掘进机可视化运行监控系统的研究
2012-04-10赵汗青王立新李海燕臧建所
赵汗青,王立新,李海燕,臧建所
ZHAO Han-qing,WANG Li-xin,LI Hai-yan,ZANG Jian-suo
(黑龙江科技学院 机械学院,哈尔滨 150027)
0 引言
随着矿山机械化作业水平的不断提高,采用悬臂式掘进机进行巷道的开采已是一项非常有效的开采手段[1]。然而大多数悬臂式掘进机仍是手工操作[2],由于在巷道开采操作过程中粉尘比较大,在实际操作时由1名司机和2名辅助工人来共同完成,司机负责掘进机的操作,另外两名工作人员负责巷道在掘进时左右两侧的超挖和欠挖的看护工作,司机和工作人员劳动强度较大,舒适性较差,劳动生产率低,而且施工质量和施工安全很大程度上取决于人为因素,因事故而伤亡的人数也较多[3],因此急需加强掘进机截割过程的智能化研究[4]。这里对掘进机的截割过程进行可视化监控,司机可以通过操作屏看到截割头的位置,无需辅助工人的帮助即可完成巷道的截割工作,降低了工作人员的劳动强度,提高了掘进机的施工质量和工作效率。
1 监控系统的组成及硬件设计
1.1 断面成形原理与监控系统的组成
悬臂式掘进机在巷道的掘进工程中是通过截割头的旋转和截割臂的上下左右摆动来实现航道的断面的成形控制[5]。截割臂的上下摆动是由一对升降油缸控制的,且在升降过程中摆动角度一致[6,7],因此,可以在其中一个油缸的转角处安装角位移传感器进行摆臂的升降角度检测,从而确定截割头在截割断面中的上下位置。截割臂的左右摆动是由一对水平油缸推动回转台左右摆动,从而带动截割臂的左右摆动, 因此可以通过测量旋转台的角度确定截割臂的左右摆动的大小,将角位移传感器安装在旋转台处。掘进机截割监控系统的组成如图1所示。
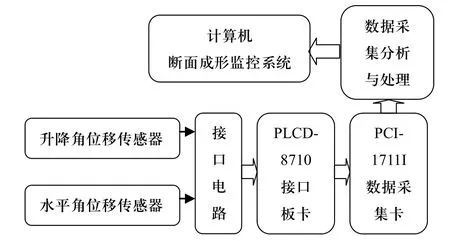
图1 掘进机监控系统组成
1.2 硬件接口电路
从图1可以看出,为确定掘进机在断面成形过程中采用两角位移传感器,这里采用增量式码盘。增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相; Z相为每转一个脉冲,用于基准点定位。A、B两组脉冲相位差 ,可通过比较A相在前还是B相在前,以判别编码器的正转与反转。采用如图2所示的方向辨别电路。
当光电编码器顺时针旋转时,通道A输出波形超前通道B输出波形90°,D触发器输出Q为高电平,为低电平,上面与非门打开,计数脉冲通过,进行加法计数,此时,下面与非门关闭,其输出为高电平。当光电编码器逆时针旋转时,通道A输出波形比通道B输出波形延迟90°,B触发器输出Q为低电平,为高电平,上面与非门关闭,其输出为高电平;此时,下面与非门打开,计数脉冲通过,进行减法计数。即当码盘正向旋转时,计数器增加,当码盘反向旋转时,计数器值减少,因此,可以通过减计数数值来确定截割臂实际旋转的角度值。
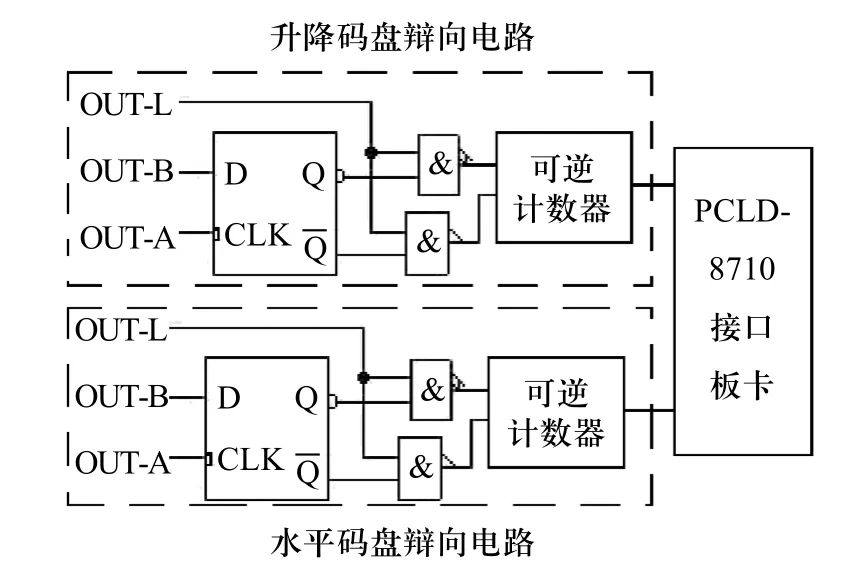
图2 码盘接口辩向电路
2 软件设计
2.1 监控系统软件总体结构设计
为实现截割轨迹的可视化,本系统中采用Visual Basic 6.0可视化语言进行程序设计。Visual Basic是微软公司推出的一种可视化、面向对象和采用事件驱动方式的结构化高级程序设计语言,被公认为是编程效率较高的一种编程语言。本系统在软件设计方面主要有可视化界面设计、数据采集与处理、数据的存储、断面超挖报警、使用帮助系统。断面超挖报警是掘进机在断面成形过程中出现超挖时,系统会发出声光报警,提醒操作者。数据的存储是为后续研究记忆截割以及分析数据做准备。帮助系统是为方便使用者设计的,对软件的使用进行介绍。
2.2 截割工艺路线的形式
掘进机在开始截割工作时,首先利用工作机构深锁装置或开动履带行走机构,使截割头切入工作面煤(或岩)壁一定深度(截深),然后通过截割头的水平摆动和垂直摆动,即可切割出所要求的巷道断面形状。断面形状有拱形、矩形和梯形。以截割梯形断面为例进行说明,常用工作面的切割程序如图3所示。
图3(a)为常规切割程序,即从下向上按图中所示的切割路线进行切割。为了减小截割时阻力,减小应力对截割头的作用,以增加截割头的使用寿命,可以采取图3(b)、(c)的截割方式。图3(b)从中间先向下切割,完成下部的断面尺寸后,再从中间向上切割完成上半部分断面的截割。图3(c)为从中间按图中扇面的形式切割,最后完成轮廓边缘尺寸的修剪。图3(d)所示的情形是煤岩分层的情形,先截割煤,后截割岩石,以减小岩石应力过大对机器造成损害。
2.3 超挖报警程序的设计
从图3可以看出切割程序的形式各不相同,为简化程序设计,减少运算工作量,采用了统一的方法控制断面的极限尺寸,抛开截割工艺方式的限制。其程序框图如图4所示。
3 试验研究
3.1 试验系统组成
本实验系统以EBZ100E悬臂式掘进机为原型,制作了掘进机的模型的进行了实验研究,模型是按照1:10的比例制作。实验装置如图5所示,包括掘进机模型、传感器、计算机、PCI-1711L数据采集卡、PLCD-8710接口卡和相关的测试仪器。
3.2 程序的测试
由前面的程序设计生成执行文件,该试验系统设计了常规的三种截割断面形式,即梯形断面、矩形断面、拱形断面。可以根据实际开采巷道的要求,选择其中一种断面截割形式。其中任何一种断面断面截割形式,都可以依据实际情况设置断面的大小,如图6所示。
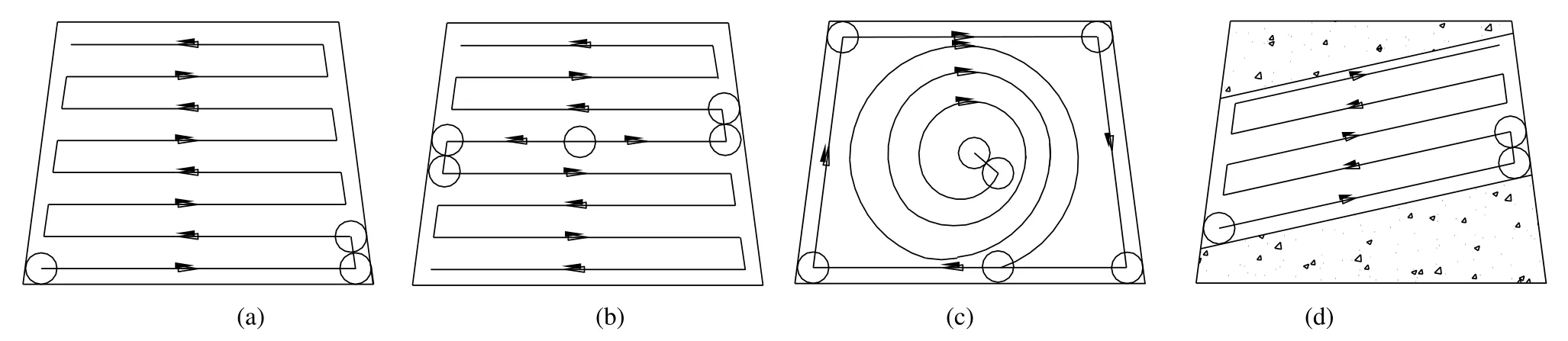
图3 截割工艺路线图
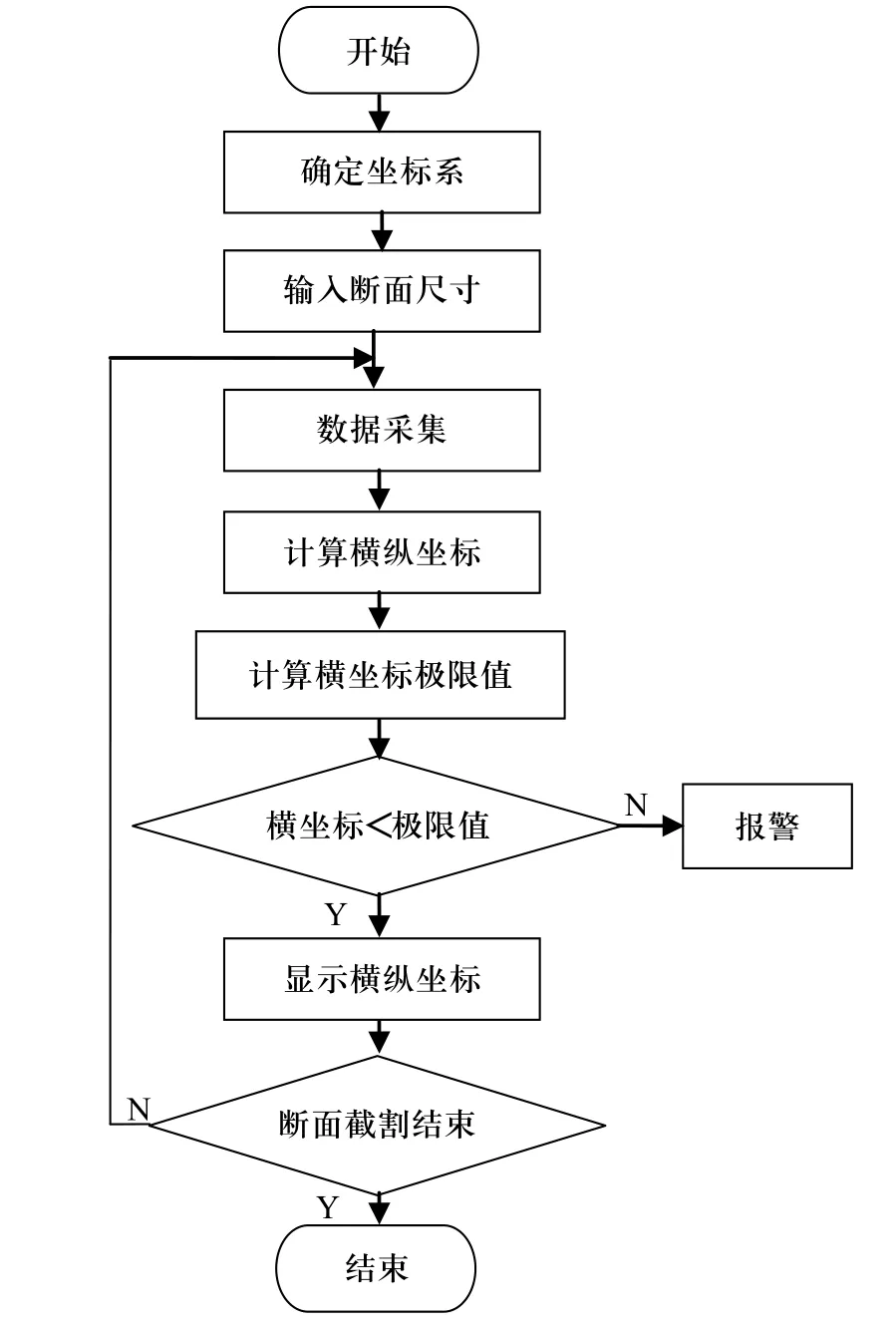
图4 数据采集程序框图

图5 实验装置图
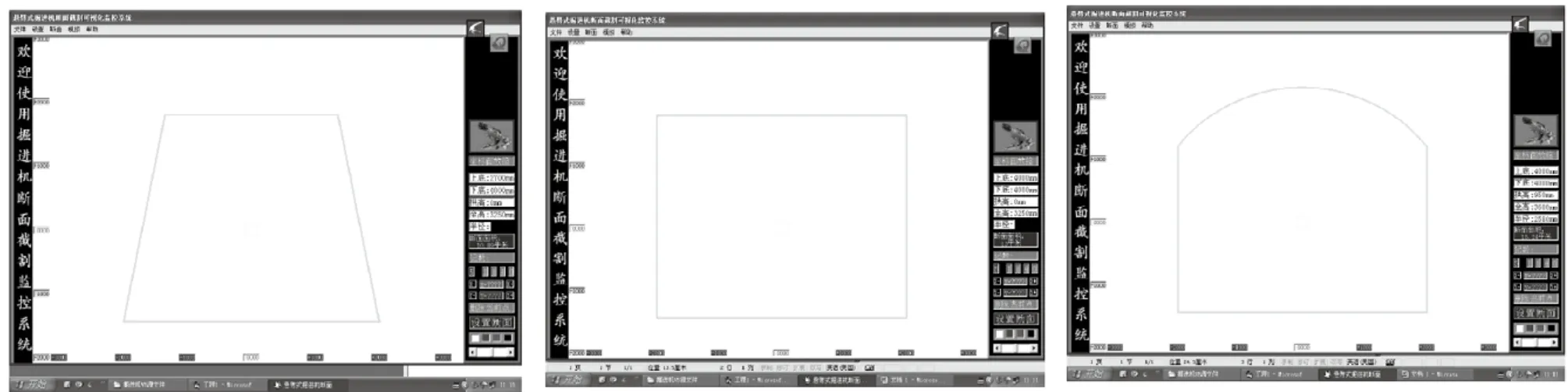
图6 断面开凿形式
本系统的动态连接程序由两个模块组成,分别为drive.bas和global.bas,用来驱动程序和变脸的定义程序。系统的断面成形监控画面在图5中可以看出。在监控系统的左部是监控系统的名称,中间即主题部分,显示截割过程的轨迹,在右侧有很多辅助功能,共使用者参考,如截割断面的面积大小,截割头在时时截割过程中的坐标值显示。由于现场光线条件等,这里设置了四种监控背景颜色,以适应实际现场条件的需要。当然,也可根据实际要求设置断面的画面颜色。
4 结束语
利用PCI总线技术,开发了以PC计算机为核心,以VB的可视化功能为技术手段的悬臂式掘进机运行监控系统。在设计过程中,采用模块化设计思想,对掘进机的截割断面形式、报警系统、数据存储、截个监控画面进行了设计。该系统可以降低操作人员的劳动强度,提高断面成形的质量。
[1] 李建刚,毛君,李惟慷,等. 悬臂式掘进机仿形截割控制机理研究[J]. 辽宁工程技术大学学报,2009,28(4): 621-624.
[2] 赵汗青. 基于C7-636的悬臂式掘进机截割过程可视化监控系统[J]. 工矿自动化,2008(6): 16-18.
[3] 曲秀敏,等. PLC在国产重型掘进机电控系统中的应用[J]. 佳木斯大学学报(自然科学版),2003,3: 92-94.
[4] 李建刚,毛君,李惟慷. 基于MSP430F449单片机的掘进机器人悬臂转角检测[J]. 制造业自动化,2011,33(7): 14-16.
[5] 穆晶,杜毅博,田劼,李睿,吴淼. 悬臂式掘进机截割断面极限位置分析[J]. 工矿自动化,2011(10): 67-69.
[6] 邓国华. 基于激光导向器的悬臂式掘进机位置姿态自动测定方法[J]. 工矿自动化,2009(9): 21-23.
[7] 赵学雷,杜向阳,屈小兵,李卫涛. 悬臂式掘进机自动纠偏技术研究[J]. 煤矿机械,2010,31(7): 38-40.
