基于单目视觉的跟驰车辆车距测量方法
2012-03-13余厚云张为公
余厚云 张为公
(1 南京航空航天大学机电学院,南京210016)
(2 东南大学仪器科学与工程学院,南京210096)
车辆跟驰是道路上最基本的一种微观驾驶行为,车辆在跟驰阶段面临的威胁主要来自横向的车道偏离和纵向的车辆碰撞.其中,车辆在跟驰过程中的纵向碰撞主要是追尾碰撞,造成车辆追尾的原因通常是由于本车车速过快、未与前方车辆保持一定的安全距离,因此前方车辆车距测量对于车辆防追尾碰撞来说意义重大.
目前常用的障碍物测距手段主要包括超声波[1]、雷达[2-3]、激光[4-5]以及机器视觉[6-7]等.其中,超声波测距受外界温度影响较大,雷达测距会受其他雷达装置以及通信设备等的电磁波干扰,测量精度均难以得到保证.而激光测距虽然精度较高,但当前方车辆距离较远时,激光束在本车行驶过程中的方向改变可能会造成被测目标丢失.另外,超声波等主动型传感器在车辆类型、尺寸信息获取及车道检测等方面无能为力,信息量的匮乏也限制了其在车距测量中的实际应用.
视觉是行车过程中驾驶员获取道路场景中交通标志、交通信号、车道线标记等信息的主要来源,并且周围车辆与本车之间的距离及相对速度也是驾驶员通过视觉来进行估计的.因此,采用机器视觉方式测量前方运动车辆的距离,所得到的信息量最大,也最贴近驾驶员的实际感知.
1 车辆制动模型
在跟驰车辆防追尾碰撞系统中,前车与跟随车辆之间应保持多大的安全车距取决于驾驶员的反应速度、操作熟练程度及车辆性能和道路条件等.从驾驶员得到前车制动信息开始,到本车停车为止,整个刹车避撞过程可划分为以下几个阶段[8]:
1)驾驶员反应时间tr指驾驶员从接收到前方紧急情况的信息到开始出现反应动作将右脚移动到制动踏板上所经历的时间,一般为0.3~1.0 s.
2)制动系协调时间tx指从驾驶员踩下制动踏板开始施加制动力到汽车制动减速度达到最大值时所经历的时间,由制动系传递迟滞时间ta和制动力增长时间tb组成,其分布如表1所示.

表1 汽车制动协调时间的分布 s
3)持续制动时间tc指驾驶员使汽车保持最大制动减速度进行制动,直至车辆完全停止所经历的时间.当车轮抱死拖滑时,tc时间的长短只取决于制动时的初始车速及路面附着系数φ 的高低.
如果忽略驱动部件的制动作用,则在驾驶员反应时间tr及车辆制动传递延迟时间ta这2 个阶段内,车辆的减速度为0,车辆将保持初速度v0(单位:km/h)不变作匀速运动,驶过的距离s1(单位:m)为

在制动力持续增加时间tb内,车辆的制动减速度呈线性增长,最终达到其恒定的最大值amax,则在该时段内车辆驶过的距离s2为

在持续制动时间tc内,车辆的制动减速度保持恒定值amax不变,经过tc时间后车辆的速度降为0,从而驶过的距离s3为

因此,总的制动距离为

由于时间tb很短,忽略式(4)中的二次方项,同时考虑当制动到所有车轮抱死时amax=-gφ(g=9.8 m/s2),因此有

2 跟驰车辆安全距离
如图1所示,考虑在高速公路上行驶车辆的一般情况,当本车驾驶员观察到前方车辆制动信号灯亮以后开始执行本车的制动操作.以该时刻为0 时刻,则从确保不与前车发生追尾碰撞的角度考虑,只需本车在与前车保持一定距离L0(一般取3~10 m)时,本车车速降到与前车相同的车速vt即可.由式(5)可知,在该段时间内本车的行驶距离为


图1 跟驰车辆安全距离示意图
由车辆制动信号灯的工作原理可知,前方车辆在其制动信号灯亮的时刻,其制动减速度已基本上达到最大减速度.假设此时前车的初始速度为v′0,则在与本车相同的制动时间段内,前车驶过的距离为

因此,为防止发生追尾,本车与前方车辆的安全距离应为

考虑极端的情况,前车发生突发性交通事故,此时前车速度在极短时间内降为0,即vt=0,s′ =0.假设本车的初始速度v0=100 km/h,取L0=10 m,tr=1 s,ta=0.5 s,tb=0.9 s,干燥的沥青路面附着系数φ = 0.8,则由式(8)知,安全距离L 为

该计算结果与我国道路交通安全法关于安全车距的规定是相符的.当雨雪天气时,该安全距离还应适当增加.
3 基于单目视觉的前方车辆车距测量
在基于视觉的空间距离测量研究中,常见的视觉系统多采用双目立体视觉来实现.如文献[9]根据目标车辆在左右摄像头所获取的图像中对应的不同坐标,利用公垂线中点法计算出目标车辆到摄像头的距离.但立体视觉系统需对2 个摄像机拍摄的图像进行重建,以恢复物体三维的位置信息,算法非常复杂.针对车距测量的实际应用,在假设路面平坦的前提下,可通过单目视觉来完成车距测量.
文献[10]利用摄像机内部参数和透视投影的几何关系给出了计算前方车辆距离的方法,但在车距测量时需要提供摄像机的安装高度及俯仰角.摄像机安装高度的测量比较容易实现,但俯仰角的测量则很难实现.且在车辆行驶过程中摄像机俯仰角会发生瞬时的变化,如果得不到及时修正,会给车距测量结果带来很大误差.为此,作者在文献[10]方法的基础上,利用摄像机内部参数的标定结果及针孔模型的成像几何关系,结合车道线消失点及近视场特征点的位置推导出车距测量公式,避免了对摄像机俯仰角的测量.
图2为车距测量示意图,其中Oc为摄像机光心,OcI 垂直于路面于点I.摄像机光轴OcG 与路面相交于点G,与图像平面相较于点G′.Q 点为摄像机视场中拍摄到的路面上与摄像机纵向距离最近的点,本文将其定义为近视场点,它对应着图像下边沿上的像素点Q′.点P 为前方运动车辆车底阴影上一点,其在图像平面内对应的像素点为点P′,P 到摄像机的纵向距离d2即为前方车辆与本车之间的车距.若路面上近视场点Q 到摄像机的纵向距离为d1,则由针孔模型下的摄像机成像关系可知


图2 基于车道线消失点的车距测量示意图

式中,αy=f/dy 为图像像素坐标系纵轴的尺度因子;n0,n1,n2分别为图像中主点G′、近视场点Q′和车底阴影上点P′在像素坐标系下的纵坐标,各点坐标均可从图像中测得.同时,由于图像中车道线消失点H′对应的是世界坐标系中的无穷远点,因此光心与消失点的连线OcH′平行于路面,从而有

同时,根据图2有

将式(11)~(13)代入式(10)并化简,得

式(14)表明,只要测出近视场特征点Q 到车辆的实际距离d1,就可计算出前方车辆与本车之间的车距.
4 试验结果
4.1 静态车距测量试验
在道路现场进行了前方车辆静止情况下的车距测量试验,见图3.试验过程中按10 m 等间隔将被测车辆分别停放在摄像机前方10~120 m 处,拍摄前方车辆图像并检测图像中车底阴影的位置.

图3 不同车距时的前方车辆图像
通过摄像机内部参数标定得到αy=7 522,图像下边沿的纵坐标n1=3 311 像素,测得图像下边沿对应的路面上的近视场点到摄像机的实际距离为d1=6.84 m.图像中主点和消失点的纵坐标分别为n0=1 656 像素和n3=744 像素,表2中列出了不同车距时各图像中车底阴影所在直线的纵坐标n2.这样,由式(14)可得到各车距的视觉检测结果.将其与实际车距进行比较,结果显示,除了在前方车辆位于近端10 m 车距处,由于阳光斜射造成车底阴影超出车辆很多而引起较大误差外,其他位置采用上述单目视觉方法测量出的车距相对误差均小于3%,达到了较高的车距测量精度.

表2 基于单目视觉的静态车距测量结果
4.2 动态车距测量试验
由于受试验条件的限制,无法实时获取前方运动车辆到本车的实际距离来与视觉测量结果进行对比.为此,试验中将本车及前方车辆的行驶速度控制在某一固定值,即在行驶过程中保持两车之间的相对速度不变,记录下车辆行驶的时间即可间接计算出在各个时刻两车之间的实际车距.
实验中,前方车辆与本车之间保持10 km/h的相对速度行驶,摄像机以30 帧/s 的速度拍摄前方运动车辆图像(见图4).表3中列出了由式(14)计算得到的各帧图像对应的车距变化量,通过对基于单目视觉的车距变化量测量结果与实际计算得到的结果进行比较发现,视觉测量结果基本上能够反映车距变化的情况,达到了一定的测量精度.但从表中的数据也可看出,两者之间还是存在一定的误差,其原因主要是:
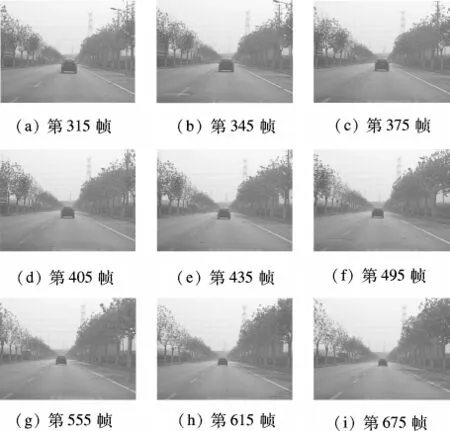
图4 以固定相对速度行驶的前方运动车辆图像序列
1)实际车距的变化量是通过控制两车相对车速计算得到的,车辆行驶过程中很难保证始终按固定的相对速度行驶,因此计算出的实际车距变化量本身就存在误差.
2)在通过单目视觉进行车距变化量测量时,本车在行驶过程中无法保证行驶方向始终与车道线方向保持一致,并且道路颠簸和瞬间的车辆振动都会给测量结果带来一定的影响.
3)在式(14)中,车距与近视场特征点到车辆的距离d1是成比例关系的,d1的测量误差会随着这种比例关系在车距测量结果中被成倍地放大.
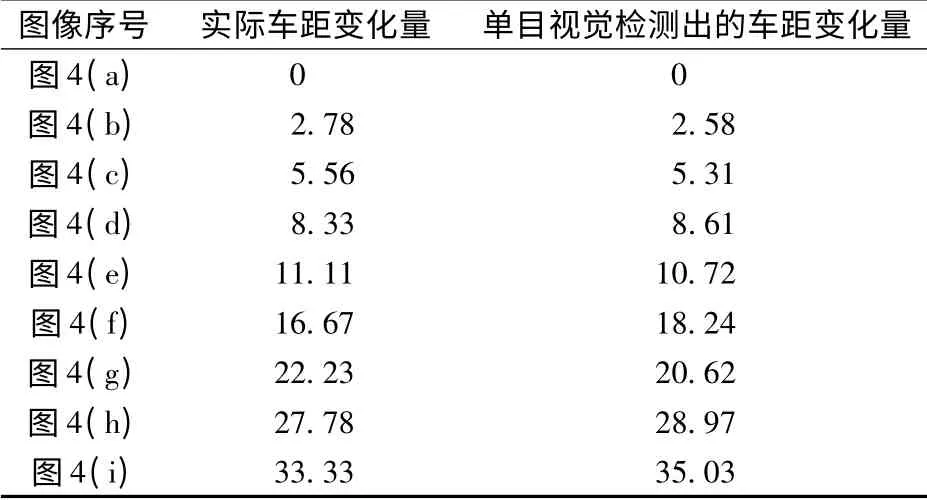
表3 基于单目视觉的车距变化量测量结果 m
因此,上述车距测量方法存在一定的测量误差,但就高速公路上运动车辆避撞的应用而言,该测量精度能够满足使用要求.
5 结语
本文首先通过对车辆制动模型进行分析,计算出跟驰车辆的安全车距.然后在研究国内外现有障碍物测距方法的基础上,确定采用单目视觉作为感知手段来进行跟驰车辆的车距测量.在假设路面平坦的前提下,从摄像机成像的基本原理出发,推导出车距与图像中近视场点到摄像机实际距离之间的函数关系,从而提出了基于车道线消失点的单目视觉车距测量方法.该方法既避免了对所有摄像机参数的标定,同时也解决了行车过程中车载摄像机外部参数变化影响车距测量结果的问题.道路现场试验结果表明,该方法能够较准确地测量出前方运动车辆与本车的距离,满足了结构化道路上跟驰车辆的车距测量要求.
References)
[1]Kasuga T,Yakubo S.Design of a dependable model vehicle for rear-end collision avoidance and its evaluation[C]//Instrumentation and Measurement Technology Conference.Austin,TX,USA,2010:641-646.
[2]Tsuchiya J,Hayashi M,Kohno R.Platoon characteristics of automatic vehicle speed control for vehicles equipped with DS-UWB radar[C]//IEEE 11th International Symposium on Spread Spectrum Techniques and Applications.Taichung, Taiwan, China, 2010:125-130.
[3]Parviainen J,López M A V,Pekkalin O,et al.Using Doppler radar and MEMS gyro to augment DGPS for land vehicle navigation[C]//18th IEEE International Conference on Control Applications.Saint Petersburg,Russia,2009:1690-1695.
[4]Chen Yandong,Meng Zhiqiang,Liu Jinglin,et al.High-precision infrared pulse laser ranging for active vehicle anti-collision application[C]//2011 International Conference on Electric Information and Control Engineering.Wuhan,China,2011:1404-1407.
[5]谢兴盛,方勇文,吴云峰,等.汽车自适应驰控装置中的红外激光测距[J].激光技术,2004,28(5):521-523.
Xie Xingsheng,Fang Yongwen,Wu Yunfeng,et al.Infrared laser ranging in auto adaptive cruise control system[J].Laser Technology,2004,28(5):521-523.(in Chinese)
[6]Kuo Yingche,Pai Nengsheng,Li Yenfeng.Visionbased vehicle detection for a driver assistance system[J].Computers and Mathematics with Applications,2011,61(8):2096-2100.
[7]刘燕,刘浩学.基于计算机视觉的单目摄影纵向车距测量系统研究[J].公路交通科技,2004,21(9):103-106.
Liu Yan,Liu Haoxue.Research on lengthways vehicle distance measurement system of monocular photograph based on computer vision[J].Journal of Highway and Transportation Research and Development,2004,21(9):103-106.(in Chinese)
[8]马骏.高速公路行车安全距离的分析与研究[J].西安公路交通大学学报,1998,18(4):90-94.
Ma Jun.A study on safe distance between the vehicles in freeway[J].Journal of Xi′an Highway University,1998,18(4):90-94.(in Chinese)
[9]张凤静,周建江,夏伟杰.基于双目立体视觉的汽车安全车距测量方法[J].智能系统学报,2011,6(1):79-84.
Zhang Fengjing,Zhou Jianjiang,Xia Weijie.Research of vehicle security spacing measurements based on binocular stereovision[J].CAAI Transactions on Intelligent Systems,2011,6(1):79-84.(in Chinese)
[10]王荣本,李斌,储江伟,等.公路上基于车载单目机器视觉的前方车距测量方法的研究[J].公路交通科技,2001,18(6):94-98.
Wang Rongben,Li Bin,Chu Jiangwei,et al.Study on the method of measuring the leading vehicle distance based on the on-board monocular camera[J].Journal of Highway and Transportation Research and Development,2001,18(6):94-98.(in Chinese)