一个新三维系统的电路实现及其混沌控制
2012-02-23吴淑花刘振永张若洵容旭巍
吴淑花,刘振永,张若洵,容旭巍
(1.石家庄学院物理与电气信息工程系,河北石家庄 050035;2.邢台学院初等教育学院,河北邢台 054001)
0 引言
混沌是在确定性系统中表现出的一种不确定现象,并存在于自然界的诸多领域,如物理学、化学、生物学、地质学以及信息技术、社会科学等。自上世纪60年代第一个混沌系统——Lorenz系统被发现以来[1],人们相继发现了多个混沌吸引子[2-4]。2005年,Qi等提出了另外一种全新的混沌系统——Qi系统[5],该系统与以往发现的系统最大不同之处在于它的每个方程均含有非线性乘积项,动力学行为更为复杂。
随着人们对混沌的基本特性的深入研究,有目的地控制或者加强已存在的混沌行为越来越广泛地应用于机械振动、工程设计、电力电网动态分析和保护、信号检测与处理等领域,近年来,混沌现象应用于图像数据加密、保密通信、电子振荡发生器设计等方面的研究取得了迅猛发展。在这些应用中,通过电路设计来研究混沌信号和实现混沌控制已成为研究的热点[6-9]。
本文基于Qi系统提出了一个新的系统,该系统含4个参数,每个方程都含有一个非线性项。通过理论推导、数值仿真系统的Poincaré截面图、功率谱、时域图等,研究了该系统的基本动力学特性;设计了新系统的硬件电路并进行了仿真实验,进一步验证了新系统的混沌行为。基于LaSalle不变原理,设计了一个简单的自适应反馈控制器,将新混沌系统控制到不稳平衡点,数值仿真证实了该方法的有效性和可行性。
1 新的混沌系统
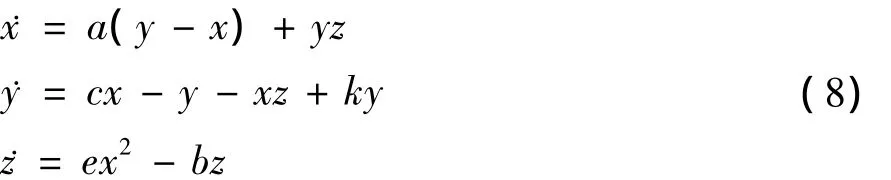
本文提出的新混沌系统的数学模型为

(1)式中:a,b,c,e是实常数。当 a=35,b=8/3,c=80,e=4.8,选取初值(1,-1,30)时,新系统存在一个典型的混沌吸引子,如图1所示。
1.1 基本特性分析
在变换(x,y,z)→(-x,-y,z)下系统(1)具有不变性,即系统(1)关于z轴具有对称性,系统中的参数均不影响这种对称性的成立。
新系统为耗散系统,由(1)式得

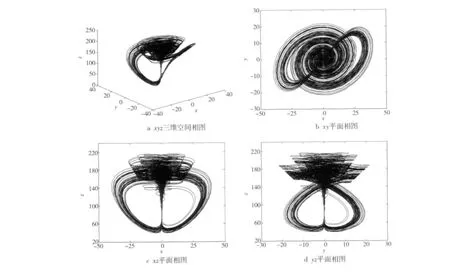
图1 系统(1)的混沌吸引子Fig.1 Chaotic attractor of sysytem(1)
1.2 平衡点及稳定性

在平衡点S0(0,0,0),对系统(1)进行线性化得到其Jacobian矩阵为

令 det(J0- λI)=0 ,得到平衡点S0(0,0,0)相应的3个特征根:λ1=37.578 8,λ2= -2.666 7,λ3= -73.578 8。其中 λ1为正实根,而 λ2和 λ3都是负实根,因此,平衡点S0为不稳鞍结点。
由于2个非零平衡点 S1,S2具有(x,y,z)→(-x,-y,z)的对称性,因此2个解具有相同的性质,故我们分析其中之一即可。在此只分析平衡点S1(-6.653 9,-2.030 5,79.694 8)的稳定性。
在平衡点S1对系统(1)进行线性化得到Jacobian矩阵为
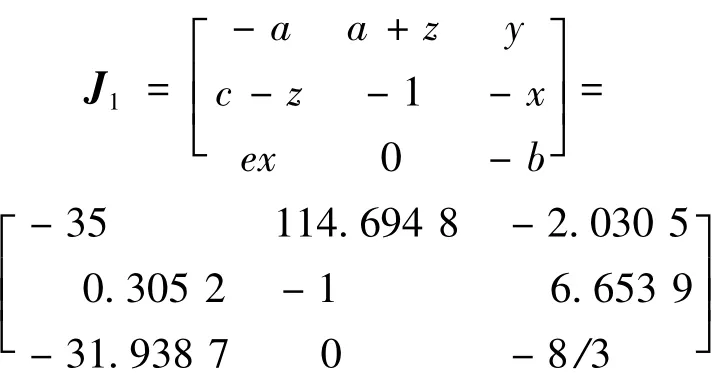
令det(J0-λI)=0得到S1的特征根为λ1=-55.221 2,λ2=8.277 3+28.494 7i和λ3=8.277 3-28.494 7i。因为λ1为负实根,而λ2和λ3是一对具有正实部的共轭复根,因而平衡点S1是不稳焦结点,显然S2也是不稳焦结点。
由上述分析可知,系统(1)的3个平衡点都是不稳定的,其中S0为不稳鞍结点;而另外2个平衡点S1和S2都是不稳焦结点。
1.3 Lyapunov指数和Lyapunov维数
利用奇异值法计算系统(1)在参数a=35,b=8/3,c=80,e=4.8时的 Lyapunov指数分别为:λL1=8.365 8,λL2=0.003 1和 λL3= -47.072 4。从而我们得到新系统的Lyapunov维数为

由于系统的最大Lyapunov指数大于零,而且系统的Lyapunov维数为分数,由此可以断定新系统是混沌的。
1.4 混沌吸引子
当参数a=35,b=8/3,c=80,e=4.8时,系统(1)存在1个典型的混沌吸引子。图1是利用matlab软件,采用了四阶Runge-Kutta离散化算法,运行300 s后取后面的200 s数据得到的混沌吸引子相图。
由图1可见,新系统的混沌吸引子轨线在特定的吸引域内具有遍历性。这个吸引子与Qi系统的吸引子形状不相同(Qi系统有5个平衡点,而新系统只有3个),与其他系统(如Lorenz系统、Chen系统、Lü和Liu系统)的吸引子形状也都不相同。
图2给出了系统(1)的动力学行为分析。由图2a可见,新系统的时域波形是非周期的,其解的流对初始值非常敏感。它的频谱是连续谱,如图2b所示,其峰值连成一片,频谱图中没有明显的波峰。说明新系统是混沌的,而且具有很宽的序列频谱。
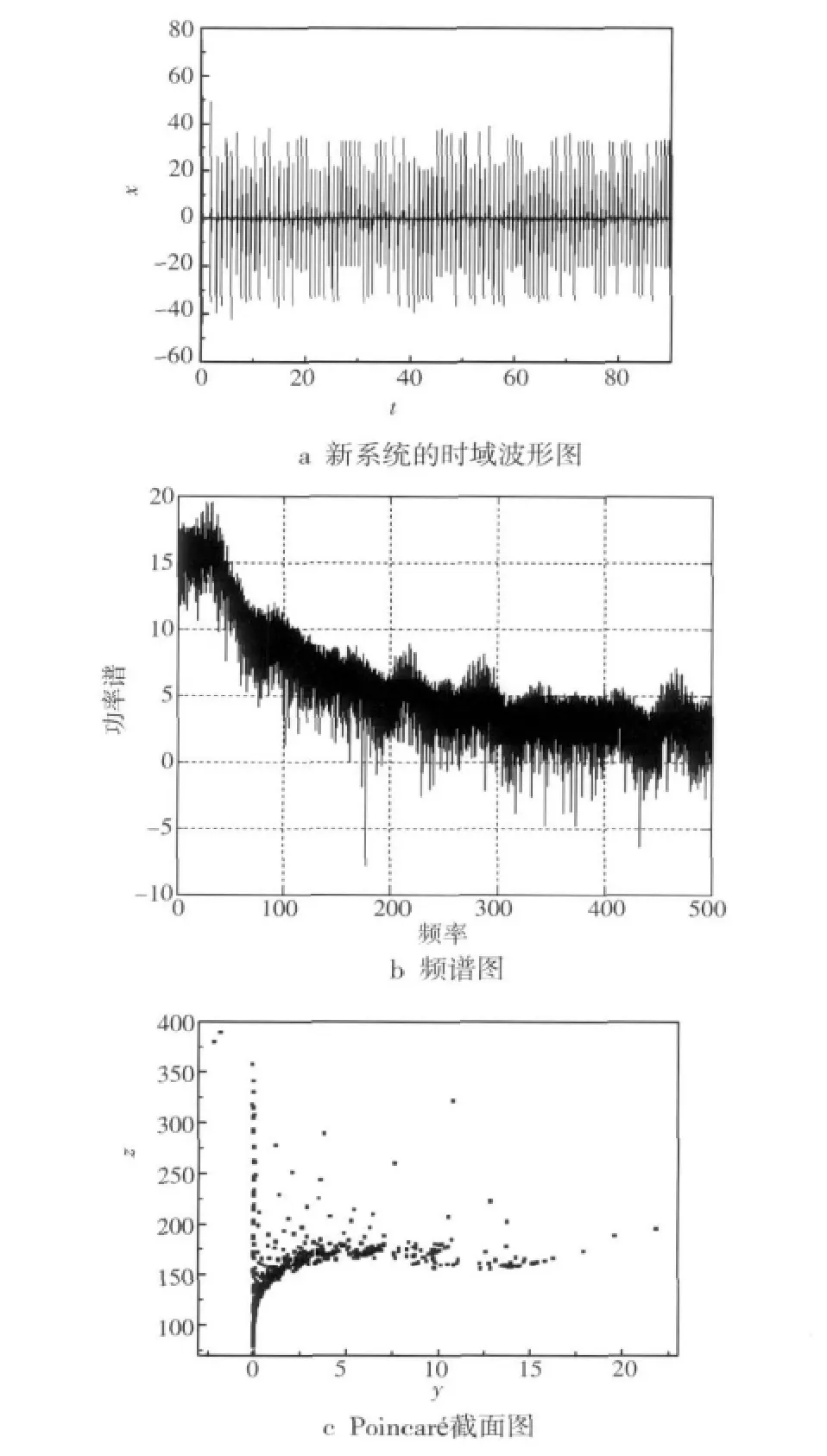
图2 系统(1)的动力学行为分析Fig.2 Dynamical analysis of sysytem(1)
选取x=0的截面,得到系统(1)的Poincaré截面图,如图2c所示。从图2c可以看出Poincaré截面图上是一些成片的密集的点,具有一定的分形结构。一些叶片被反复折叠,说明了系统的动力学行为的复杂性。
2 电路的设计和仿真
对本文所提出的新系统进行了振荡器电路设计。由运算放大器、模拟乘法器、电阻和电容器等实现加、减、乘法等运算,并将3个状态变量x,y和z连接成一个整体,混沌信号的输出电平调为原来的 1/10。电路设计如图3所示。
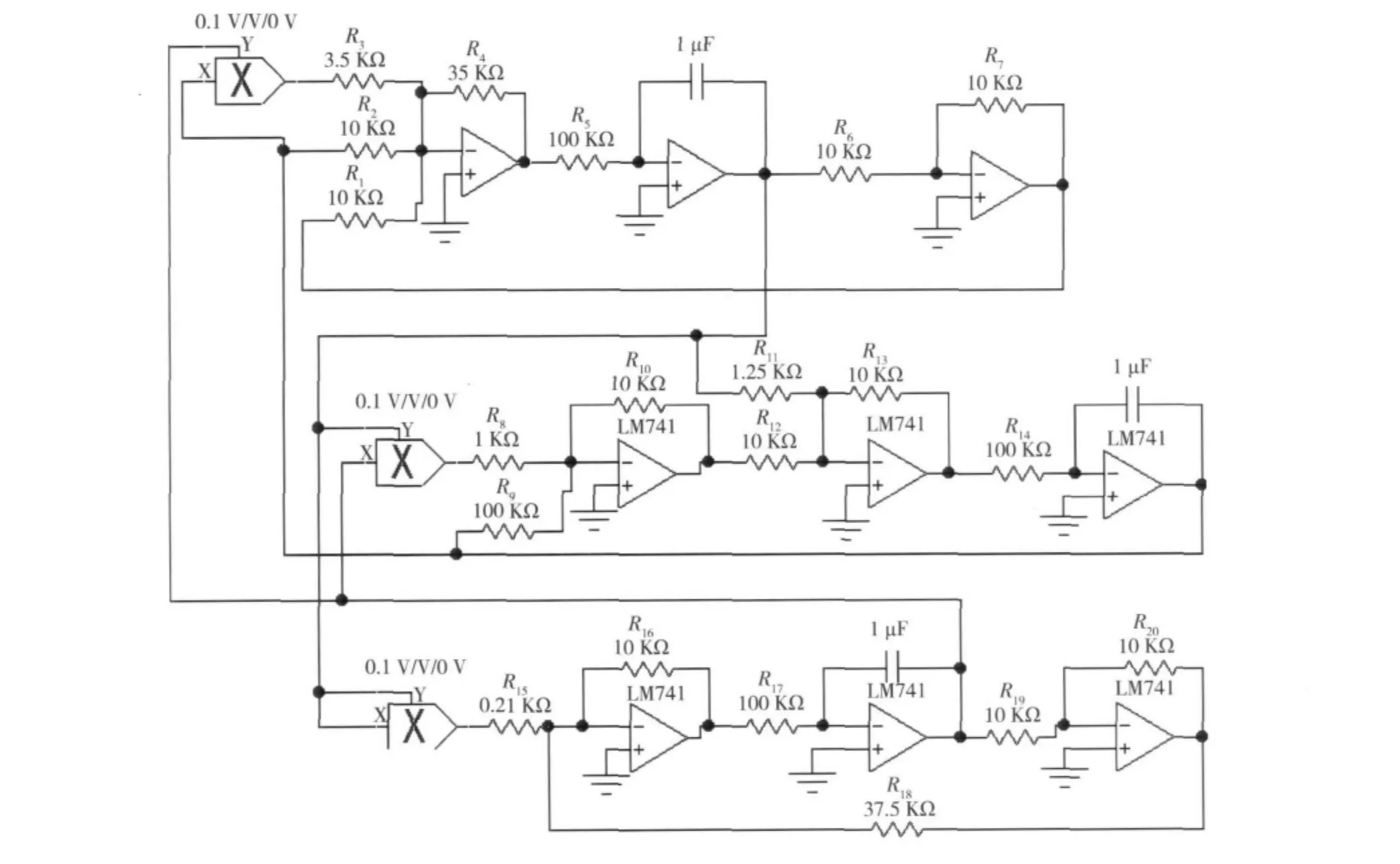
图3 电路原理图Fig.3 Circuit diagram of system(1)
图3中:
上述的理论分析、数值仿真以及电路系统仿真均证明了本文提出的系统确实是一个新的混沌系统,具有混沌系统共有的一切特征;因为其参数多和电路的可实现性,使得该系统具有更多的潜在的应用价值,如电路的抗干扰性、混沌通信和信息加密等,这将是我们下一步的研究工作。
3 自适应混沌控制
基于LaSalle不变原理,构造一个简单的自适应反馈控制器,将新混沌系统控制到3个不稳平衡点上。
为了稳定新系统的轨道到它的平衡点x*,设计如下自适应控制器[10-11]:

(7)式中,L是一个足够大的正常数,满足L≥nl。
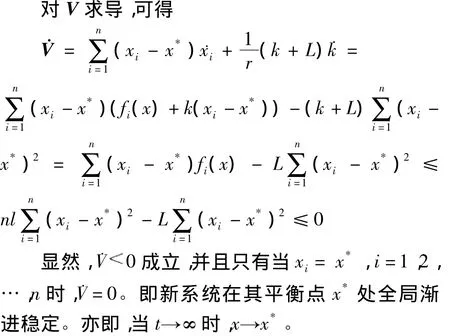
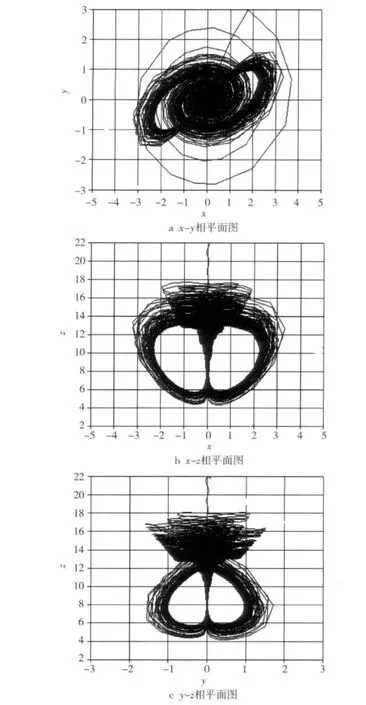
图4 系统(1)的仿真相图Fig.4 Simulation diagrams of system(1)
3.1 零平衡点S0的稳定
我们使用简单单一的控制器,并将控制器加在新系统的第二项上,受控系统(1)变为
令˙k=-ry2,其中,选取时间t的步长为0.000 7,当参数分别a=35,b=8/3,c=80,e=4.8,未加控制的系统(1)处于混沌状态。初始值为x0=1.0,y0=1.0,z0=30,采用 Runge-Kutta离散法求解上面方程,运行10 s后加入自适应控制器(r=1),系统(1)很快被控制在平衡点 S0(0,0,0)上(见图5)。通过系统的坐标转换,利用这个方法也可以将新系统控制到其他不稳平衡点上。
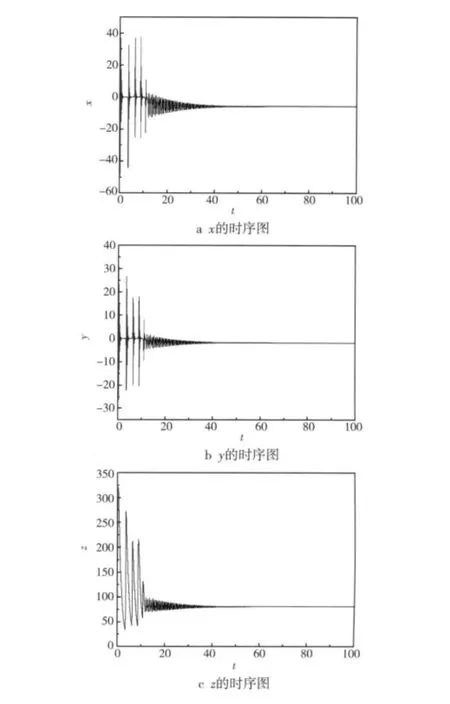
图5 控制系统(1)到零平衡点S0(0 0 0),在t=10 s时加入控制Fig.5 Stabilization of the zero equilibrium point S0(0 0 0)for system(1),the control is activated at t=10 s
3.2 非零平衡点S1,S2的稳定
我们仍使用简单单一的控制器,并将控制器加在新系统的第2项上,令u=k(y-y*),受控系统(1)变为

(9)式中,¯k=-r(y-y*)2。时间t的步长、系统参数、控制器参数r及初始值的选取与上面相同。当y*= -2.030 5时,系统(1)被控制在S1(-6.653 9,-2.030 5,79.694 8)上(见图 6);当y*=2.030 5时,系统(1)被控制在S2(6.653 9,2.030 5,79.694 8)上(见图7)。

图6 控制系统(1)到平衡点S1(-6.6539,-2.0305,79.6948),在t=10 s时加入控制Fig.6 Stabilization of the equilibrium point S1(-6.6539,-2.0305,79.6948)for system(1),the control is activated at t=10 s
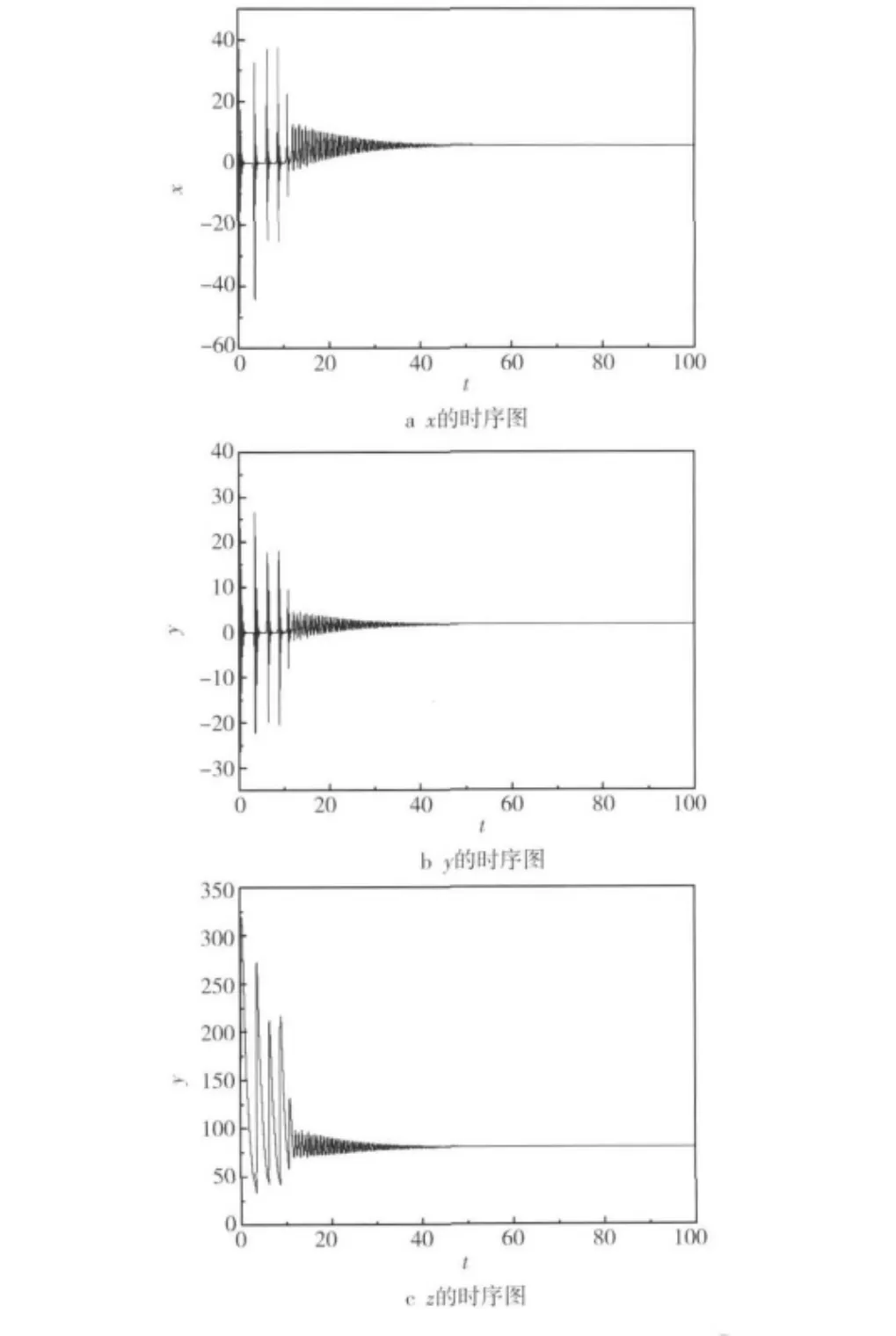
图7 控制系统(1)到平衡点S2(6.6539,2.0305,79.6948),在t=10 s时加入控制Fig.7 Stabilization of the equilibrium point S2(6.6539,2.0305,79.6948)for system(1),the control is activated at t=10 s
4 结论
本文基于Qi系统提出了一个新的三维自治混沌系统,该系统含有4个参数,每个方程中各含有一个非线性乘积项。数值仿真和电路仿真发现该系统的混沌吸引子形状有别于Qi系统和其他Lorenz系统、Chen系统等。计算了该系统的平衡点及其稳定性,通过理论分析、数值仿真、电路仿真验证了该系统丰富的动力学特性。基于LaSalle不变原理,构造一简单的自适应反馈控制器,将新系统控制到平衡点。数值模拟证实了控制方法的有效性。新系统的参数较多,并且可以用电子振荡器电路来实现,所以它在电子测量、图像数据加密、保密通信等领域中具有潜在的应用价值,也是作者后续研究的工作。
[1]LORENZ E N.Deterministic Non-periodic flows[J].Atmos Sci,1963,20(1):130-141.
[2]CHUA L O,KOCAREV L J,ECKERT K.Experimental chaos synchronization in Chua's circuit[J].International Journal of Bifurcation and Chaos,1992(2):705-708.
[3]CHEN Guang-rong,UETA T.Yetanother chaotic attractor[J].International Journal of Bifurcation and Chaos,1999,9(7):1465-1466.
[4]LIU Chong-xi,LIU Tao,LIU Ling,etal.A new attractor[J].Chaos,Solitons and Fractals,2004,22(2):1031-1038.
[5]王繁珍,齐国元,陈增强,等.一个新的三维混沌系统的分析、电路实现及同步[J].物理学报,2006,55(80):4005-4016.
WANG Fan-zhen,QIGuo-yuan,CHEN Zeng-qiang,et al.Analysis,circuit implementation and synchronization of a new three-dimensional chaotic system[J].Acta Phys.Sin.,2006,55(80):4005-4016.
[6]胡岗,萧井华,郑志刚.混沌控制[M].上海:上海科技教育出版社,2000:34-35.
HU Gang,XIAO Jing-hua,ZHENG Zhi-gang.Chaos control[M].Shanghai:Shanghai Scientific and Techenological Education Publishing House,2000:34-35.
[7]许明清,王忠林,邓斌,等.一个四翼混沌系统的设计与电路实现[J].重庆邮电大学学报:自然科学版,2011,23(1):328-330.
XU Ming-qing,WANG Zhong-lin,DENG Bin,et al.Design and circuit realization of a four-wing chaotic system[J].Journal of Chongqing University of Posts and Telecommunications:Natural Science Edition,2011,23(1):328-330
[8]WU Shu-hua,HAO Jian-hong,XU Hai-bo.Controlling chaos to unstable periodic orbits and equilibrium state solutions for the coupled dynamos system[J].Chinese Physics B,2010,19(2):020509-8.
[9]孙连新,王忠林,韩敬伟.一个新的三维混沌系统分析及电路实现[J].四川兵工学报,2010,31(2):116-118.
SUN Lian-xin,WANG Zhong-lin,HAN Jing-wei.Analysis and Its Circuit Realization for a New Three-dimensional Chaotic Systrm[J].Journal of Sichuan Ordnance,2010,31(2):116-118.
[10]GUO Rong-wei,VINCENTU E.Control ofa unified chaotic system via single variable feedback[J].CHIN PHYS LETT,2009,26(9):090506-4.
[11]HUANG De-bin.Adaptive-feedback control algorithm[J].PHYSICAL REBIEW E,2006,73:066204-8.
(编辑:魏琴芳)
