飞行仿真中基于人类思维模式的飞机轨迹算法
2012-03-01高大鹏
高大鹏
(中国民用航空飞行学院计算机学院 四川 广汉 618307)
0 介绍
轨迹算法,实际上是求出在任一时刻飞机的位置,求出各个时刻的位置,就可以知道飞机的轨迹了。
在二维雷达仿真的软件中,有两种飞机轨迹算法比较常用。这两种算法实现简单,但都与实际的轨迹有较大的偏差。为了使轨迹更加接近真实和智能化,设计了一种按照人类思维模式进行建模的飞行算法。
1 常用算法介绍
1.1 飞机完全按照预设航线飞行的算法
在算法中,飞机在雷达上的轨迹与预设的航线重合,算法实现过程如下。
设飞机飞行时间为t,速度为v,则飞行距离s=tv。预设航线由一些关键点(x1,x2,… ,xn)依次用线段连接而构成。关键点存储为一个线性表l。设每个关键点的经纬度为(loi,lai),可以得到一个递归距离序列di:

其中,dis是求两个关键点距离的函数,di为x1到xi点的距离。
当di≤s≤di-1时,表明飞机在xi,xi-1之间,令d=dis(xi,xi-1), d0=s-di-1,xi,xi-1的经纬度为(loi,lai),(loi-1,lai-1)。则易得飞机的经纬度(lo,la):

通过算法的实现,飞机严格在预设航线上移动,可以精确计算出飞机到达某一点的时间。但是飞机在转弯时违背了物理特性,没有转弯过程,转弯半径为零。
每隔3 min采集一次降雨强度、风速、覆冰重量,按时间先后顺序,分别记为P=(p(1), p(2), p(3), ……, p(10)); W=(w(1), w(2), w(3), ……,
1.2 以关键点为目标的算法
该算法描述如下:
如图1所示,p点为飞机当前位置,xi为下一个目标点,飞机飞行方向与x轴的夹角为b。p与xi的连线与x轴的夹角为a。已知当前飞机位置(lo,la)、方向heading和速度v,根据目标的位置(lo1,la1),求得下一次显示的位置、方向和速度。
首先,a和b的范围都规整为0~2π。由于民航飞机每秒转向为2°,而雷达仿真屏幕每2秒刷新一次,故可设每次转向4°。方法为:转向时,查看a-b的值,如果小于4°,则令b= a。否则,如果xi点在p点左边,则左转,令b=b+4°,反之则右转,令b=b-4°。
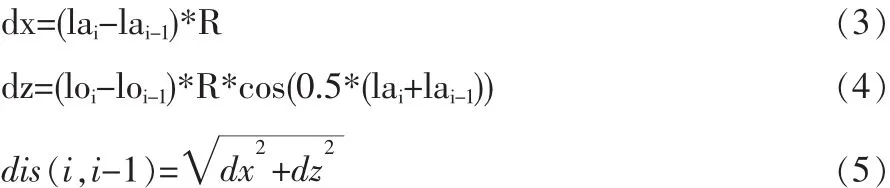
得到了新的航向b后,求取下一次显示的经纬度,易得公式如下:

其中,R是地球半径。通过以上计算,可以得到飞机在任意时刻的方向和位置。算法符合物理特性,实现比较简单,但是容易发现,飞机在飞行过程中,离预设航线都有一定的距离。
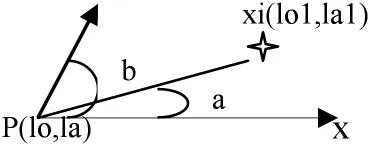
图1 位置示意图
3 基于人类思维模式的轨迹算法
以上算法,都具有缺点,算法一不符合物理特性,算法二在飞行时飞机偏离航线。新算法的设计不但针对这些不足,而且是按照人类的思维模式来进行的假设。
3.1 假设
(1)为了节省燃油和时间,飞行员总是尽量选择最近的路线;
(2)为了飞行安全,飞行员总是尽量靠近预设航线;
(3)当目标点不可达时,飞行员会在遵照上两条假设的前提下,忽略目标点,前往下一个目标点;
(4)飞行员都能很好地驾驶飞机,不会出现误操作现象。
3.2 算法描述
如图2所示,飞机的轨迹一直都在预设轨道上,只有在转弯时,才偏离轨道。而且转弯半径是通过飞机的性能和速度计算出来,符合实际的飞行轨迹。
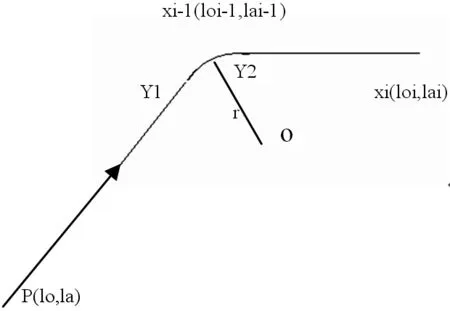
图2 飞机轨迹图
容易证明,按照这条路线,是最近的。故按照图2的轨迹飞行,满足上述假设条件。
3.3 算法实现
本算法实现简单。其本质就是计算半径为r的圆与不同夹角的外切点。
如图2所示,如果线段k1(P,xi-1)与线段k2(xi-1,xi)相交于xi-1点,设两条线段相交的夹角为2a。圆心为o,半径为r的圆,同时与k1和k2相切。得到的飞行轨迹为三个部分的连接。这三个部分为:线段(P,Y1),圆弧(Y1,Y2),线段(Y2,xi)。故只需求出Y1和Y2的坐标即可。
根据平面几何知识,易得到Y1,Y2的坐标。

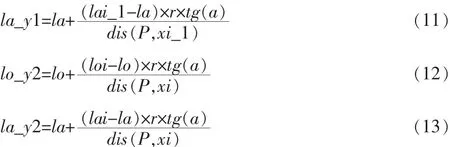
(10)到(13)式中,Y1的经纬度为(lo_y1,la_y1),Y2的经纬度为(lo_y2,la_y2)。式中其它变量与图2中对应。Dis函数由(5)式说明。
至此,算法得到了完整的飞行轨迹。下图3为程序截图。
图3 程序运行截图
4 结论与未来的工作
飞行仿真是一个严肃的工作,仿真的真实程度对飞行员和航空管制员的训练效果直接相关。飞行仿真越真实,训练效果就越好。
所以在实现仿真过程中,应尽量使实验效果贴近现实。
采用本文提出的方法,飞行轨迹与现实中的飞机飞行轨迹最为接近,可以达到更好的仿真效果。
[1]骆慈孟.空域、飞行程序与机场建设[J].空中交通管理,1995,2.
[2]蔡东闽.空域评估系统及其仿真研究[D].南京航空航天大学,2002.
[3]卢敏.基于GIS飞行程序的设计[D].北方工业大学,2006.
[4]中国民用航空总局第191号令.CCAR-140民用机场运行安全管理规定[S].2007.
