基于ADAMS抓斗挖泥船吊臂刚柔混合模型动态特性研究*
2012-03-17肖新华徐赐军蒋超平
肖新华 徐赐军 蒋超平
(1湖北理工学院机电工程学院,湖北黄石435003;2三一集团,湖南长沙410000)
建立抓斗挖泥船吊臂动力学仿真模型,对抓斗挖泥船吊臂进行仿真分析,为抓斗挖泥船的吊臂设计提供依据,促进大型抓斗挖泥船的吊臂设计和建造技术的发展,提升行业水平,满足清淤治理工程的需求。构件的模态是构件本身的一个固有物理属性[1],一个构件一旦制造出来,它的模态就是自身的一种属性。在将一个构件离散成有限元模型时,要对每个单元和节点进行编号,以便将节点的位移按照编号组成一个矢量,该矢量可以由多个最基本且相互垂直的同维矢量通过线性组合得到,最基本的矢量就是构件的模态。
本文在有限元分析软件MSC.Nastran中建立吊臂的有限元模型,并进行模态分析,获得相应的模态参数,得到吊臂模态中性文件,为抓斗挖泥船刚柔混合模型的建立奠定基础。
1 吊臂模态分析
MSC.Nastran软件是一个具有高度可靠性的结构有限元分析软件,其功能覆盖了绝大多数工程应用领域,并为用户提供了方便的模块化功能选项。MSC.Nastran软件的主要功能模块有:基本分析模块(含静力、模态、屈曲、热应力等)、动力学分析模块、非线性分析模块、优化模块、DMAP用户开发工具模块及高级对称分析模块。除模块化外,MSC.Nastran软件还按解题规模分成10 000节点到无限节点,用户引进时可根据自身的经费状况和功能需求灵活地选择不同的模块和不同的解题规模,以最小的经济投入取得最大的经济效益。
在MSC.Nastran软件中求得吊臂的前10阶模态,并自动生成网格,划分网格,划分网格后的吊臂有限元模型如图1所示。各阶模态对相应的贡献量不同,贡献量与激励的频率及结构有关,一般情况低阶模态比高阶模态贡献量大。通常,模态的贡献量随频率的增加而减小,结构中只有少数较低的模态容易被激发,高阶模态不易被激发。
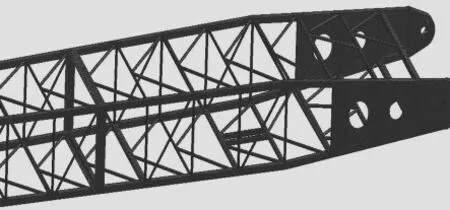
图1 吊臂有限元模型
本文采用最简单的模态截断法,直接对构件的模态进行截断,除去高阶模态,提取前10阶模态[2],模态分析结果如表1所示。由表1可以看出,抓斗挖泥船的柔性吊臂在较低频率范围内包含了较多的模态,这进一步表明吊臂柔性对抓斗挖泥船动态特性有很大的影响,因此吊臂柔性不容忽视。
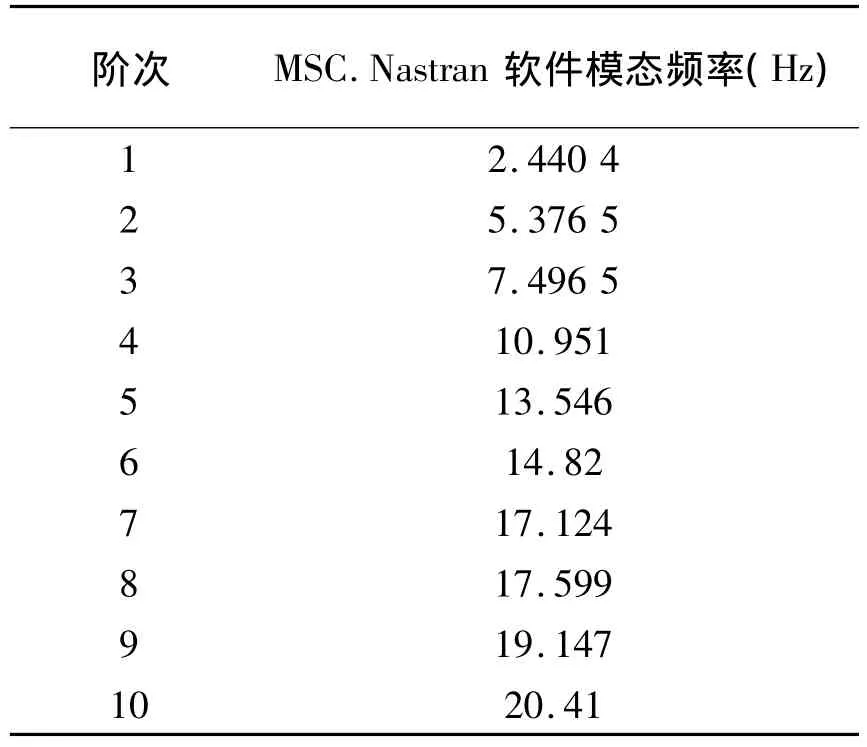
表1 模态分析结果
吊臂有限元建模是指在对吊臂进行有限元建模时对吊臂结构作如下简化:去除对整体动态特性影响不大的小筋板。吊臂头部刚度与吊臂整体相比大很多,所以将吊臂头部视为刚体处理,将吊臂头部去掉,对余下部分进行柔性化,最后在ADAMS环境下通过外联节点将其与头部再连接起来。同时对单元及材料参数进行设置,定义材料特性,比如密度、泊松比、弹性模量等,再选择适当的单元类型来划分网格。定义材料特性时应注意各个物理量的单位,由于有限元软件 MSC.Patran中没有单位的概念,因此需要在同一个问题中将各物理量的单位统一。
2 柔性体生成与刚柔混合模型的构建
吊臂的模态分析过程与一般模态分析过程相比有几个需要特别注意的地方:一方面在有限元模型建立过程中必须注意柔性体部件与其他外部构件之间的连接问题,一般采用建立外联节点的方法来实现,在ADAMS软件中通过外联节点对吊臂和与其相连的刚体之间定义约束和施加载荷;另外在开始模态分析之前还需要对ADAMS软件输出作相关特殊设置,以确保输出正常的MNF文件,否则MNF文件导入ADAMS软件后零件尺寸会被放大,与实际不相符。替换后的吊臂柔性体如图2所示,从图2可以看出在外联节点处自动生成了相应的MARK,它用来添加约束和加载[3]。
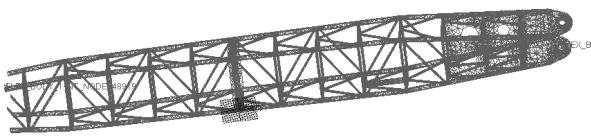
图2 吊臂柔性体
柔性体加载后除了添加约束和施加载荷外,还需进行编辑。柔性体没有质量和惯性矩的概念,因此不需要给柔性体赋予质量信息,对柔性体最大的编辑就是决定使用哪阶模态参与运算。在模态初始状况对话框中可以先选中某阶模态,然后使其失效或激活,也可以使某个范围内的模态失效或激活。
吊臂模态 MSC.Nastran计算结果及其向ADAMS软件转换结果如表2所示,通过查看模态的振型,决定哪些模态对计算结果不作贡献,然后使其失效,以便在不影响仿真结果的基础上减少仿真时间。

表2 吊臂模态MSC.Nastran计算结果及其向ADAMS转换结果
3 抓斗挖泥船刚柔混合动态特性分析
将吊臂柔性化后得到抓斗挖泥船刚柔混合仿真模型,在考虑吊臂弹性特性的基础上对抓斗挖泥船进行仿真分析,分析吊臂柔性对抓斗挖泥船动态特性的影响。
3.1 标准作业动态特性分析
吊臂铰点力、抓斗在船舶纵向平面内摆角和抓斗在船舶横向平面内摆角分别如图3~5所示。对比多刚体动力学分析结果,不难发现在抓斗启动后几秒内和从第 20 s开始直至结束,钢丝绳张力二者基本一致,但从第5 s到第20 s之间却出现了较大的差异,这表明吊臂柔性对这一阶段有显著影响。吊臂铰点力的情形与钢丝绳张力类似。抓斗摆角的峰值与前面结果基本一致,但曲线规律有了变化。从开始到第40 s,抓斗在船舶横向平面内摆角趋于平缓;从第40 s到第80 s,抓斗在船舶纵向平面内摆角趋于平缓[4]。表明吊臂运动与抓斗运动的耦合使抓斗摆角更加缓和,也进一步说明了吊臂柔性对挖泥船抓斗机动态特性的影响不容忽视。

图3 吊臂铰点力

图4 抓斗在船舶纵向平面内摆角
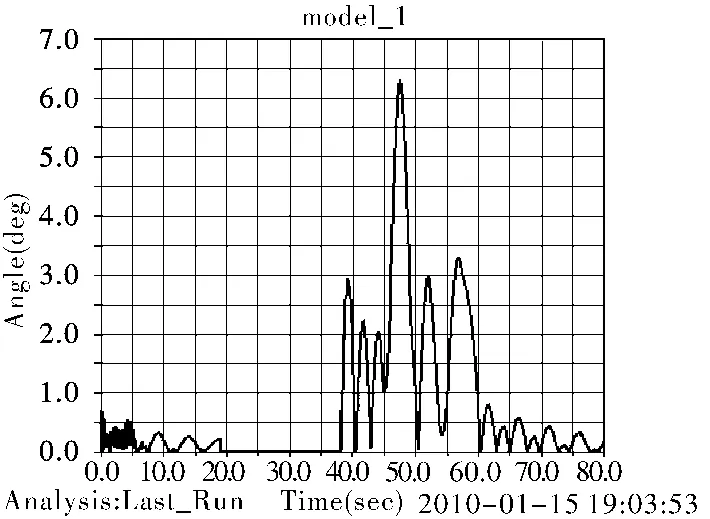
图5 抓斗在船舶横向平面内摆角
3.2 吊臂俯仰动态特性分析
抓斗在船舶纵向平面内摆角和钢丝绳张力分别如图6~7所示。对比多刚体动力学分析结果,抓斗在2个平面内的摆角与吊臂柔性化前基本一致,幅值略有增大。吊臂铰点力和钢丝绳张力幅值与吊臂柔性化前基本一致,但变化趋势有些差异。
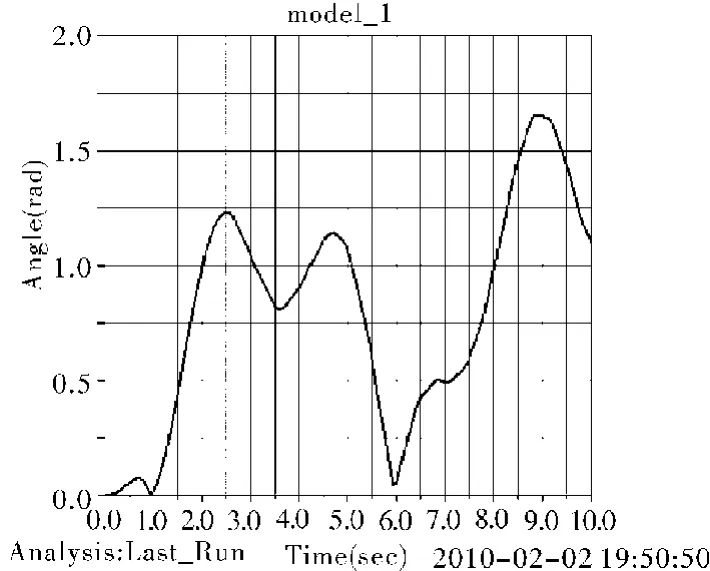
图6 抓斗在船舶纵向平面内摆角
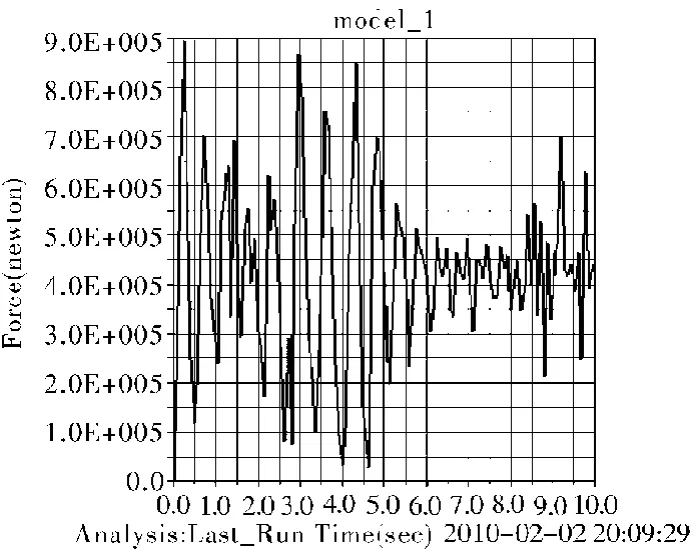
图7 钢丝绳张力
4 结论
本文分析了在ADAMS软件环境下柔性体生成方法,通过对吊臂进行模态分析并将其柔性化,在此基础上建立起抓斗挖泥船刚柔混合仿真模型。对多个典型工况进行了仿真分析,并与多刚体动力学仿真分析结果进行了对比,发现吊臂柔性对抓斗在2个平面内的摆角影响很小,而对吊臂铰点力和钢丝绳张力有较大的影响。
[1] 余龙,王娟.半潜式平台深水锚泊系统三维时域动力分析[J].中国海洋平台,2007(6):34-37
[2] 杨宝林.基于虚拟样机技术的船用起重机金属结构动力学仿真[D].武汉:武汉理工大学,2008
[3] 苏文力.基于虚拟样机的抓斗卸船机结构动力学仿真研究[D].武汉:武汉理工大学,2007
[4] 李建.基于虚拟样机技术的斗轮挖掘机动态性能分析[D].大连:大连理工大学,2007
