一类控制受限不确定系统的控制分配重构控制
2012-03-03刘春生朱心中
刘春生,朱心中
(南京航空航天大学自动化学院,江苏南京 210016)
引言
控制分配技术作为解决多操纵面战斗机控制系统设计的有效途径,能够合理组合多操纵面使飞机适应不同的飞行任务和条件。在操纵面损伤或作动器发生故障情况下,可以利用控制分配技术实现剩余正常操纵面的重新组合,协同控制飞机运动,提高飞机控制系统的鲁棒性,因此控制分配技术已日益引起国内外科研工作者的广泛关注[1-4]。
在控制系统中,控制律的设计一般是基于系统的标准模型,但是实际系统往往存在不确定性,此时仍然采用对正常系统设计的系统控制律,将不能有效控制被控对象,不能达到预期的控制目的。系统的不确定性是引起系统不稳定和降低系统性能的根源,尽管不确定性系统的研究已取得了不少成果,但是针对具有冗余特性的不确定性系统的研究目前大多都采用了鲁棒控制等方法,而没有充分考虑系统具有冗余的特性。因此,本文将首先根据控制分配的相关理论,得到一个虚拟被控系统;然后再根据自适应控制理论和李雅普诺夫理论设计一种控制受限系统的稳定自适应控制律,从而完成系统的重构任务。
1 问题描述
本文将考虑如下状态方程形式的不确定性系统:

维数的状态矩阵、控制矩阵和输出矩阵,且控制矩阵Bu满足:rank(Bu)=n<m;系统状态变量 x(t)可测。
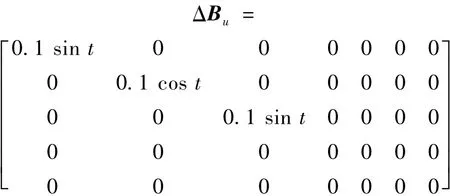
系统的不确定性ΔBu满足:

式中,GT(t)G(t)≤I;H1,E1为适当维数的矩阵。
系统不确定性的存在使得按照正常系统设计的控制器不能有效地控制被控对象,甚至有可能使得系统性能严重偏离实际要求。
2 上层控制器的设计
令F=Bu+ΔBu,并假设F总可以分解为:F=BvB,其中F和B未知,Bv已知,则上述系统模型变为如下形式:
易证系统控制律能够使得等效系统式(4)大范围渐近稳定且能跟踪系统输出。
3 自适应控制分配算法设计
由于虚拟控制信号v(t)与控制信号uc存在v=Buc的关系,如果 B的伪逆总存在,则存在如下关系:

式中,定义T为自适应控制分配阵。系统结构图如图1所示。

图1 系统结构图
主要思想如下:当一个或多个作动器偏转达到对应作动器可以偏转的最大位置,这时作动器的期望指令uc与实际的作动器输出u往往不相等,可以利用它们之间产生的误差,实时调节自适应控制分配阵T,使得作动器实际偏转都在作动器偏转范围内,从而保证系统的输出能够跟踪参考输入。
定理1:对于一类具有参数不确定且控制受约束的不确定系统(系统结构见图1),设计自适应控制分配阵T的自适应控制律为:

则当控制分配阵T的自适应控制律满足式(9)时,不确定系统的输出能够渐近跟踪标准参考输入信号。
T与T0的定义以及定理1的证明参见文献[5]。
4 仿真结果及分析
(1)多操纵面战斗机ADMRIE简介
ADMIRE是具有非线性和6自由度的单座单发鸭式布局飞机仿真模型。ADMIRE操纵面主要包括:左右鸭翼(δlc,δrc)、左右外升降副翼(δloe,δroe)、左右内升降副翼(δlie,δrie)、方向舵(δr)和前缘襟翼等。ADMIRE多操纵面战斗机在h=3 000 m,Ma=0.22的平飞条件下的线性状态空间模型见文献[6]。
假设系统的不确定性为:
(2)控制任务:对于上述的不确定性系统,考虑作动器偏转受限,设计基于控制分配和自适应控制的控制器,使得系统输出既能跟踪参考指令,又能使得偏转在最大和最小偏转范围内。
图2为各操纵面偏转响应。在考虑作动器偏转位置受限的情况下,对于同一跟踪指令,由于作动器偏转受限,作用于作动器的指令和实际的输出往往是不相等的,有时作动器会发生饱和,使得系统的输出不能跟踪参考指令。本节通过利用作动器实际输出和作动器指令的偏差设计重构控制律,使得作用于作动器的指令不会使得执行器发生饱和。从仿真结果曲线看,参考指令使得右外升降副翼和方向舵发生饱和,而对系统重构后,通过调节左鸭翼和右鸭翼,使得右外升降副翼和方向舵不发生饱和,从而达到了控制目的。
图3为系统的输出响应曲线。通过图2可以看出,在未重构时,系统输出跟踪标准参考信号时,有的操纵面发生了偏转饱和。由图3可以同时看出,此时系统的输出曲线不能完全跟踪标准参考输入信号,系统不能很好地完成控制任务;而系统重构后,各操纵面得到了重新分配且都在合理的偏转范围内,从而保证了系统的输出能够渐近跟踪参考输入信号。
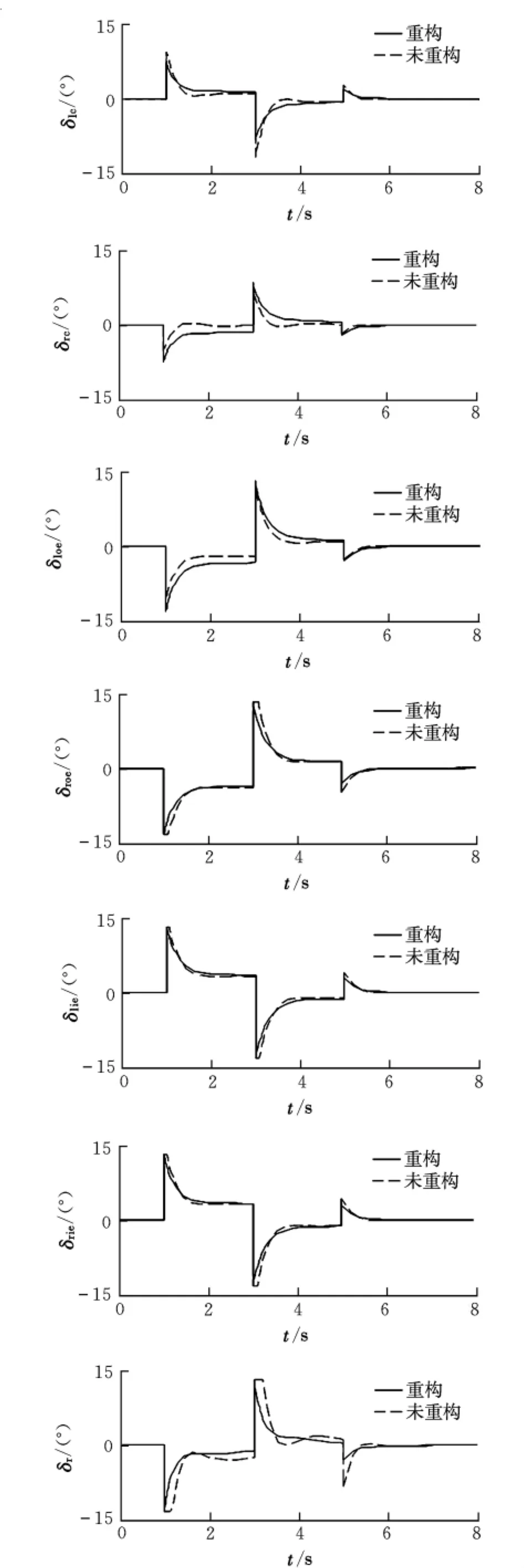
图2 操纵面偏转响应
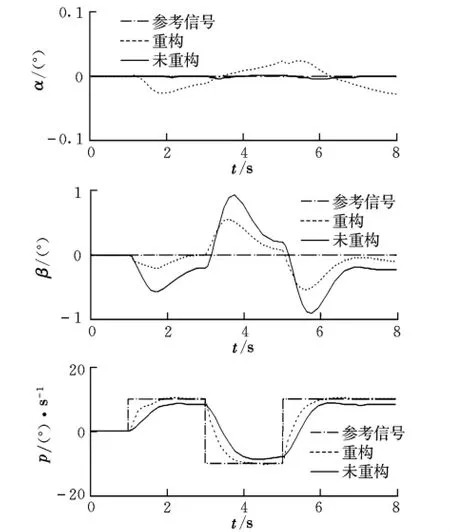
图3 系统输出响应曲线
5 结束语
本文针对一类控制受限的不确定性系统进行了研究,提出了基于控制分配理论的重构控制策略。充分考虑了作动器偏转受约束的情形,基于伪逆控制分配算法,利用自适应控制理论和李雅普诺夫稳定理论,设计了控制分配阵的自适应控制律,使得系统在作动器发生饱和的情形下自适应地调节控制分配阵,较好地完成了系统重构任务。仿真结果验证了所提出的重构策略的合理性。
[1] 杨恩泉,高金源,李卫琪.多目标非线性控制分配方法研究[J].航空学报,2008,29(4):995-1001.
[2] 马建军,李文强,李鹏,等.飞行器控制分配技术研究现状与展望[J].飞行力学,2009,27(3):1-5.
[3] 陈怀民,徐奎,马松辉,等.控制分配技术在无尾飞机纵向控制系统中的应用研究[J].西北工业大学学报,2007,25(2):192-203.
[4] Zhang Youmin,Suresh V S,Jiang Bin,et al.Reconfigurable control allocation against aircraft control effectors failures[C]//Proceedings of the 16th IEEE International Conference on Control Application.Singapore,2007:1197-1202.
[5] 朱心中.基于控制分配的多操纵面飞行器重构控制研究[D].南京:南京航空航天大学,2010.
[6] Harkegard O,Glad S T.Resolving actuator redundancy—optimal control vs control allocation[J].Automatia,2005,41(1):137-144.
