SA866在VVVF调速系统中的应用
2012-04-10李瑾
李 瑾
LI Jin
(南昌工程学院 机电学院,南昌 330099)
0 引言
电机交流变频技术是一种将功率和控制综合应用的技术。在变频器技术中最重要的是SPWM脉冲的产生,通常采用的方法有模拟法和数字法,数字法的实现一种是利用微处理器计算查表得到,常需复杂的编程,另一种是利用专用集成电路(ASIC)来产生PWM脉冲,不需或只需少许编程,使用起来极为方便。用于产生PWM 波的专用大规模集成电路芯片主要有 HEF4752,SLE4520,MA818 和 8XC196MC等,但它们都需要比较复杂的外围控制电路或是需要借助于微处理器才能构成运动控制系统。由M IT EL公司推出的三相PWM运动控制芯片SA866是一种全数字化高智能的PWM控制器,其接口简单,工作中无需微处理器,许多重要的运行参数可在器件初始化时编程设置,非常适于用在通用变频器及高性能变频调速系统中。
本文设计了一种以专用集成芯片SA866为控制核心的新型全数字化三相SPWM变频器,它采用IGBT作为主功率器件,充分利用其外围电路简单、具有多种波形选择、无需其它处理器配合的特点,采用这种变频器,可以得到相当接近正弦波的输出电压,并能使功率因数接近于1,同时只要通过对输出脉冲宽度的控制就可以改变输出电压,大大加快了变频器的动态响应。
1 SA866AE的特点及原理框图
SA866是专为感应电机的PWM控制设计的一款集成电路,其内部包含了波形、频率、幅值等控制信息,控制实行全数字化,重复性好,无温漂,无时漂。SA866AE 采用异步不对称规则采样的调制方法,脉冲调制信号是通过比较输入参考波形和高频载波得到的。三角波(载波)由 1个上/ 下计数器合成,并通过数字比较器和输入参考波形进行比较。SA866为用户提供的参考波形以数字形式存在内部的ROM 中,有3种形式:纯正弦波、三次谐波、带死区三次谐波。PWM波形最终输出三对互补信号分别驱动三相逆变桥的上下开关器件。脚SETPIONT给定的电压决定了电源工作频率或电压的幅值,经一快速10位A/D转换器转换后的数字量作为加速/减速单元电路的目标频率或电压值。加减速时间分别由外围RC决定。内部电源频率是一个十六位数字量,因此,它比十位的给定频率更能平滑地加速和减速。输入端Vmon和Imon也可控制加速/减速,当Vmon或Imon信号有效时,不论正常的频率如何变化,可以强制使加速率或减速率为O,防止功率开关管被冲击,实现对开关管的过流和过压保护。外部中断输入脚TRIP允许一有效高电平迅速关断PWM输出,当输入高电平时,PWM输出被封锁。只有通过复位输入才能恢复工作。方向控制DIR端可以使输出的对称三相PWM波某两相转换相序,实现反转。
SA866具有调频调速范围宽以及无噪。
2 系统工作原理
整个系统采用三相全桥整流,然后通过三相逆变器将整流后的直流电转换为可进行压频协调控制的交流电压。图2所示为采用SA866作控制芯片的变频调速系统电路图,实现VVVF开环控制。系统的控制由SA866独立实现,无需与微控制器相配合。保护电路主要有:驱动电压欠压保护、直流声运行的特点,当时钟频率为25MHz时,载波频率最高可达24kHz,输出频率可达4kHz,其输出频率以及加速减速的快慢都可由外接电位器在线连续调节。所有需定义的参数如载波频率、死区时间、最小脉宽、调制波形、V/F曲线等均存储在外接的串行EEPROM中,上电时自动读入SA866中。SA866有6种工作模式,它可以变频变幅,也可以定频变幅;可以独立运行,也可与微处理器配合使用,基本做到了低价格多功能,在许多逆变领域均可采用。它除了能产生合乎要求的PWM脉冲外,还集成了完备的过流、过压保护功能,并可在紧急情况如短路、过热时快速关断PWM脉冲,保护逆变器和电机。其原理框图如图1所示。
侧电压过压保护、过载保护和短路保护等。在作为三相变频器使用的时候,SPWM控制电路输出六路PWM波形,分别控制三相逆变桥的六个IGBT。调节给定频率,电机的转速就会随之变化。变频器工作在0~80Hz的范围内,其中设定50Hz为基频,即电机从0Hz到50Hz变化时,输出电压是遵循压频比协调变换的,此时系统工作在恒转矩区;当频率超过50Hz,输出电压不再上升,此时系统工作在恒功率区。
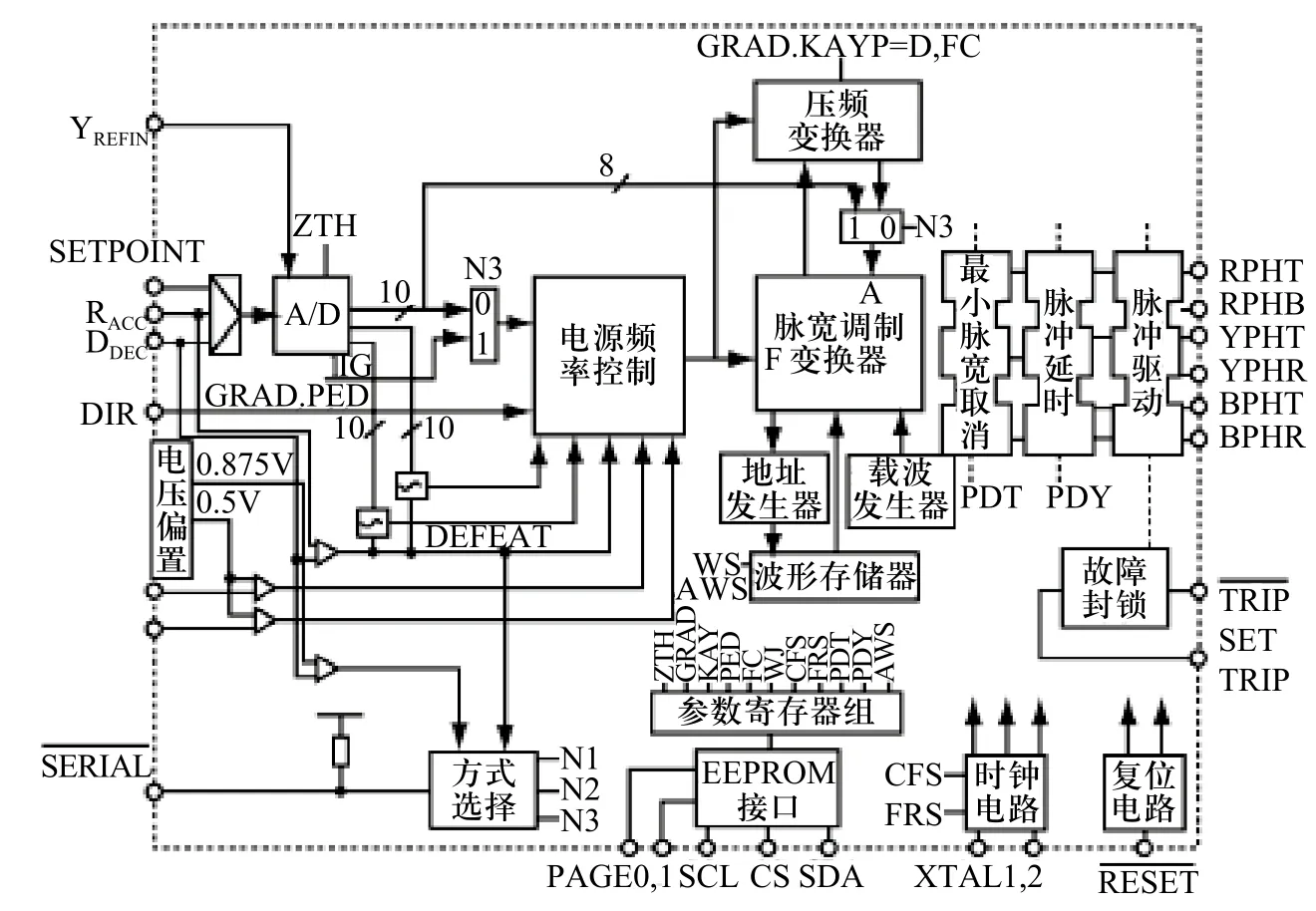
图1 SA866标准工作方式的原理框图

图2 SA866作控制芯片的变频调速系统电路图
3 主电路的设计
主电路由整流,滤波和逆变电路三部分构成。为了减小成本,整流部分采用三相桥式不控整流电路,电路简单、可靠且无需控制电路驱动,缺点是纹波较大,需采用较大的滤波电容。这里用工频变压器将三相交流电降为相电压127V的交流电送到整流电路,整流后的平均电压是Ud=1.35,UL= 1.35×1.732×127= 297V,再用一1000uF/450V的电容用于滤平整流后的电压纹波;另外当负载变化时,它可使直流电压保持平衡。
4 控制部分设计
4.1 加减速控制逻辑的实现
加速/减速单元包括一个17位up/down计数器,一个16位的幅值比较器。计数器的时钟和外接的加速或减速RC振荡器的时钟同步,加速/减速速率可分别由外围的RC振荡器决定。两个回路的电阻和电容值可以相同,也可不同,从而可以产生相同或不同的加速/减速时间。
从0Hz加速到由频率范围确定的最大频率的时间,或反之由最大频率减速到0Hz,所需的时间由下式给定:

加速/减速振荡器输出控制着加速/减速信号,递增或递减频率。计算过程流程图如图3所示。

图3 加、减速控制逻辑流程图
计数器是一个同步up/down计数器,复位以后,瞬时方向和频率分别被迫变为正向和0,只要给定频率等于0,则瞬时频率就会变为0,同时相输出被禁止(强迫为0)。如从此状态开始启动(同刚上电后的状态)上桥臂输出暂时禁止,而下桥臂在PWM恢复输出前的整个载波周期成高电平。在此期间完成对自举驱动电路中上桥臂电容的充电,但不会产生短于脉冲取消时间的脉冲。
4.2 控制软件的实现
工作于标准方式的SA866AE,软件设计比较简单,只要根据系统指标要求,驱动电路参数,开关管参数,就可以确定出设计参数,进行编程。在这种工作模式下,需要编程的参数总共有7个,包括载波频率(CFS)、电源频率范围(FRS)、脉冲延迟时间(tPDY)、脉冲取消时间、波形选择、电压/频率控制参数(GRAD,KAY,PED,FC)、A/D输入门槛电压。
系统应用的时钟频率8MHz,载波频率7.8125kHz,调制频率范围0~81.4Hz,最小脉宽3μs,死区时间5.1μs。计算过程如下:
1)确定CFS n=f,所以由式
确定fCARR=7812.5Hz,则CFS=000。
2)确定FRS m=2,所以由式

确定fRANGE=81.4Hz,则FRS=010。
3)确定 PDY tPDY= 5μs,由式
所以PDY=35.4,取35,则PDY=100011,实际死区时间为5.1μs。
4)确定 PDT 由于 tPD-tPDY= 3μs ,得tPD=tPDY+ 3 = 8.1μs,由式

得PDT=1010010。实际的最小脉宽为8.1-5.1= 3μs。
5)确定V/F曲线控制字 因为是恒转矩负载,所以FC=0。Pedestal取3.1%,则由

得PED=00001000。令fBASE=50Hz,则
由

得GRAD=25.1,取GRAD=25,即为00011001。
6)确定其余选择字 波形采用正弦波和三次谐波型,所以WS=00或01,AWS=0000;零频阈值电压为0,所以ZTH=00;KAY未用,所以取为00H,正弦波时所有选择字中‘1’的个数为15,所以CHKSUM=111。
上面这些参数以页为单位存入外接的EEPROM中。SA866的微线型三线串联接口可与256位或者1024位的串接微线总线型EEPROM兼容,例如93C06或93C46。所有存在EEPROM的参数在复位以后通过串联接口自动下载。所以采用的EEPORM必须要具有地址自动增量的功能,这样不需要连续触发CS就可以使初始化参数一位一位地从EEPROM下载到控制芯片中。本系统中我们采用MICROCHIP公司生产的型号为93LC46B的EEPROM,实际应用中只用了它的低256位,它的存储地址共分为4页,每页为4个16位字,每页应用中包含一套初始化参数。通过SA866给EEPROM发出的起始地址命令及所读取的位数选择,因此可以有4套初始化参数可供选择。复位以后通过页选端来确定选用哪一套参数。
5 结论
本文给出了一种采用PWM控制器SA866和IGBT组成的变压变频(VVVF)调速系统,只要改变参数设置就可以改变系统性能,具有较高智能的控制保护功能。系统控制电路简单,使用方便,成本低,可靠性高。由SA866构成的变频系统输出电压频率稳定度高,总谐波含量少,低速运行特性好,因此适用于通用变频器及高性能变频调速系统的设计。
[1] 张红莲. 基于SA866AE的VVVF调速系统的设计[J]. 变频器世界,2009,8.
[2] 杨庆江,焦文良. 三相 PWM 波形发生器 SA866AE在交-交变频器中的应用[J]. 工矿自动化,2003,2.
[3] 高国兴 ,荣聚弟 ,李银生. 以SA866AE 为核心的变频装置[J]. 电气时代,2006,8.
