装备保障任务规划系统体系结构研究
2012-04-29张春润熊林伟赵坤刘亚东刘增勇邵鹏飞
张春润 熊林伟 赵坤 刘亚东 刘增勇 邵鹏飞


[摘要] 通过对装备保障任务规划系统的需求分析,得出并阐述了装备保障任务规划系统的基本功能,给出了一种单装备保障力量单元规划系统与多装备保障力量单元协同任务规划系统体系结构。
[关键词] 装备保障;任务规划;系统;体系结构
doi : 10 . 3969 / j . issn . 1673 - 0194 . 2012 . 16. 035
[中图分类号]E917[文献标识码]A[文章编号]1673 - 0194(2012)16- 0055- 03
任务规划是一门伴随现代信息技术而发展起来的高新技术,已被广泛应用于飞机、水面舰艇、地面车辆的导航系统中。目前国内关于任务规划的研究主要集中在作战指挥方面,而装备保障指挥方面的研究则十分欠缺。为提高和确保装备保障力量的保障效能和生存能力,故对装备保障任务规划系统体系结构进行研究,以适应未来战争的信息化、智能化和无人化发展趋势。
装备保障任务规划系统,指在从保障任务目标确定到保障任务完成的整个过程中,安排装备保障力量执行何种保障任务以及如何实施保障,使装备保障力量生存概率和整体保障效能达到最佳。整个规划系统由威胁建模、威胁评估、任务分配、路径规划、战术决策以及指控中心等子系统组成,并在指控中心系统的指挥控制下,实现对装备保障任务的规划与实时重新规划。规划系统最后所给出的具体规划结果包括装备保障力量分配、保障任务分配和保障路径。
1系统需求分析
装备保障是为满足部队遂行各项任务的需要,对装备保障采取的一系列保证性措施以及进行的相应活动的统称。装备保障力量是实施装备保障的主体,装备保障的对象是装备保障任务,装备保障的过程即装备保障力量完成装备保障任务的过程。装备保障力量与装备保障任务,在正常情况下,二者是一一对应关系,即有多少的保障任务就有多少对应的装备保障力量。但实际上,通常情况下实际的装备保障力量是少于装备保障任务所需的装备保障力量的,战时这种差距更大。信息化战争条件下,战场环境复杂、作战样式多变,首先直接导致了装备保障任务的多样、多变及不确定性,难以准确预测装备保障任务类型、数量、发生地点等;其次也导致装备保障力量的战损、补充的动态变化。二者关系如图1所示。二者的这种不确定性与动态性,最终导致装备保障复杂性、不确定性甚至是低下的装备保障效率。这就需要对装备保障任务与装备保障力量进行规划,减少二者之间对应的不确定性,增强装备保障效益。
由于战时装备保障任务主要是由敌方攻击导致装备的战损而产生装备保障任务,这导致装备保障任务的不确定性远远高于装备保障力量,因此上述规划应以装备保障力量为基础。未来装备保障力量模块化编组是装备保障力量发展的趋势,加之战时装备保障力量是按照群—队—组的形式区分编组装备保障力量的, 因此,该规划系统中将装备保障力量划分为装备保障力量单元,并以装备保障力量单元为基本研究对象。
2系统基本功能
对装备保障而言,装备保障任务规划系统的基本功能是根据装备保障能力和装备保障任务地域地理环境、威胁环境等因素,为装备保障任务目标规划出满足要求的保障力量与保障路径,并可以根据需要进行局部重新规划。为确保装备保障过程中装备保障力量的有效利用和任务的完成,一般需要多种装备保障力量单元进行协同,因此对于装备保障任务规划系统而言,协同功能尤为重要。其主要功能包括:
2.1 系统内的多装备保障力量单元保障任务规划与分配
将保障任务按重要性、紧迫性进行区分,按照保障任装备保障力量单元在保障地域的分布,调配相应的装备保障力量单元。例如:有M个装备保障力量单元要对N个保障任务目标进行保障,如何对这些装备保障任务进行分配要根据保障效能以及目标的重要程度进行合理分配。首先任务规划系统按照重要性与紧迫性选取任务目标进行保障,并确定任务目标的保障顺序及任务路径。
2.2 装备保障力量单元间共享资源的协调
为完成所分配的任务,合理地将系统中的共享资源(如通用工具子系统、技术人员、通信、控制系统以及各种信息等)分配给各个装备保障力量单元。这要求装备保障力量单元具有较强的数据通信能力以及数据融合的能力,以便装备保障力量单元之间要进行最低限度的通信,既能实现相互协同,又能保证隐蔽性,不容易被敌方侦察和干扰。
2.3 多装备保障力量单元之间的协同任务路径规划
在装备保障过程中,当某个装备保障力量单元被指派去完成某个确定的装备保障任务,二者之间的能力与需求关系是确定的,那么装备保障力量单元如何到达装备保障任务地点即选择机动路径就十分重要。规划系统根据保障任务地域环境,综合评估战场威胁、通行条件、任务时间、通信条件等,规划装备保障任务路径。同时,在任务路径规划过程中,需要做好装备保障力量单元之间的协同,避免多个装备保障力量单元进行同一个保障任务等造成的保障力量局部过剩、重要保障任务目标装备保障力量稀缺的现象。
2.4 多装备保障力量单元之间的协同控制
主要指多装备保障力量单元在机动途中的协调控制,避免装备保障局部过度集中造成目标过大,及共同完成某项任务时力量单元之间的协调操纵及其控制。
3多保障力量单元协同任务规划系统的体系结构
在复杂多变的战场环境中,装备保障任务规划系统的体系结构在很大程度上决定着系统作战的效率和灵活性,体系结构的选择应能使系统满足良好的伸缩性、高鲁棒性、高可靠性、快速反应能力、动态重构能力以及容错能力等要求。
多装备保障协同任务规划系统的体系结构主要分为集中式控制和分布式控制两类系统。
如图2所示,集中式控制系统的特点是由唯一的任务指控中心对整个系统进行控制。在集中式控制系統中,任务规划功能集中在任务指控中心,装备保障力量单元仅具有底层控制功能。但集中式控制可靠性低、通信延迟、计算量大、消耗时间长、缺乏鲁棒性。
如图3所示,分布式控制系统的特点是各装备保障力量单元具有完全的控制功能,能够独立的规划任务与底层控制,并可通过各装备保障单元之间的通信来实现任务协同规划。但在现有技术水平上,装备保障平台在态势评估和决策能力上还远远不能与人的能动性相提并论,人依然是整个系统中的关键决策因素。因此,分布式控制系统很难实现系统真正的协同和获得最大整体效能。
为了更有效地实现多装备保障单元协同保障,一种新型的分布/集中混合式体系结构被提出,如图4所示。分布/集中混合式体系结构综合分布式控制系统和集中式控制系统的优点,能够更好地发挥装备保障单元自主与集中指挥的互补优势以及保障人员的主观能动性。在分布/集中混合式体系结构中,装备保障力量单元在执行任务之前,先由任务指控中心通过预先规划为装备保障力量单元提供一个初始任务计划;在装备保障执行任务中,装备保障力量单元在系统控制下按计划执行任务;当战场态势发生变化时,装备保障力量单元自主决策,各装备保障单元之间通过相互间通信实现保障任务协同,并将协同结果传送给任务指控中心,任务指控中心将对装备保障自主决策的结果进行评估,决定是否对其进行干预。
在分布/集中混合式体系结构中,任务指控中心可以是陆基、舰基,也可以综合到空中指控中心。它的主要任务是对多个装备保障单元进行初始任务规划,并负责在任务执行过程中对装备保障单元进行监控,任务指控中心具有对装备保障控制的最高优先权,可随时与每个装备保障单元进行通信,并能随时调整每个装备保障单元的任务规划。各装备保障力量单元之间具备完全对等的独立分析、规划及协调能力,能根据分配到的任务目标进行数据收集、数据分析和任务规划。
4 装备保障力量单元任务规划系统
装备保障力量单元任务规划系统主要组成和逻辑结构如图5所示,其核心组成和主要功能包括信息融合、威胁建模、态势评估、路径规划等子系统。
4.1 信息融合子系统
所谓信息融合,就是利用计算机技术对获得的若干传感子系统数据在一定准则下加以自动分析、综合,以获取决策与任务规划所需的信息而进行的信息处理过程。多传感子系统是信息融合技术的基础,多源信息是信息融合的加工对象,协调、优化是信息融合的核心。
装备保障力量单元为了获得“全方位”的测量信息,一般载有高度表、温度计、GPS、激光测距仪等多种传感子系统,所测量的信息不仅包括机动平台本身的位置、速度、运行状态,还包括机动平台所处的外部环境信息,如地形地物、气象等,并且将这些参数反馈至机动平台计算机,规划并控制平台的任务路径。要使这些传感子系统协同起来为实现这一目标共同工作,就必须对多传感子系统信息进行融合。目前,比较成熟的多传感子系统信息融合方法有卡尔曼滤波、加权平均、贝叶斯估计、统计决策等。
4.2 威胁建模子系统
该系统主要根据已知威胁系统信息,参照威胁数据库和地形数据库,对反映威胁状态的空间分布进行描述,即生成威胁空间,主要是由分布于地面上的障碍、敌步兵和武器子系统形成的、对保障单元具有威胁性的攻击或杀伤区等。广义地讲,威胁空间不仅包括障碍与地面高炮的火力障碍,而且还包括敌方空中拦截力量、预警机雷达、各种气象因素和人工障碍等造成的对保障安全具有威胁性的空间区域;尔后结合装备保障力量单元的特性与能力,对威胁空间的每一点进行威胁级别的判定处理,以满足威胁评估、路径规划的要求。
4.3 态势评估子系统
为了正确、可靠、高效地完成复杂的保障任务,就必须首先对战场的态势进行评估。态势评估以军事知识和军事经验为基础,自适应地对急剧动态变化的战场场景进行监控,按照军事专家的思维方式和经验,自动对多源数据进行分析、推理和判断,做出对当前战场情境合理的解构,为军事指挥员提供较为完整准确的当前态势分析报告。态势威胁评估是一个涉及不确定性的信息融合的推理和决策过程,可采用的方法一般有基于统计理论的经典推理、贝叶斯推理和D-S证据推理;有基于知识的专家系统、黑板模型等方法;还有近年来发展很快的模糊集合理论、神经网络、遗传算法等。
4.4 任务路径规划子系统
任务路径规划是指在特定约束条件下,寻找从初始点到目标点,并且满足某种性能指标最优的运动轨迹。装备保障路径规划是以实现地形跟随、地形回避和威胁回避为手段,利用地形和敌情等信息,规划出生存率较高的任务路径。装备保障力量单元路径规划系统是保障任务规划系统的核心,主要实现装备保障力量单元路径规划、冲突检测与消解以及选择性管理等,其主要难点在于如何在不确定性战场环境下出现突发威胁源或突发事件时,规划系统能够根据态势评估结果对任务路径作出实时重新规划,并实现冲突检测与消解。
5多装备保障力量单元协同任务规划系统的逻辑结构
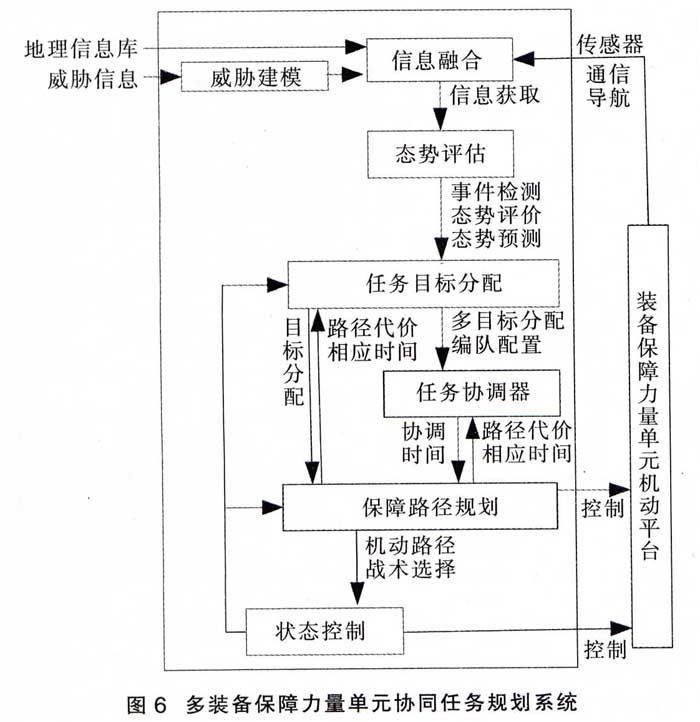
根据多装备保障协同任务规划系统的层次特性,多装备保障协同任务规划系统如图6所示,其组成部分包括信息融合、威胁建模、态势评估、任务目标分配、任务协调、任务路径规划等子系统,其中目标分配、任务协调及任务路径规划子系统为其核心部分。与单装备保障力量单元任务规划系统相比,信息融合、威胁建模、态势评估3部分功能基本相同,主要增加了目标分配和任务协调两部分,并且在保障路径规划部分更加注重新规划的协同性。 主要介绍一下目标分配子系统、任务协调及保障路径规划等3个子系统。
5.1 保障任务分配子系统
在多装备保障力量单元协同保障过程中,不可避免地要面临多保障力量单元协同的多任务分配和编队配置问题。多装备保障力量单元协同保障的任务分配问题就是确定哪些装备保障力量单元完成哪些保障任务,并对装备保障单元编队、设计其路径,使得整个装备保障系统的保障效能最高,保障代价最小等。任务分配子系统从路径规划子系统获得各装备保障单元对各个保障任务的预估路径代价和需要耗费的时间范围,按照保障任务要求确定协调分配方案,将保障目标分配给各保障力量单元。
5.2 任务协调子系统
任务协调子系统的主要协调管理多个装备保障力量单元协同完成任务,使多个装备保障力量单元达到时域和地域上的协同,协调的关键是所有装备保障单元在时间上同时达到目标点。
当战场环境发生变化时,导致某些装备保障力量单元无法继续按原定规划完成任务时,应当实时调用保障路径规划子系统,协调各装备保障力量单元的任务路径,协调管理装备保障力量单元,确保规划的有效执行。
在多装备保障单元协同任务规划系统的逻辑结构中,虽然任务分配子系统和任务协调子系统都需要任务路径规划子系统进行有关的保障路径规划,但它们对任务路径规划的要求和针对的环境是不同的。任务分配子系统需要了解所有装备保障力量单元对保障任务目标的路径代价,而非具体的环境细节与装备保障力量单元的机动性能,主要要求快速获得装备保障力量单元的任务路径代价和耗费时间。而任务协调子系统只需要得到需要协调的与重新规划的任务路径的路径代价,需要比较细致和较具体的环境信息,要求考虑各种约束条件(机动性能、通行条件等),其要求规划的粒度比较细,并获得对装备保障来说顺畅可行的保障路径代价和相应的运行时间。
5.3 任务路径规划子系统
任务路径规划子系统是任务规划系统的核心,主要实现多装备保障力量单元的协同任务路径规划、冲突检测与消解等。根据装备保障任务的约束条件、装备保障力量单元能力以及战场环境等因素,同时为多个装备保障力量单元设计完成保障任务的多条保障路径,并实现保障力量单元在空间和时间上的協调一致。
6结语
装备保障任务规划是充分发挥多装备保障力量单元协同保障优势、保持任务复杂性与装备保障能力之间良好协调性的关键问题,是一个复杂的多约束、多目标优化与决策问题。首先对装备保障任务规划系统的本质进行了深入分析;接着在分析未来装备保障任务的基础上,构建了分布/集中混合式多装备保障力量单元协同任务规划系统体系结构;最后研究了单装备保障力量单元任务规划系统和多装备保障单元协同任务规划系统的逻辑结构。
主要参考文献
[1]李舜志,吴明曦.军事装备保障学[M].北京:军事科学出版社,2009.
[2]程路尧,朱建冲,蔡纪伟.航空装备保障任务规划系统体系结构研究[J].兵工自动化,2008(11):26-28.
[3]谭跃进,李菊芳,徐一帆.军用任务规划与管理技术[J].军事运筹与系统工程,2010(4):23-28.