基于谐波传动的星间链路天线驱动机构设计研究
2012-04-17刘继奎于国庆崔赪旻王友平
刘继奎,于国庆,崔赪旻,王友平
(北京控制工程研究所,北京 100190)
中继卫星作为地球同步静止轨道卫星用以实现地面站对中、低轨道航天器的跟踪和信息数据传送,带有大型的星间链路天线,口径大,指向精度要求高[1].星间链路天线驱动机构(GDA)是中继卫星必备的关键执行机构,安装于卫星本体之外,采用双轴形式具有两个旋转自由度,可以驱动星间链路天线分别绕方位轴和仰角轴转动,较一般卫星天线驱动机构具有长寿命、大驱动力矩、高精度指向和适应复杂空间环境的任务要求[2].
谐波传动具有减速比大、同时啮合齿数多、承载能力大、传动精度高、齿侧间隙小、结构简单及重量轻等优点,广泛地应用于航天、航空、航海、机床及仪器仪表、医疗器械、石油化工等多个领域[3-4],是GDA设计的较好选择.本文分析了星间链路天线驱动机构的设计约束,对基于谐波传动的设计方案及其关键技术进行了阐述,介绍了开展长寿命和高精度捕获跟踪性能验证的试验方案.
1 设计约束分析
在中继卫星中,GDA是完成建立星间通信链路的主要执行机构,其负载是大型星间链路天线,一般由卫星姿态和天线指向复合控制计算机完成控制任务,并需要适应卫星结构设计以及热、辐照等空间环境的要求.
主要设计约束分析如下:
1)整星结构布局.主要包括天线、射频发射与接收设备、天线展开支架及GDA的结构布局安排,约束要素包括外形尺寸、机械安装形式、转角范围及高频电缆的走线方式等,特别是天线与卫星其它结构间的干涉情况.
2)负载特性.星间链路天线口径尺寸大,重量和转动惯量也较大,结构系统挠性大,需要GDA的驱动能力、结构刚度和基频与之相适应.
3)天线与卫星本体之间的信号传输方式.由于天线只在有限转角范围内运动,一般不采用导电环进行信号传输,主要采用旋转关节或高频电缆直接传输.采用高频电缆传输时需要考虑电缆的固定、运动方式以及其扭转力矩的影响.
4)转角范围与运动方式.根据目标星的运行轨道,一般限定天线在有限转角范围内往复运动,根据跟踪频次作间歇或连续运动.在捕获目标星过程中,需要GDA在较小的角度范围内作往复运动,这对GDA的传动及摩擦系统具有更高的要求.
5)转动速度.分为跟踪速度、扫描捕获速度和快速机动速度.这需要GDA的电机驱动速度、传动系统的扭转频率以及整个驱动传动系统响应带宽与之匹配.
6)捕获跟踪性能要求.包括GDA的驱动力矩、定位保持力矩、传动精度、回差、扭转刚度、弯曲刚度、谐振频率、响应带宽以及寿命等性能,需要在寿命初期至寿命末期全程满足任务要求.
7)力学与空间环境特点.主要包括发射阶段的冲击振动和空间辐照、极限温度范围及冷热交变状况等.冲击振动可能会引起GDA的安装机械零位和测角传感器零位的漂移.GDA安装在卫星本体之外,在轨所处的辐照、热等空间环境相对恶劣.这需要GDA的结构设计、非金属材料选择以及润滑系统的润滑剂选择能够适应这些环境要求.
8)地面环境适应性.主要包括地面环境湿度、洁净度及重力等因素产生的锈蚀、污染及附加力、力矩等对GDA的影响.特别是天线重量大,所以地面试验时需要对天线系统进行重力卸载.
9)加工工艺性.包括原材料的可获取性、零件设计尺寸精度与机床加工精度的匹配性、特种工艺可实现性以及加工成本和周期等.
10)可靠度与技术成熟度要求.为实现产品高的可靠度和技术成熟度,应尽量减少串联环节上的功能部件数量和不可检、难于控制的特种工艺技术的选用,较多地继承或沿用成熟的零部组件和工艺技术,设计完成后开展充分的分析和验证.
11)轻量化要求.受发射能力和发射成本的限制,轻量化是所有航天产品的基本要求.在满足功能性能需求和保证一定安全系数的条件下,应尽可能降低产品重量.对于GDA而言,轻量化的难度在于还要保证结构的高强度和高刚度,以满足捕获跟踪系统对其模态的要求.
2 方案设计与主要关键技术
2.1 方案设计
2.1.1 双轴构型
双轴构型常用有三种形式.
一是框架支撑型.由内外框架构成,旋转轴的支承跨距大,结构刚度相对较强.示例如图1所示,是俄罗斯NPO PM公司(列舍特涅夫应用力学科学研究生产联合体)为射线中继卫星Loutch(Luch)研制的天线驱动机构.机构采用“步进电机+谐波齿轮”的驱动传动方案,负载为展开式网状天线,载荷的转动惯量为10kg·m2.
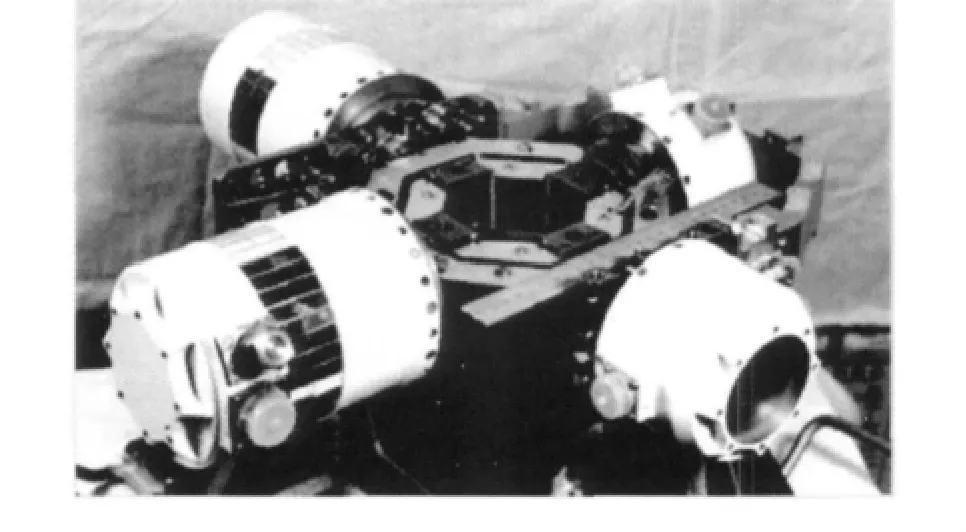
图1 俄罗斯Loutch(Luch)卫星天线驱动机构Fig.1 GDA for Loutch(Luch)Satellite,Russia
二是对称支撑型.双轴连接支架在每轴上为双端连接,承受负载的作用点在旋转轴支承跨距中间,整体结构紧凑,轴系受弯曲负荷相对小.示例如图2所示,是美国MOOG公司为日本COMETS卫星研制的天线驱动机构.驱动传动方案也为“步进电机+谐波齿轮”,负载可以达到 210kg,250kg·m2[2].

图2 日本COMETS卫星天线驱动机构Fig.2 GDA for COMETS Satellite,Japan
三是悬臂支撑型.单轴输出为单端连接,承受负载的作用点在旋转轴支承跨距之外,双轴连接方式简单,轴系承受弯曲负荷.示例如图3所示,是美国MOOG公司55型双轴驱动机构.其单轴驱动器基于铱星的太阳翼驱动机构设计,驱动传动方案是“2或3相步进电机+谐波齿轮”.

图3 美国MOOG公司55型双轴驱动机构Fig.3 Bi-axis GDA from MOOG company,USA
通过三者之间的比较可知,框架型和对称型的承载力系较为均衡,但转角范围受限制,而悬臂型自身能够实现360°转动.三种构型各有优缺点,需要根据卫星的具体应用需求确定最终选择何种形式.
2.1.2 单轴驱动器设计
双轴机构的核心设计内容是单轴驱动器设计,包括结构布局、驱动方式、传动方式、测角方式以及机电热接口等方面.
(1)结构布局
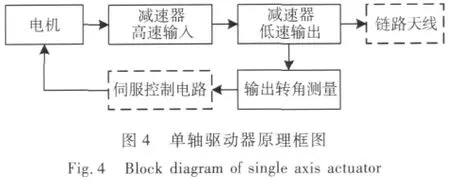
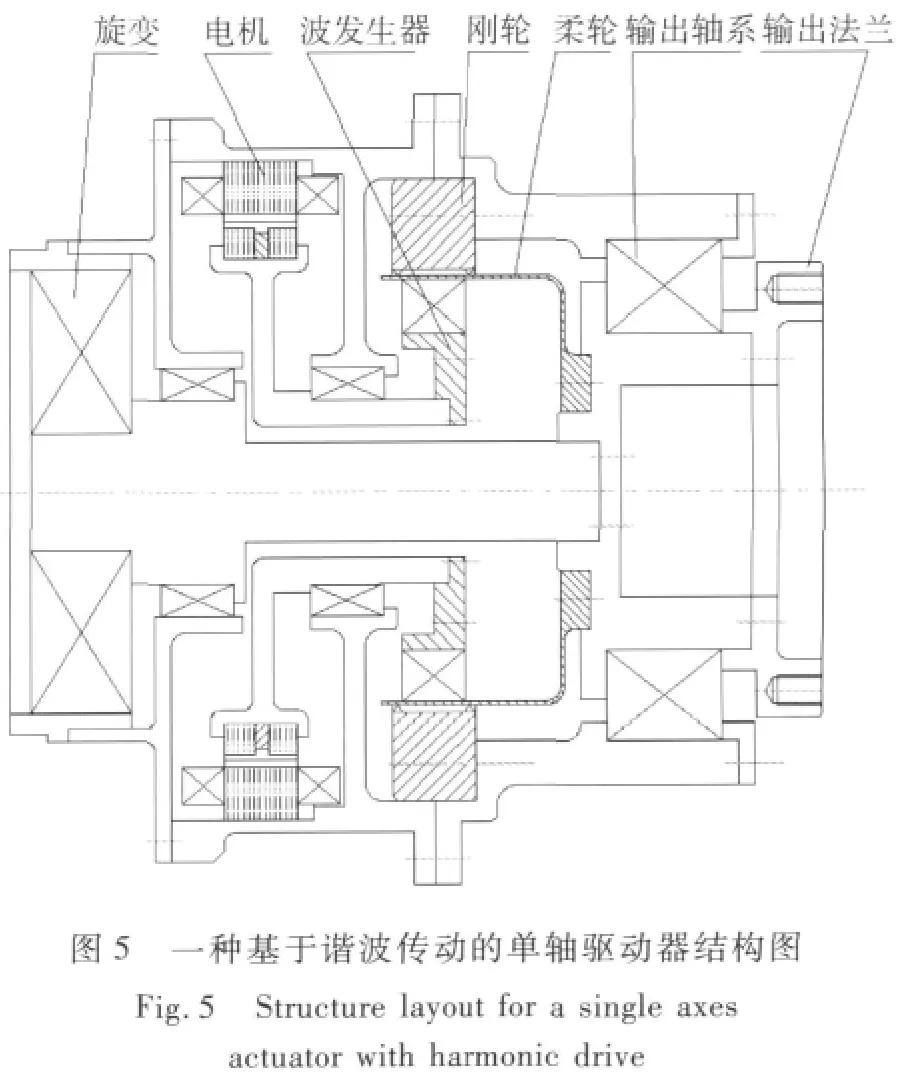
单轴驱动器的基本构成包括电机、支承轴系、减速器、测角传感器、测温器件以及结构支承零件等,结合伺服控制电路可以形成一个完整的驱动传动、测角的闭环执行系统,如图4所示(其中实线框为驱动器组成部分).图5是一种基于谐波传动设计的单轴驱动器结构框图.
(2)电机的选择
步进电机在低速驱动控制中普遍应用,可以获得期望的通电/不通电时的定位保持力矩,这也是链路天线定位所需的优点之一.步进电机的步进特性不利于实现高的运动稳定度,可以通过电路细分和机械减速的方法改善.通常步进电机可以整步驱动或半步驱动,可以单拍运行或双拍运行.单拍运行时,绕组通电方式为一相断电瞬时切换到另一相通电,变换较大易产生振荡,运行稳定性较差,所以宜采用双拍运行.
直流力矩电机因控制线路复杂且需要角度反馈而较少在低速控制中使用.
(3)谐波减速器的选择
谐波减速器由刚轮、柔轮、波发生器组成,可以固定其中任何一个,另外两个一个作为输入一个作为输出.通常较多选择刚轮固定,波发生器输入,柔轮输出,这时减速比计算公式如下[3]:

式中:i为减速比,ZR为柔轮齿数,ZG为刚轮齿数,负号“-”表示反向输出.
谐波减速器的扭转刚度表现为非完全线性,工作负载在额定载荷的20%以内时,刚度曲线为KA段,超过20%时,刚度曲线为KB段,如图6所示.由于在低负载时扭转刚度也较低,这和齿的啮合间隙、柔轮的扭转变形等都有关系,所以在低负载应用时需要特别注意.
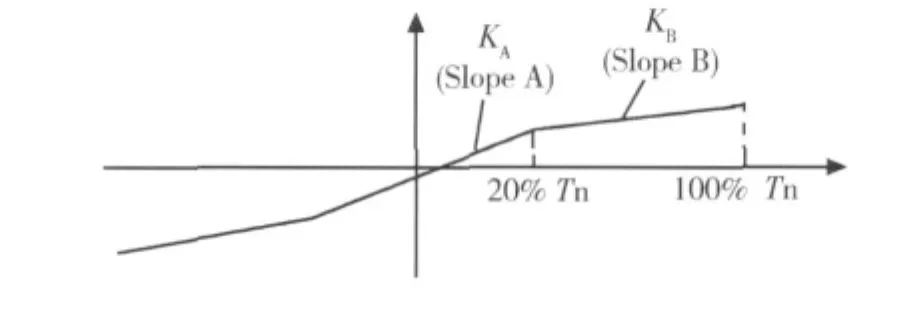
图6 谐波减速器扭转刚度曲线Fig.6 Twist stiffness curve of harmonic drive
(4)测角传感器的选择
常用测角传感器有光栅、磁栅、圆感应同步器、旋转变压器及电位计等多种形式.旋转变压器因具有精度较高、生产成本较低及耐恶劣环境性能强等综合性能优良的特点而被较多地选用.
旋转变压器的编码处理方法主要有三类:直接数字转换、鉴相法和跟踪反馈法.跟踪反馈法综合性能最优、应用最广,由正余弦乘法器、相敏解调器、滤波器、积分器、压控振荡器(VCO)和可逆计数器等主要环节组成一个数字伺服系统,机械角为输入量,数字角为输出量,使数字角跟踪机械角.其工作原理如图7所示.
(5)机电热接口设计
接口设计需要与整星匹配,并需要特别关注的设计要点如下:
1)机械接口.除了使用足够的螺钉、螺栓紧固以外,使用定位销可以增加安装精度和抗力学性能;在进行天线压紧时尽量减少对机构增加额外的力.
2)电接口.包括天线转动部分与星本体间的电连接和GDA自身的电连接,应关注天线高、低频信号传输对GDA测角信号的干扰影响.
3)热接口.根据天线系统的热状况确定机械安装界面的热传导方式以及机构表面热控涂层的参数,并考虑采用主动温控措施以改善机构的热状况.
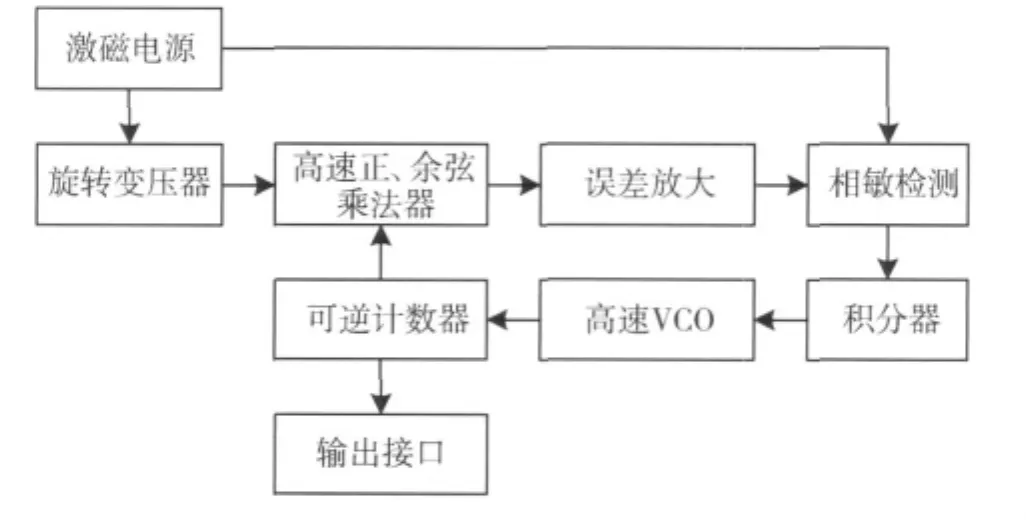
图7 跟踪反馈型轴角-数字转换原理框图Fig.7 Block diagram of axis angle-digital transformation based on tracing feedback
2.2 主要关键技术
2.2.1 紧凑而轻量化的结构设计
为实现结构紧凑和轻量化可以采取模块化设计和使用低密度、高强度的材料如钛合金、铝合金等,为保证轴承承载能力和疲劳寿命材料一般选用不锈轴承钢.选材时应注意材料膨胀系数不一致的结构匹配性,特别是温度变化对轴承预紧力及各结构运动间隙的影响.除此,还应注重以下方面的设计实现:
1)谐波传动的柔轮输出端的旋转支承轴系应具有足够的抗弯、抗剪能力以及高的旋转精度,减小或避免柔轮承受外部载荷弯矩、剪力等载荷.
2)波发生器在结构设计上应安排调整环节以控制安装深度.
3)轴系设计采用模块化设计,并减少彼此间的支承干扰.
4)采用固体润滑时避免磨屑对电机、测角器件的运动产生影响.
5)电机和测角器件的结构设计需避免彼此间产生电磁干扰.
2.2.2 长寿命润滑
包括润滑剂选择和润滑部位处理两方面.
采用流体润滑剂可获得较稳定的摩擦系数和较小的摩擦噪声,但工作温度范围窄,真空下蒸发损失制约着工作寿命.
采用固体润滑剂应用温度范围较宽,没有蒸发损失问题,但存在润滑膜磨损.固体润滑装置的摩擦磨损测试包括润滑剂的标准化试验和应用试验,后者是任何润滑机构都必须进行的[5].
还可以采用固液混合润滑方式以综合利用二者各自的优点,但需注意润滑剂间的兼容性,而且并不能因此而改善流体润滑剂的温度特性.
润滑部位包括轴承和谐波减速器内部的多个摩擦副.轴承内部包括滚动体(球)与套圈沟道、滚动体与保持器以及保持器与内外套圈挡边等摩擦副.谐波减速器中包括柔性轴承内部的摩擦副、刚轮与柔轮的齿啮合摩擦副以及柔性轴承与柔轮间的摩擦副.轴承中的摩擦以滚动摩擦为主,而谐波传动中以滑动摩擦为主.润滑设计需保证所有的摩擦部位在全寿命阶段能获得充分的润滑.
2.2.3 高精度指向
中继卫星星间链路天线具有天线口径大、波束窄、指向精度高等特点,指向精度指标是GDA的关键指标,也是系统设计与实现的一个难点.系统指向误差由天线馈电部分指向误差和机械部分指向误差两个部分构成,其中机械部分误差由双轴定位机构指向误差、结构热变形误差、装配误差三个主要部分构成[6].为了保证指向精度,基于谐波传动的GDA在设计中还应关注如下因素:
1)谐波传动减速器的传动精度及空回:主要是由刚轮和柔轮的齿形误差、周节误差以及啮合间隙引起的,还会受到润滑方式的影响.尤其在选用固体润滑方式时,由于润滑剂存在磨损,应考虑可靠传动、充分润滑和保证传动精度等三者之间的匹配.
2)传动系统的结构刚度:包括弯曲刚度和扭转刚度.机构设计中一般由专门的轴系承受弯曲载荷,所以弯曲刚度不存在薄弱环节.而选用谐波传动方式,由于柔轮是必需的,所以这一柔性环节是不可避免的.适当地缩短柔轮杯体长度或加大壁厚可以提高扭转刚度.
3)星体连接支架、天线连接支架以及双轴连接支架的结构刚度;这需要协调支架重量与结构刚度之间的关系,保证足够的弯曲和扭转刚度,并实现轻量化.
3 长寿命验证试验方案
长寿命验证的重点是谐波减速器的摩擦磨损状况,包括磨损对传动精度、空回的影响以及寿命末期传动效率的变化.
采取固体润滑方式的机构可以进行加速寿命试验.加速因子主要选择提高运转速度以缩短试验周期,另外还可以加大温度范围和负载扭矩以增加考核的严酷度.加速因子选择的原则是不能改变验证环节的失效机理.
寿命试验应在真空环境下进行,机构运动方式应参照在轨实际运行的方式进行,运行寿命一般按在轨寿命加倍进行,预计的循环数在1001~100000个循环的按2倍进行,大于100000个循环的按1.25倍进行[7].
试验过程中的主要监测项目包括轴承、电机、旋变等的温度,传递效率,负载力矩等.传动精度、空回等测试项目一般在真空罐外采取光学或多齿分度台的方法标定,所以需要中断试验或试验停止后进行.试验后进行试验机构的解剖检查和分析.
图8是一种可施加扭矩负载的真空寿命试验系统,可用于单轴驱动器寿命试验.试验设备主要包括真空罐、磁流体密封装置、磁粉制动器、GDA驱动控制装置、温度测量装置等.
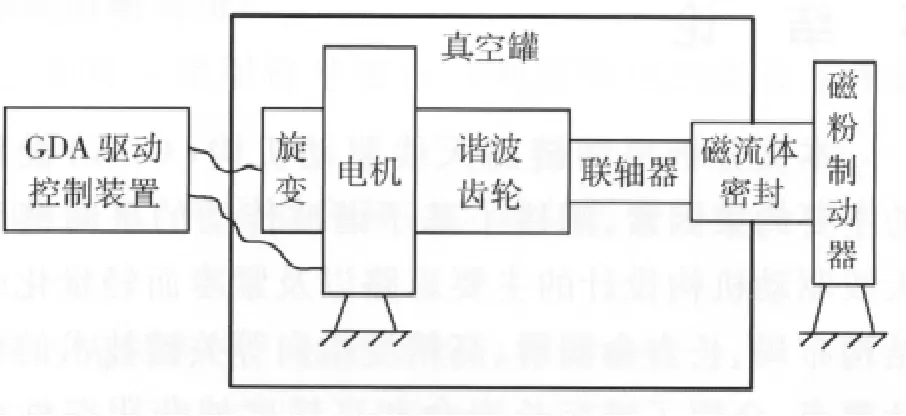
图8 一种可施加扭矩负载的真空寿命试验系统Fig.8 Vacuum life test system with applied twist torque load
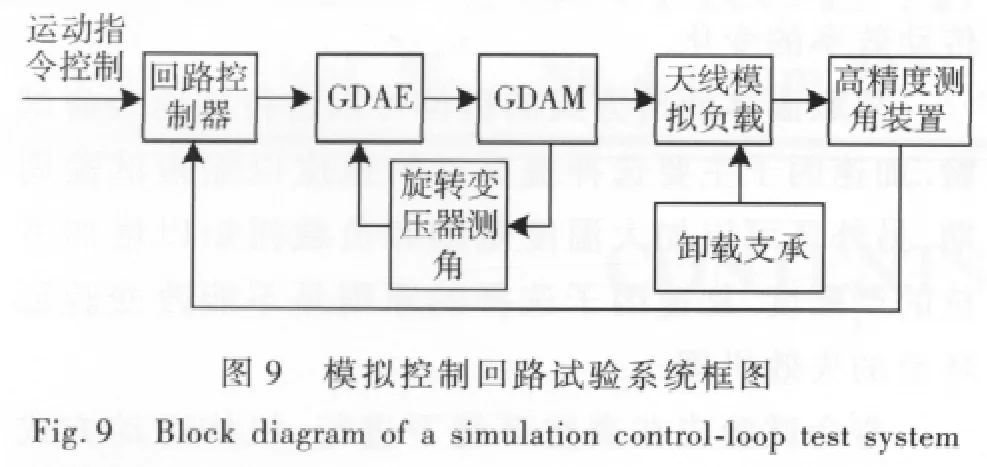
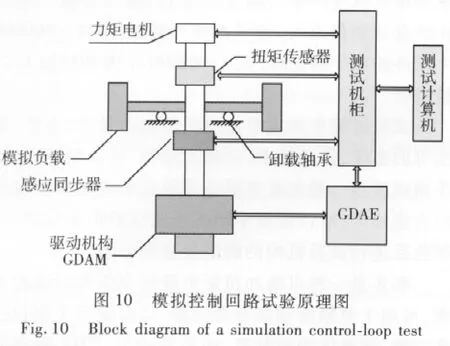
4 高精度捕获跟踪验证试验方案
可采用模拟天线指向控制回路的方式进行试验验证.试验系统包括 GDA单轴驱动器(GDAM)、GDA驱动线路(GDAE)、天线模拟负载、回路控制器、高精度测角装置以及扭矩传感器、力矩电机、卸载轴承等.通过该试验可以测试、验证GDA单轴驱动器带模拟负载下的动力学特性,分析其对天线指向控制的影响,以及验证天线指向控制方案等,并可以得到GDA的测角精度、控制精度、单步运动响应特性和驱动机构动力学特性模型.试验系统框图和原理框图如图9~10所示.
5 结论
本文分析星间链路天线驱动机构(GDA)设计的主要约束因素,阐述了基于谐波传动的星间链路天线驱动机构设计的主要思路以及紧凑而轻量化的结构布局、长寿命润滑、高精度指向等关键技术的设计要点,介绍了进行长寿命和高精度捕获跟踪性能试验验证的方案,可供开展长寿命高精度天线驱动机构设计时参考.
[1] 王典军,曾海波,关轶峰.跟踪与数据中继卫星控制系统技术[J].航天控制,2005,23(3):83-90 Wang D J,Zeng H B,Guan Y F.Technique for control system of tracking and data delay satellites[J].Aerospace Control,2005,23(3):83-90
[2] 崔赪旻,王典军.跟踪与数据中继卫星星间链路天线驱动机构技术综述[J].空间控制技术与应用,2010,36(5):32-37 Cui C M,Wang D J.Survey of gimbal drive assembly mechanism of inter-orbit link antenna for tracking and data relay satellites[J].Aerospace Control and Application,2010,36(5):32-37
[3] 李克美.谐波传动的原理特点及应用[J].设备管理与维修,2006(8):29-30 Li K M.Principle features and application of harmonic drive[J].Plant Maintenance Engineering,2006(8):29-30
[4] 李克美.谐波传动的原理特点及应用(续)[J].设备管理与维修,2006(9):28-29 Li K M.Principle features and application of harmonic drive(continuous)[J].Plant Maintenance Engineering,2006(9):28-29
[5] Peter L C.Space vehicle mechanisms-elements of successful design[M].John Wiley& Sons Inc.1997
[6] 孙京,马兴瑞,于登云.星载天线双轴定位机构指向精度分析[J].宇航学报,2007,28(3):545-550 Sun J,Ma X R,Yu D Y.Pointing accuracy analyses of a satellite two-axes antenna pointing mechanism[J].Journal of Astronautics,2007,28(3):545-550
[7] ECSS.ECSS-E-30 part 3A Space engineering mechanical-part 3:mechanisms[S].ECSS-E-30 Part 3A ,2000
