基于观测器的线性不确定时滞系统的鲁棒控制*
2012-03-06段振辉
河南工学院学报 2012年4期
段振辉
(河南机电高等专科学校基础部,河南新乡 453000)
1 引言
不确定时滞系统在工程中广泛存在,因而受到人们更多关注。有关不确定时滞系统鲁棒稳定性及鲁棒镇定的工作,也取得了令人瞩目的成果[1-3]。
基于系统的状态观测器来设计鲁棒控制器,是解决这一问题的有效方法,本文设计了一个观测器的方法并给出相应的条件。
2 系统描述
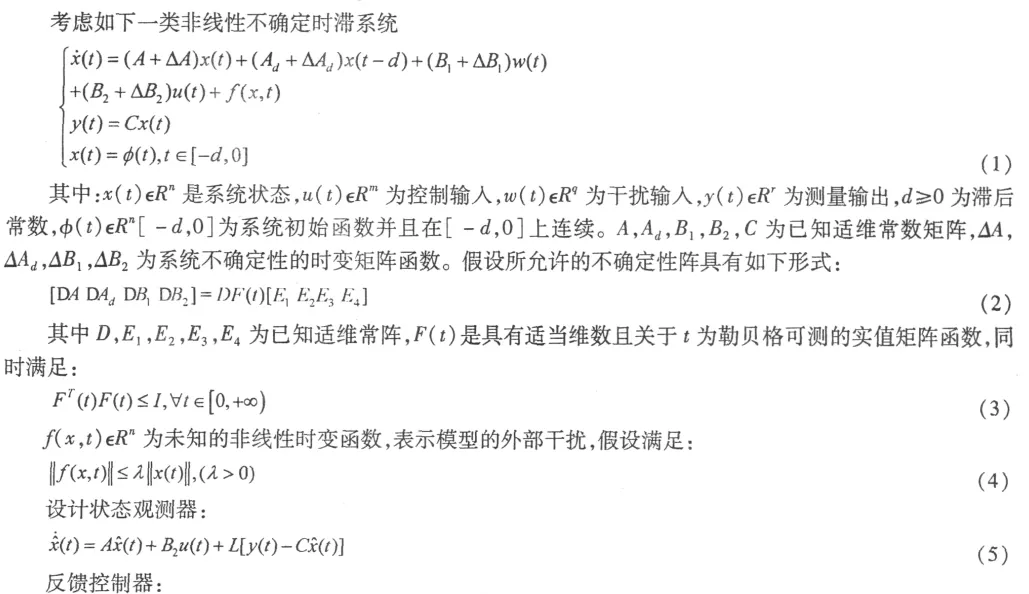

由于∑是非线性矩阵,在矩阵两边分别乘以 diag{P-1,Q-1,I,I,I},并记 Y=P-1,Z=Q-1,R1=YKT,R2=ZKT,矩阵不等式∑<0,利用Schur补引理[5],等价于矩阵不等式(12)只要有解式即得证明。
(责任编辑吕春红)
[1]栾小丽,刘飞.非线性不确定性时滞系统观测器型鲁棒无源控制[J].系统工程与电子技术,2008,30(9):1755 -1758.
[2]段玉波,邵克勇,张江.基于观测器的线性不确定时滞系统的保代价控制[J].控制与决策,2003,10(1):81 -84.
[3]郑连伟,刘晓平,黄公胜.一类不确定线性时滞系统输出反馈鲁棒控制[J].控制与决策,2001,16(4):439-442.
[4]Z.Wang,K.J.Burnham.Robust filtering for a class of stochastic uncertain nonlinear time-delay systems via exponential state estimation,IEEE.Trans.Singal Processing,2001,49,794 -804.
[5]俞立.鲁棒控制[M].北京:清华大学出版社,2002.
