步进电机启动频率对太阳能发电系统效率影响
2012-04-23常玲
常 玲
(渤海大学工学院,辽宁锦州 121013)
太阳能作为一种可再生能源,因其开发和利用丰富、能源广阔,对环境污染小等优点,越来越受到重视。提高太阳能光伏发电装置的效率,无论是从科技应用还是从商业利用都成为急需解决的课题。采用太阳能自动跟踪装置是提高太阳能利用率、降低光伏发电成本的有效途径[1]。光伏电池的发电量与太阳光入射角有关,当太阳光线与太阳电池平面垂直时,发电量较大[2-4]。光伏发电自动跟踪系统可使光伏电池始终对准太阳,以提升发电系统效率[5]。
目前采用的跟踪方法主要有视日跟踪和光电式跟踪,视日跟踪式是根据太阳运行轨迹的规律计算出任何时间和地点太阳的位置,从而完成对日跟踪;光电式跟踪是通过采用光敏电阻作为传感器来测定入射光线与光伏电池法线之间的偏差。当偏差超过阈值时,控制跟踪装置产生动作而重新使光伏电池与太阳光线保持垂直,对准太阳,完成跟踪[6]。
因为步进电机具有精度高、惯性小、工作可靠、能实现高精度快速开环控制的特点,从而被广泛应用在各种不同的运动控制系统中。这完全符合太阳能跟踪系统高精确度控制的要求。所以对于电机的转动必须予以精确控制,即选用步进电机是较佳的方案。由于目前国内多数采用视日跟踪的方式[7],但这种跟踪方式会存在阴天电机能耗大问题,因此文中通过对跟踪控制系统中的步进电机功率效率的分析。证实了减少电机起动次数,可降低电机功耗,从而提高太阳能利用率的方法。
1 跟踪系统中步进电机主要能耗
根据步进电动机的运转特性低速情况下流过恒定的电流,而高速情况下为施加回路输出最高电压时的典型驱动速度一转矩特性。转矩急速下降的起始点则为2个区域的转折点。
在供给电动机的电能中,没有输出功率的部分即变成损耗,以热的形式散发。损耗大部分为铁损和铜损。铁损是产生于铁芯部分的损耗,分为磁滞损耗与涡流损耗两部分。磁滞损耗是因铁芯中磁通方向改变所需要的能量,与线圈电流的频率成比例增加。涡流损耗是由磁通变化产生于铁芯中的涡流导致的焦耳热损耗,与频率的二次方成比例增加。即两者合计的铁损,约与频率的1.5次方成比例增加。
铜损是由流过线圈中的电流产生的焦耳热损耗,因线圈是铜材,故称铜损。铜损与流过线圈电流的平方成比例变化,所以在定电流区铜损为恒定值;但在定电压区,随着速度的增加、电流减小,则铜损下降。
步进电动机与其他电动机相比较,因为其极数多,频率高,使用过程中能达到5 kHz。与其他电动机比较,频率约高100倍,这也是铁损较大的主要原因。铁损还随磁通密度的变化而变化,约为平方比例变化。铁芯中的磁通是由转子中的磁钢和定子电流共同产生的,在定电压区,由于电流的减小,磁通相应减小,此时产生弱磁效果,故铁损减小。
由定电流区向定电压区的过渡点,在与该点对应的速度下损耗较大。驱动电路产生的电压越高,其速度越高,因而损耗也大。高速则高损耗,其原因可用铁损耗来解释。近年来,为满足在较高速度下运转的要求,驱动电路的高电压化在不断发展,但不能忽视电动机损耗大的问题[8]。
在太阳能跟踪系统中,由于步进电机是低速运行,所以铜损是主要的。电机的运行分为5部分:起动、加速运行、连续稳定匀速运行、减速和停止运行。其中,电机连续运行时的功率效率保持不变,一般可达到80%以上。文中重点探讨在起动停止阶段步进电机的运行效率。
在电动机中,电磁转矩Te是拖动性质的,其必须与轴上的机械负载转矩Tm以及惯性转矩TJ相平衡,电动机的转矩平衡方程式为


由文献[9]有电动机输入的电磁功率为

电动机中输入功率P1为

其中,ik为k相绕组的电流;uk为k相绕组的旋转感应电压。由电磁转矩方程

其中,kt(ij)为 j相的转矩系数;mj为与j=a,b,c,d,e对应的系数,mj=1,2,3,4,5;θe为机械角度值。观察式(5)可知,当电磁转矩Te增加时,电流ij增加,则式(4)中电阻损耗增加,现在假设步进电动机位置角变化为 Δθ,并且可分为加速运行 Δθ1、匀速运行 Δθ2、减速运行 Δθ33 段,设这3 段所运行的时间为t1,t2,t3,则这3段所消耗的能量为w1,w2,w3,那么电动机位置角变化Δθ所消耗的能量为w=w1+w2+w3,这里
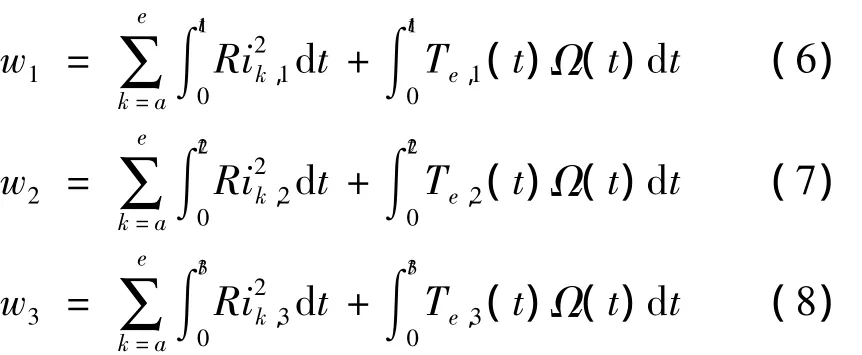
对于启动加速运行阶段,由于存在启动加速转矩TJ,则式(6)右侧第一项电流ik,1较大,所以电阻损耗较大;对于匀速运行阶段,由于不存在加速转矩 TJ,则式(7)右侧第一项电流ik,2较小,所以电阻损耗较小;对于减速运行阶段,由于空载损耗转矩T0和减速转矩TJ都是阻转作用,则式(8)右侧第一项电流ik,3较小,所以电阻损耗较小。
2 仿真结果与分析
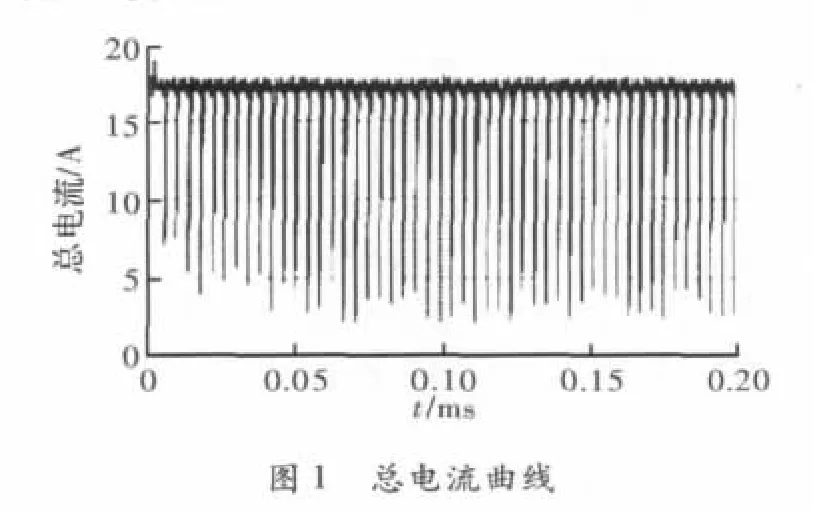
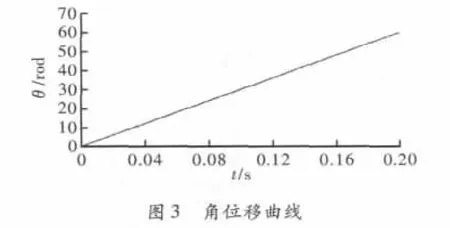
步进电动机的运行特性可分为动态运行特性和稳态运行特性。稳态是指在控制脉冲的频率保持恒定的情况下,步进电动机以该频率稳定运行时,转子以恒定的转速恒定运行的工作状态。步进电动机的稳态特性是研究者关心的问题。通过稳态运行分析,得到相应电流波形和牵出矩频特性,对步进电动机的优化设计有较大帮助,动态运行特性也是实践中被广泛关心的问题,动态运行特性主要包括单步运行特性,起动特性,升频、降频以及反转等过程,其中,单步运行特性尤为重要。文中采用文献[10]的仿真过程,其中用于仿真计算的电动机系统是一台130 BH550E五相混合式步进电动机恒总流驱动系统,其主要参数为:相绕组电阻R=0.3 Ω,绕组自感 L=3.93×10-3H,互感 M= -0.97 ×10-3H,步距角 θb=0.36°,额定相电流 IN=9 A,驱动电压Vdc=110 V,转子齿数Zr=50,旋转电压系数ke=1.24 V·s/rad,转子惯量 J=5.5 ×10-3kg·m·s2,取样电阻R5=0.5 Ω,参考电压V1ref=8.5 V,斩波频率为25 kHz,电机采用4-5相通电的5相20拍工作方式,其通电状态依次为:,在空载状态下步进电动机稳态运行和动态运行结果如图1~图7所示,其中图1~图3是稳态运行时的总电流、相电流和角位移曲线,从中可以看出,绕组电流不存在锯齿波,系统具有良好的运行特性。
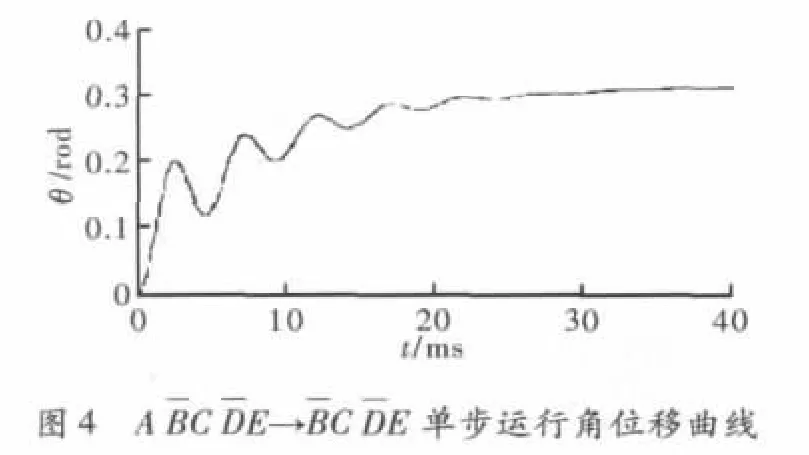
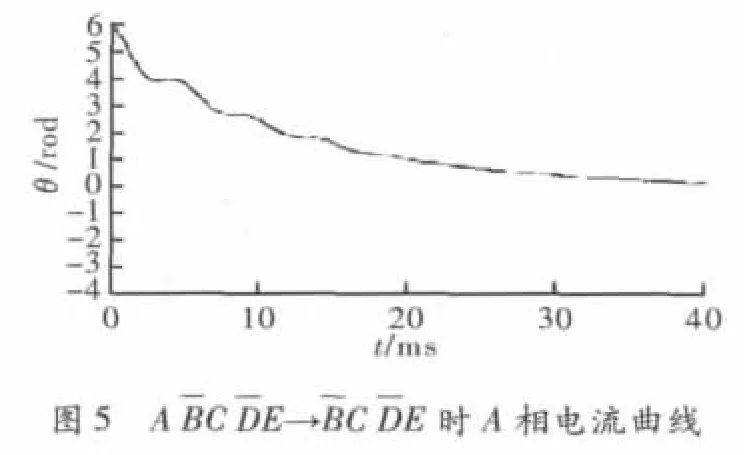
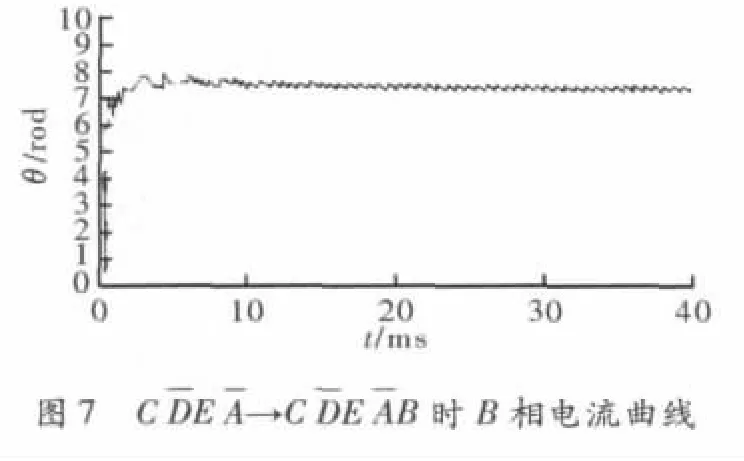
对于五相混合式步进电动机来说,按标准的半步方式运行时,存在着一步轻一步重的两步一循环的轻重步的现象。走步重时其特点是转子角位移移动较快,在短时间内,角位移达到最大值,略有超调,手感电机轴有明显的重步感觉;反之,当转子角位移移动较慢,手感电机轴有明显的轻步感觉。图4~图7是单步动态运行时的相电流和角位移曲线。从仿真的结果以及定性的分析知道,从图4和图6的波形曲线看,角位移振荡第一波峰的高度前者约为后者的50%。显然,图6A转换为重步,角速度振荡的振幅较大,图4C转换过程是轻步,振荡幅度较小。
如果取相电流为参照,稳态运行时由图2相电流均值约为12 A,由图3可以知道电机运行角位移约为12 rad,二者比值为1 rad/A;当步进电动机单步动态运行时,这里取了2步运行结果,由图4~图5可知时,相电流均值约为2 A,40 ms内角位移约为0.32 rad,二者比值为0.16 rad/A;由图6~图7可以看到时,相电流均值约为7.5 A,40 ms内角位移约为0.32 rad,二者比值为0.043 rad/A。通过以上角位移与相电流的比值,可以看出电机稳态运行时效率高。在相同角位移条件下,减少启动次数可使能耗降低。对于减小启动次数能否影响跟踪性能,由于光伏跟踪系统运行速度较低,所以不会对跟踪性能造成影响。在阴天情况下,减少步进电动机启动停止的次数,从而降低步进电动机能耗提高发电能力,当然还需要更智能的算法。


3 结束语
文中就太阳跟踪时步进电动机能耗问题,进行分析,论证了步进电动机启动频率与能耗的关系,从理论上给出提高太阳能发电系统发电率的一种影响因素,从而有利于进一步提高太阳能利用率。
[1] 白一鸣,孟宪尧.基于FPAG的太阳能自动跟踪控制系统[J].自动化技术与应用,2009,9(28):26 -28.
[2] SICHENG W.Review and trend of solar photovoltaic technology[J].International Power,1997,2(4):21 -23.
[3] DENIS A M,STEVEN K R.Object tacking through adaptive correlation [J].OpticalEngineering,2000,33(1):294-301.
[4] JOHNSTON D.Solar energy systems installed on Chinese -style buildings[J].Energy and Buildings,2007,39(4):385-392.
[5] PLATON BALTAS.Evaluation of output for fixed and step tracking photovoltaic arrays[J].Solar Energy,2003,20(26):779-785.
[6] 关继文.基于DSP的高精度太阳能跟踪控制器设计与实现[D].合肥:中国科学技术大学,2010.
[7] 陈维,李戬洪.太阳能利用中的跟踪控制方式研究[J].能源工程,2003,1(3):15 -18.
[8] 邓隐北,邢红超.步进电动机的节能[J].新能源,2011,26(2):49-52.
[9] 史敬灼.步进电动机伺服控制技术[M].北京:科学出版社,2007.
[10]徐传芳.基于Matlab/Simulink的五相混合式步进电动机系统动态仿真模型的建立与分析[D].大连:大连交通大学,2005.