exp{-j2πynfa/v+jπλRref,a(fa-fc)2/(2v2cos2θc)}
(16)
5)方位IFFT及方位去斜和斜视校正
方位IFFT后的信号为:

(17)
其中,β=Rref,a/Rc,kref=2v2cos2θc/λ/Rref,a。
方位去斜(Dechirp)用以补偿(17)式的二次相位项,这里,我们在去斜的同时补偿多普勒中心频率,去斜函数为:
(18)
去斜成像后,yn相同的目标在图像中处于同一方位线,图像的两个方向不正交。为了使方位相同的目标在图像中处于同一方位线,可在去斜的同时乘以以下相位因子(本文称为斜视校正因子):
H6(ta)=exp{j2πkrefRcsinθcta/v}
(19)
6)方位FFT
最后进行方位向傅里叶变换,可得成像结果:

exp{-j2π(1-β)ynfa/v}sinc[B(tr-2Rc/c)]
sinc[βTa(fa-krefya/v)]
(20)
其中,
ya=yn+Rcsinθc
(21)
为目标的方位坐标。
2.2 补零问题
由(17)式可知,经过方位向调频斜率调整,信号变换到方位时域后,一方面信号时宽发生变化;另一方面,信号出现时延。信号展宽程度与目标距离有关,信号时延大小与目标的距离和方位都有关。这种不一致的展宽和时延导致方位向信号能量分布在一个比Ta大得多的范围内。
在距离R=Rref,a+ΔR处,方位IFFT后,信号总的持续时间
(22)

信号能量分布在方位向的展宽要求ECS算法在一步处理前对信号补零,否则,方位向IFFT之后,Ta范围之外的信号能量就会卷绕进Ta内,导致最终成像结果中目标峰值降低,主瓣展宽,并出现严重的虚假目标,而方位向补零导致算法效率降低,实时性变差。
3 改进ECS算法
方位向调频斜率的一致化调整是出现上述问题的根本原因,本文算法在补偿方位向高次相位时不进行调频斜率调整,采用变标傅里叶变换(Scaled Fourier Transform, SCFT)校正方位向输出间隔随距离变化的扇形畸变。算法流程如图 3所示。
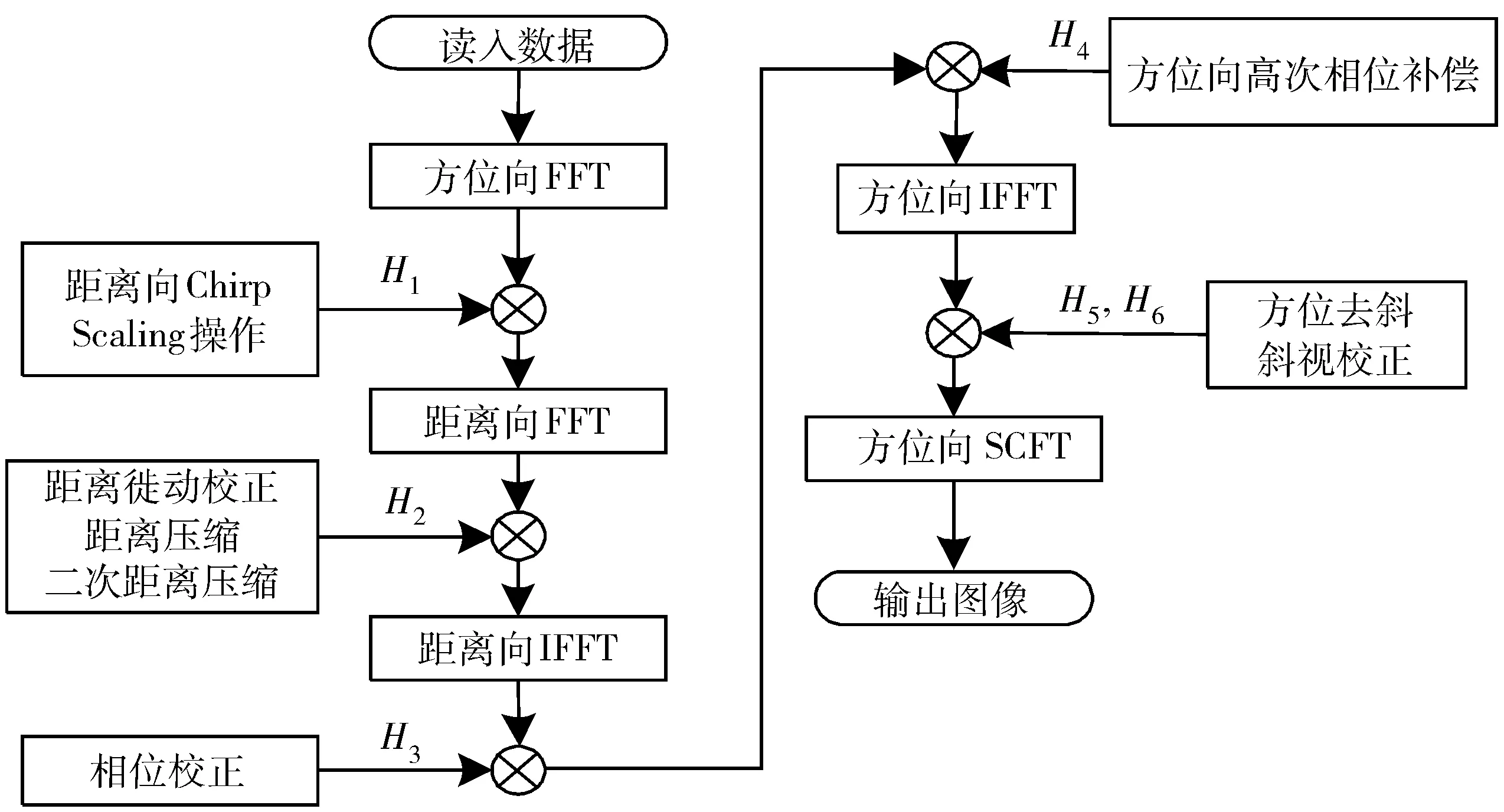
图3 改进ECS算法成像流程
方位向高次相位补偿之前的处理流程与ECS算法相同,不进行调频斜率一致化调整的方位向高次相位补偿信号H4为:

(23)
方位IFFT之后的信号为:
(24)
方位去斜参考信号H5变为:

(25)
斜视校正相位因子H6变为:
H6(ta)=exp{j2πkcRcsinθcta/v}
(26)
方位SCFT变换的表达式为:
S8(tr,fa)=SCFT[S7(tr,ta)]
(27)
其中,α为变标因子。
SCFT可由chirp-z变换高效实现[10],chirp-z变换将上述积分转化成卷积:


(28)
其中,S7(tr,fa)即为S7(tr,ta),只是以变量fa代替了变量ta。式(28)中的卷积可由FFT来实现。通过FFT实现chirp-z变换的流程如图 4所示。

图4 FFT实现chirp-z变换流程
方位向SCFT后,可得成像结果:
(29)
令

(30)
则(29)式为
(31)
4 仿真实验及结果分析
仿真参数如表 1所示。
设置地面上大小为200m (x向)×400m (y向)的目标点阵进行仿真成像,点阵中心的斜距为9km,方位为-100m。成像结果如图 5(a)所示。为说明ECS算法在不补零情况下的目标卷绕问题,在相同条件下,采用ECS算法成像,结果如图 5(b)所示。

表1 仿真参数
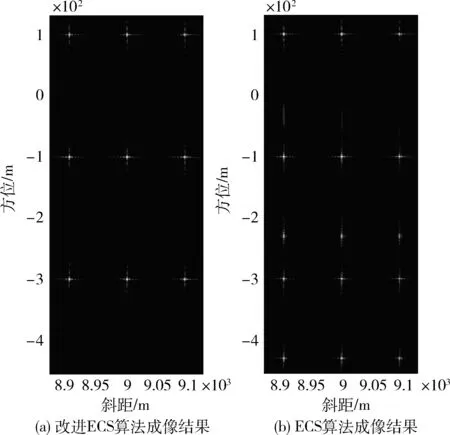
图5 改进ECS算法与ECS成像结果
由图 5可见,改进ECS算法能将目标压缩到正确位置,而ECS算法出现严重的虚假目标。
斜距为9km的3个点目标方位向性能指标如表 2所示。

表2 改进ECS(IECS)算法与ECS算法性能比较(未加权)
由表 2可见,对于改进ECS算法,3个点目标压缩性能一致,对于ECS算法,目标1和目标2产生了虚假目标,其峰值降低,主瓣展宽。
由以上仿真结果可看出,改进ECS算法可得到良好的成像结果,并能克服ECS算法中调频斜率一致化调整所导致的大量补零问题。
5 结束语
ECS算法是弹载SAR子孔径成像常采用的算法。本文分析了ECS算法方位向CS操作所产生的大量补零问题,提出了一种改进ECS算法,采用变标傅里叶变换校正方位向输出间隔随距离变化的扇形畸变,克服了ECS算法需要大量补零的不足。仿真实验表明,改进ECS算法无需补零,并可得到良好的成像结果。
参 考 文 献
[1] 尹德成.弹载合成孔径雷达制导技术发展综述[J].现代雷达, 2009, 31(11): 20-24.(YIN De-cheng.Review of Development of Missile-borne SAR Guidance Technology[J].Modern Radar,2009, 31(11): 20-24.)
[2] 秦玉亮, 王建涛, 王宏强, 等.弹载合成孔径雷达技术研究综述[J].信号处理, 2009, 25(4): 630-635.(QIN Yu-liang, WANG Jian-tao, WANG Hong-qiang, et al.Overview on Missile-borne Synthetic Aperture Radar[J].Signal Prcossing, 2009, 25(4): 630-635.)
[3] M.Sack, M.R.Ito, I.G.Cumming.Application of Efficient Linear FM Matched Filtering Algorithms to SAR Processing[J].IEEE Proceedings-F, 1985, 132(1):45-57.
[4] R.Lanari, S.Hensley, P.Rosen.Chirp-Z Transform Based SPECAN Approach for Phase-preserving ScanSAR Image Generation[J].IEE Proceedings Radar, Sonar and Navigation,1998, 145(5): 254-261.
[5] Alberto Moreira, Josef Mittermayer, Rolf Scheiber.Extended Chirp Scaling Algorithm for Air- and Spaceborne SAR Data Processing in Stripmap and ScanSAR Imaging Modes[J].IEEE Transaction on Geoscience and Remote Sensing,1996, 34(5): 1123-1136.
[6] 周宝亮, 张顺生, 戴春杨, 等.基于SPECAN技术的子孔径RD成像算法[J].通信技术,2010, 43(8): 250-252.(ZHOU Bao-liang, ZHANG Shun-sheng, DAI Chun-yang, et al.Sub-aperture RD Imaging Algorithm Based on SPECAN Technology[J].Communications Technology, 2010, 43(8): 250-252.)
[7] 刘高高, 张林让, 刘昕, 等.一种曲线轨迹下的大场景前斜视成像算法[J].电子与信息学报,2011, 33(3): 628-633.(LIU Gao-gao, ZHANG Lin-rang, LIU Xin, et al.Missile-Borne Large Region Squint SAR Algorithm Based on a Curve Trajectory[J].Journal of Electronics & Information Technology, 2011, 33(3): 628-633.)
[8] 孙兵,周荫清,陈杰,等.基于恒加速度模型的斜视SAR成像CA-ECS算法[J].电子学报, 2006, 34(9): 1595-1599.(SUN Bing, ZHOU Yin-Qing, CHEN Jie, et al.CA-ECS Algorithm for Squinted SAR Imaging Based on Constant Acceleration Model[J].Acta Electron Sinica, 2006, 34(9): 1595-1599.)
[9] ZHOU Qiang, QU Changwen, SU Feng, et al.A New Approach of Extended Chirp Scaling Algorithm for High Squint Missile-Borne SAR Data Processing[C].2008 International Symposium on Computer Science and Computational Technology, Shanghai, China, 2008: 133-136.
[10] L.R.Rabiner, R.W.Schafer, C.M Rader.The Chirp-Z Transform and Its Application[J].Bell System Tech.J., 1968, 48: 1249-1292.
