高速公路驾驶员昼夜感知速度变化规律
2012-06-28程国柱胡立伟
程国柱 胡立伟 韩 娟
(1哈尔滨工业大学交通科学与工程学院,哈尔滨150090)
(2昆明理工大学交通工程学院,昆明650093)
国内外大量研究表明,速度与道路交通事故密切相关,车速限制作为降低道路交通事故发生率与严重程度的一项有效措施被广泛采用,而驾驶员的感知车速在制定合理的车速限制标准时不可或缺.Campbell等[1]认为速度感知是指某一驾驶员对其自身行驶快慢的判断,如果驾驶员低估其行驶速度,则行驶速度高于期望速度;如果驾驶员高估其行驶速度,则行驶速度低于期望速度.目前,国内还没有对感知速度的确切定义.金会庆等[2]给出了速度估计的定义;郑安文等[3]在 McLean[4]的基础上,进一步阐述了期望车速的定义.
诸多学者对驾驶员感知速度偏差及其产生的原因进行了分析.Haglund等[5]调查发现,有47%~58%的驾驶员感知速度低于实际记录的平均速度.Pasetto等[6]调查发现,驾驶员在夜间感知速度不稳定,且有45%的驾驶员在夜间弯道行驶时会有延迟反应.Snowden等[7]发现,雾天会导致驾驶员车速估计发生偏差.Suh等[8]发现,夜间有限的照明条件会使驾驶员产生车辆行驶速度过低的错觉,导致驾驶员高速行驶甚至超速.Campbell等[1]总结了影响驾驶员感知速度的因素,包括道路线形、光照条件等.国内对驾驶员感知速度的研究多集中在分析其影响因素,如艾力·斯木吐拉等[9]研究指出,疲劳驾驶使驾驶员速度估计时间明显增加.
综上所述,目前驾驶员感知速度的研究都没有定量给出感知速度随其影响因素的变化规律,建立相应的量化分析模型.本文拟开展高速公路驾驶员昼夜感知速度与道路线形、行驶车速的量化关系研究,以期为制定合理的高速公路昼夜车速限制标准提供理论支撑与决策依据.
1 驾驶员昼夜感知速度试验
1.1 试验方案
1.1.1 试验样本
选取身体健康的中等驾驶经验驾驶员10名,驾龄均在3~10年.
1.1.2 试验时间和地点
白天选取的时间段为上午9:00—11:30,夜间选取车辆相对较少的时间段21:00—23:00.选择长春至松原高速公路22 km新建路段(以下简称“长松高速”)为试验地点,设计速度为100 km/h,无照明设施.考虑我国高速公路很少设置照明设施,故本研究仅针对无照明设施的高速公路.此外,高速公路交通标志标线设计均需遵照国家标准与规范,不存在差异,故交通标志标线对驾驶员速度感知的影响本文也不予以考虑.为了研究不同线形条件下的高速公路驾驶员昼夜感知速度,根据《公路工程技术标准》[10]对平曲线半径和纵坡的规定,长松高速公路试验路段分类标准如表1所示.

表1 长松高速公路试验路段分类标准
1.1.3 试验步骤
试验车辆选取小型轿车,具体试验步骤如下:
①根据长松高速平、纵断面设计文件及交通标志设置一览表,按照表1的分类标准确定多组试验路段并编号,以试验路段内的交通标志作为路标识别各试验路段,并获取其平纵线形指标.
②驾驶员在到达各试验路段起点前加速行驶到速度v(驾驶员事先不知道具体速度值),行驶平稳后,驾驶员报出其速度估计值vf.
③记录员记录整理驾驶员的感知速度数据.
④在白天和夜间分别对各试验路段以70 km/h为起始车速,10 km/h为步长加速至120 km/h,重复步骤②~③.
1.2 试验结果分析
对采集的驾驶员昼夜不同速度、不同线形条件下的感知速度取平均值,如表2和表3所示.
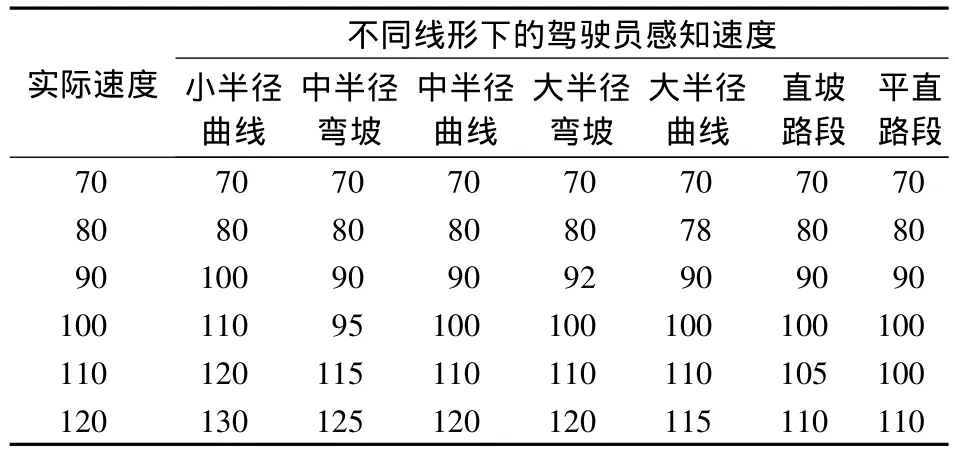
表2 白天不同速度不同线形下的驾驶员感知速度 km/h
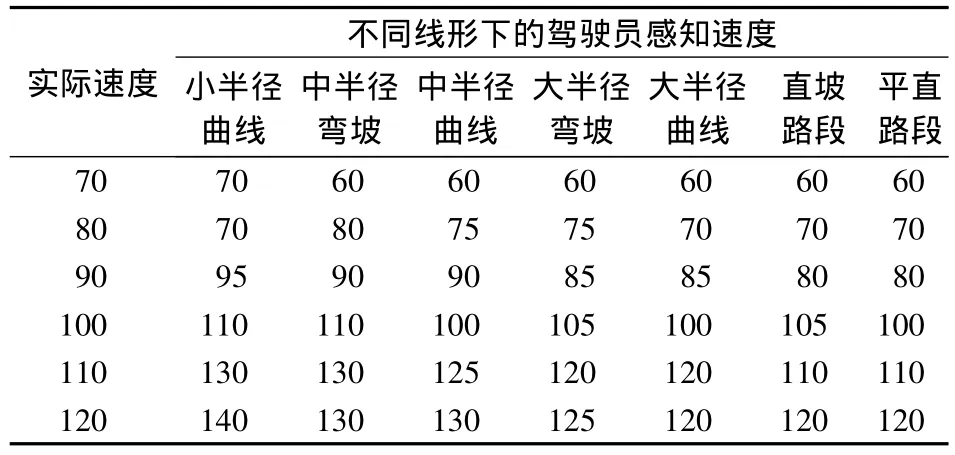
表3 夜间不同速度不同线形下的驾驶员感知速度 km/h
由表2和表3可知,白天驾驶员的感知速度准确程度在 100~110 km/h发生了转变,低于100 km/h时驾驶员的感知速度基本准确,高于110 km/h时感知速度发生偏差;而夜间90 km/h以下驾驶员感知速度比实际速度偏低,高于100 km/h时感知速度偏高.
驾驶员昼夜感知速度的准确率如图1所示.由图1可知:驾驶员白天感知速度准确率为66.0%,明显高于夜间的29%;驾驶员夜间感知速度偏低的比例为38%,明显高于白天的17%,感知速度偏高的比例为33%,仍高于白天的17%.
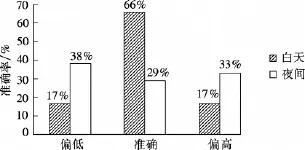
图1 驾驶员昼夜感知速度准确率
2 驾驶员感知速度变化规律
2.1 感知速度与实际行驶速度的关系
驾驶员昼夜感知速度与实际速度的回归关系模型如表4所示.我国高速公路的最低限速为60 km/h,最高限速为120 km/h,本次试验数据的范围为70~120 km/h,模型中实际行驶速度v的取值范围也是该范围.由表4可知,白天驾驶员感知速度与实际速度相关性较强.平直、直坡、大半径曲线、小半径曲线的感知速度与实际行驶速度呈对数关系,大半径弯坡、中半径曲线呈现线性关系,中半径弯坡呈现指数关系.而在夜间,平直、直坡、大半径曲线、大半径弯坡、中半径曲线感知速度与实际行驶速度呈现指数关系,中半径弯坡呈对数关系,小半径曲线呈现线性关系.

表4 驾驶员感知速度与实际行驶速度回归关系
2.2 感知速度与平曲线半径的关系
在一定速度条件下,驾驶员感知速度与平曲线半径的回归关系模型见表5.可看出:白天实际行驶速度为70 km/h时,感知速度与平曲线无相关关系;实际行驶速度为80~100 km/h时,感知速度与平曲线半径呈现微弱的相关关系;实际行驶速度为110~120 km/h时,感知速度与平曲线半径呈现对数关系.夜间实际行驶速度为70~90 km/h时,感知速度与平曲线半径相关关系很微弱;实际行驶速度为100~120 km/h时,相关关系较强.

表5 驾驶员感知速度与平曲线半径回归关系
驾驶员低速行驶时,其感知速度主要受实际行驶速度的影响.随着速度的增大,平曲线半径对驾驶员昼夜感知速度的影响程度逐渐加强,成为驾驶员速度感知的重要影响因素.
2.3 感知速度与纵坡值的关系
根据回归分析结果可知,驾驶员昼夜感知速度与纵坡值相关性均较小,纵坡值对感知速度的影响没有呈现出一定的规律性.
3 驾驶员感知速度模型
应用SPSS统计分析软件,采用多元非线性回归方法对实测数据进行分析,建立相应的驾驶员昼夜感知速度模型.
3.1 白天感知速度模型
上述分析表明,纵坡值与感知速度的关系无规律可循.因此,在建立感知速度模型之前,有必要对感知速度进行自变量筛选.筛选结果表明,剔除变量纵坡值后,模型相关系数从原来的0.970升高到0.971,说明剔除变量纵坡值是合理的,也进一步验证了感知速度单因素分析时,感知速度与纵坡值没有相关关系的结论.对108个试验数据进行回归分析,得到的函数形式及相关系数见表6.
以相关系数最大为选择标准,驾驶员白天感知速度模型最优的函数形式如下:

表6 驾驶员白天感知速度模型

3.2 夜间感知速度模型
选取向后筛选的策略,剔除变量纵坡值后,模型相关系数保持为0.959,说明剔除的纵坡值是无关变量.利用多元回归,得到驾驶员夜间感知速度模型不同的函数形式及相应的相关系数,见表7.
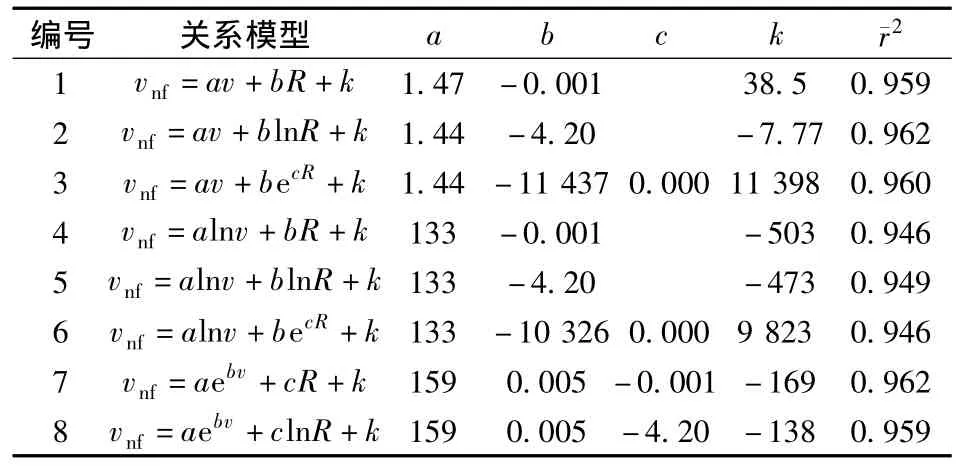
表7 驾驶员夜间感知速度模型
以相关系数最大为选择标准,模型2与模型7的相关系数最大,均为0.962,从函数形式上看,应用模型2更为简便,故本文推荐驾驶员夜间感知速度模型最优的函数形式如下:

从模型系数来看,驾驶员昼夜感知速度模型的速度系数均为正,说明驾驶员的感知速度随速度增大而增大;驾驶员昼夜感知速度模型的平曲线半径系数均为负,说明随着平曲线半径的增大,感知速度会降低.
驾驶员昼夜感知速度模型的相关系数白天为0.972,夜间为0.962,说明白天和夜间多元回归的拟合效果都较为理想.
4 结论
1)驾驶员白天感知速度准确率达到67%,高于夜间的29%.驾驶员白天感知速度的准确率随实际行驶速度的增大而降低.实际行驶速度较低时,驾驶员夜间感知速度低于实际行驶速度;而实际行驶速度较高时,驾驶员夜间感知速度则高于实际行驶速度.
2)驾驶员昼夜感知速度随实际行驶速度、平曲线半径、纵坡值而变化的规律表明,驾驶员昼夜感知速度与纵坡值均无关,与实际行驶速度、平曲线半径则呈较强的相关性.
3)建立了驾驶员昼夜感知速度与实际行驶速度、平曲线半径的二元非线性模型,模型表明驾驶员昼夜感知速度均随着速度的增大而增大,随平曲线半径的增大而降低.
References)
[1]Campbell J L,Richard C M,Brown J L,et al.Human factors guidelines for road systems,chapter 17:speed perception,speed choice,and speed control,NCHRP Report 600C[R].Washington DC:Transportation Research Board,2010:4-5.
[2]金会庆,陈嵘,张树林.机动车驾驶员的速度估计、复杂反应判断和操纵机能特征研究[J].人类工效学,1995,1(1):13-18.Jin Huiqing,Chen Rong,Zhang Shulin.Study on occupational driver's characteristics of speed anticipation,discriminative reaction and action judgment[J].Ergonomics,1995,1(1):13-18.(in Chinese)
[3]郑安文,牛倬民.高等级公路运行速度与设计车速匹配研究[J].武汉科技大学学报,2003,26(3):273-275.Zheng Anwen,Niu Zhuomin.Research on coordination between motorway operation speed and design speed[J].Journal of Wuhan University of Science and Technology,2003,26(3):273-275.(in Chinese)
[4]McLean J R.Driver speed behaviour and rural road alignment design[J].Traffic Engineering and Control,1981,21(4):208-211.
[5]Haglund M,Aberg L.Speed choice in relation to speed limit and influences from other drivers[J].Transportation Research Part F:Traffic Psychology and Behaviour,2000,3(1):39-51.
[6]Pasetto M,Manganaro A.Nighttime speed negotiation on rural road S-shaped curves:discussion of an experimental case-study[C]//Proceedings of the Fifth International Driving Symposium on Human Factors in Driver Assessment,Training and Vehicle Design.lowa City,USA,2009:475-481.
[7]Snowden R J,Stimpson N,Ruddle R A.Speed perception fogs up as visibility drops[J].Nature,1998,392(6675):450.
[8]Suh W,Park P Y-J,Park C H,et al.Relationship between speed,lateral placement,and drivers'eye movement at two-lane rural highways[J].Journal of Transportation Engineering,2006,132(8):649-653.
[9]艾力·斯木吐拉,马晓松.基于驾驶适宜性检测的沙漠公路驾驶员速度估计分析[J].心理科学,2009,32(5):1218-1220.Ismutulla Eli,Ma Xiaosong.An analysis of drivers'study on speed anticipation on desert highways[J].Psychological Science,2009,32(5):1218-1220.(in Chinese)
[10]中华人民共和国交通部.JTG B01—2003公路工程技术标准[S].北京:人民交通出版社,2004.
