基于操作手柄新模型的电动轮椅运动控制系统
2012-02-22马瑞卿史国栋相里康
张 琳,马瑞卿,史国栋,相里康
(1.西北工业大学,陕西西安710072;2.济宁中银电化有限公司,山东济宁272000)
0 引 言
纵观现阶段电动轮椅技术,其控制策略的研究远滞后于硬件驱动的发展。现有的驱动策略相对简单,只设前后左右四个方向档位,无法进行方向转角跟随[2],需要实时手动控制,这不符合自动驾驶系统设计的初衷;而在电动轮椅的基础上,结合智能机器人技术而具备避障等功能的智能轮椅已成为未来发展的重要方向,这对电动轮椅运动控制策略也就提出了更高的要求。
针对电动轮椅控制系统智能化的发展趋势,在操作手柄新模型基础上,本文对现有的控制策略进行了改进,设计了一种新的控制模式,以主从电机转速跟随算法、方向转角位置闭环算法为核心,对双电机进行独立驱动控制,使电动轮椅可在非实时手控操作下完成直线运行、方向转角跟随、原地回转等功能。
1 操作手柄新模型
1.1 操作手柄硬件设计
市场上电动轮椅的操作手柄由方向摇杆与速度选择按键组成。其中方向摇杆设置前后左右四个方向档,速度选择按键是数字电位计。其开环控制策略相对简单,对应方向摇杆的四个档位以及设定的速度,配置了四套的控制指令[2],如表1所示。

表1 电动轮椅的一种典型的控制策略
这种操作手柄与其开环控制相匹配,虽简单可靠,却固定了回转半径,限制了电动轮椅的适用范围;同时开环控制策略要求用户必须时刻手动操纵方向摇杆,限制了轮椅的用户受众。本文对操作手柄提出了以下的改进,新模型如图1所示。
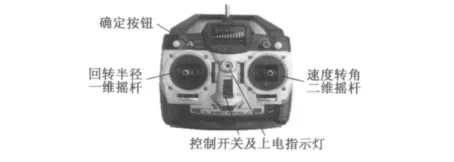
图1 由航模遥控器改造的电动轮椅控制手柄
(1)与方向转角闭环控制相匹配。指令给定模式调整为方向转角外加车体速度的指令集合。
(2)设计了车体速度与方向转角连续可调的速度转向二维摇杆。将摇杆推动至需要的位置后按下确定按键即可,无需实时控制。
(3)可变的回转半径。在操作手柄上设置了回转半径一维摇杆,以便用户根据使用场合调整。
1.2 操作手柄信号处理算法
速度转向二维摇杆输出与位置成线性比例的二维电压信号,作车速与转角的指令集合,非常适合用来控制电动轮椅[3]。用户前/后推动可以连续调节轮椅的车速,左/右推可以连续控制轮椅的转角。通过操作手柄信号处理算法把一个二维信号转换为速度和转向控制指令。
速度转向二维摇杆输出的信号可由图2来表示,X轴代表转角,以向左转为正;Y轴代表车速,以前进为正,最大行车速度设为5 m/s。速度转向二维摇杆是两路互相垂直的电位计,对X轴与Y轴方向电压与转角、转速对应关系的规定如图2所示。二维电压信号落入其中正方形区域,设某输入指令对应A(X,Y)点,通过如图3所示的操作手柄信号处理算法,可得到左右电机的转速转向控制指令。
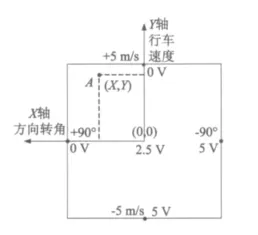
图2 速度转向二维信号模型

图3 操作手柄信号处理算法框图
算法处理过程如下:
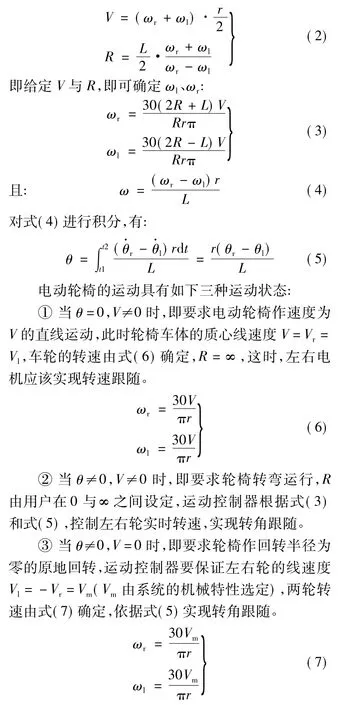
(1)二维电压坐标(X,Y)→二维速度转向坐标(V,θ)。转化结果可由以下公式给出:
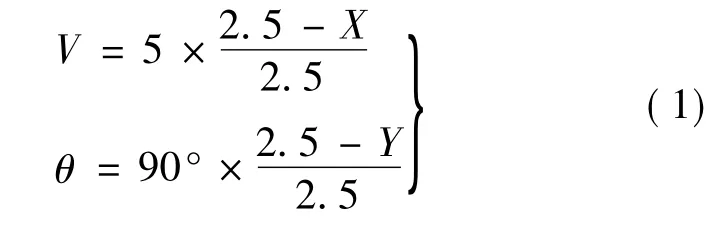
(2)左右电机运行指令的计算
电动轮椅的机械及运动模型如图4所示。两大轮为左右驱动轮,由一对外转子无刷直流电动机直接驱动,前后各有一对小从动轮,在滚动的同时绕对应转轴转动从而实现导向功能,而且后侧的导向轮可以避免后倾,增加车体的稳定性。图中轮椅以O点为中心向左转弯时的情景,V代表电动轮椅的质心速度,ω代表质心的角速度,Vl、Vr分别表示左右轮轮毂的线速度,ωl、ωr分别表示电动轮椅左右轮转速,L为驱动轮间距,r表示驱动轮半径,设由一维摇杆给出的回转半径为R(以向左转弯为正),θ是电动轮椅的车体转弯角度(以向左转弯为正)。假定驱动轮椅相对地面只作纯滚动,由电动轮椅运动学分析可知:
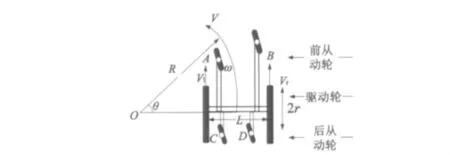
图4 电动轮椅的运动原理示意图
以上分析可知,通过操作手柄信号处理算法,可以得到左右电机转速与转向的控制信号。
2 双电机差动驱动控制模式
操作手柄新模型的原理部分已证,无需电动轮椅的运动轨迹,通过左右两轮的转角差即可控制车体的转向,这就为方向转角闭环控制奠定了基础。
2.1 无位置传感器的电机转角算法
为实现转角的闭环控制,首先应得到电机的转角,传统的电机位置控制系统大多采用光电码盘等位置传感器,成本高、机械机构复杂[2]。本文充分利用无刷直流电动机的霍尔转子位置传感器,通过对霍尔脉冲计数以及对中断间隔计时的方法[4],可得到较高精度的电机转角。
将电机的三个霍尔信号送入单片机的电平变化通知引脚,则电机每旋转60°的电角度单片机都会产生一个引脚中断,在中断程序中通过霍尔信号的代码判断电机的转向并进行有方向的计数,依据计数变量的数值与符号即可间接得到电机转角。
然而,这种转角算法存在60°电角度的误差,本文提出了一种便捷的改进方法。在每个管脚中断程序中加入了计时器操作,在任意时刻通过读取定时器即可得到距上一中断时刻的时间,依据当前转速计算该时间段内电机转角,从而修正中断计数法的转角误差。以左电机转角的计算为例,具体计算过程如下:

式中:hcountL为左电机的位置标志变量;signL为左电机的转向标志变量,其中1表示正转,-1表示反转;ωL为当前左电机的速度;T为左电机中断间隔计时器的数值;θL为左电机的转角;30°是2对极电机,则60°电角度相当于30°的机械转角;FCY/256为定时器的时钟频率。
其算法流程框图如图5所示。
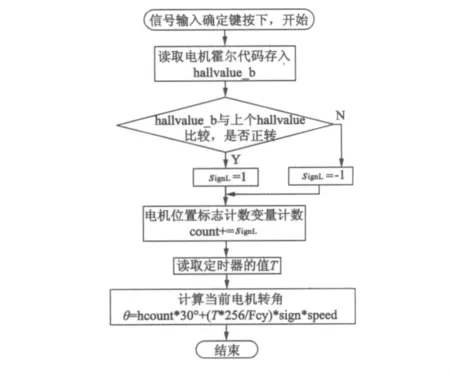
图5 电机转角算法的软件流程图
2.2 位置闭环控制
要实现电动轮椅的三种运动状态(直线运动、转弯以及原地回转),控制器需具备以下的功能:直线行驶时主从电机转速跟随,转弯时导向电机转角位置闭环。
2.2.1 主从电机转速跟随算法
电动轮椅直线行驶时,要求左右驱动轮以相同速度转动,但两电机的输入指令一样,也不能保证两驱动轮的速度相同;加之响应时间的延迟、受力不均等原因,即使两轮实时速度等同也无法保证其直线运行[2]。这就需要引进一个补偿系统,对两轮转过的角度累计比较,使轮椅在出现微小的偏移后,能够自行调节方向,维持初始方向沿直线运动。
将左轮定义为主动轮,右轮为从动轮。将主从电机各自的转子霍尔位置信号送入单片机,计算各轮当前转向、转速[5]、累积的转角位移,并根据左右电机转角位置差以及实时转速差来计算得出从动电机的转速控制信号,并保证左右两车轮滚过相同的距离。从动电机转速控制图如图6所示。
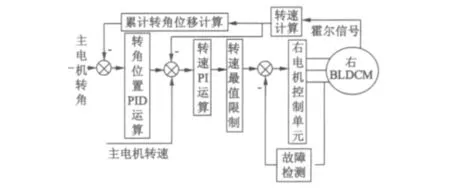
图6 从动电机转速控制图
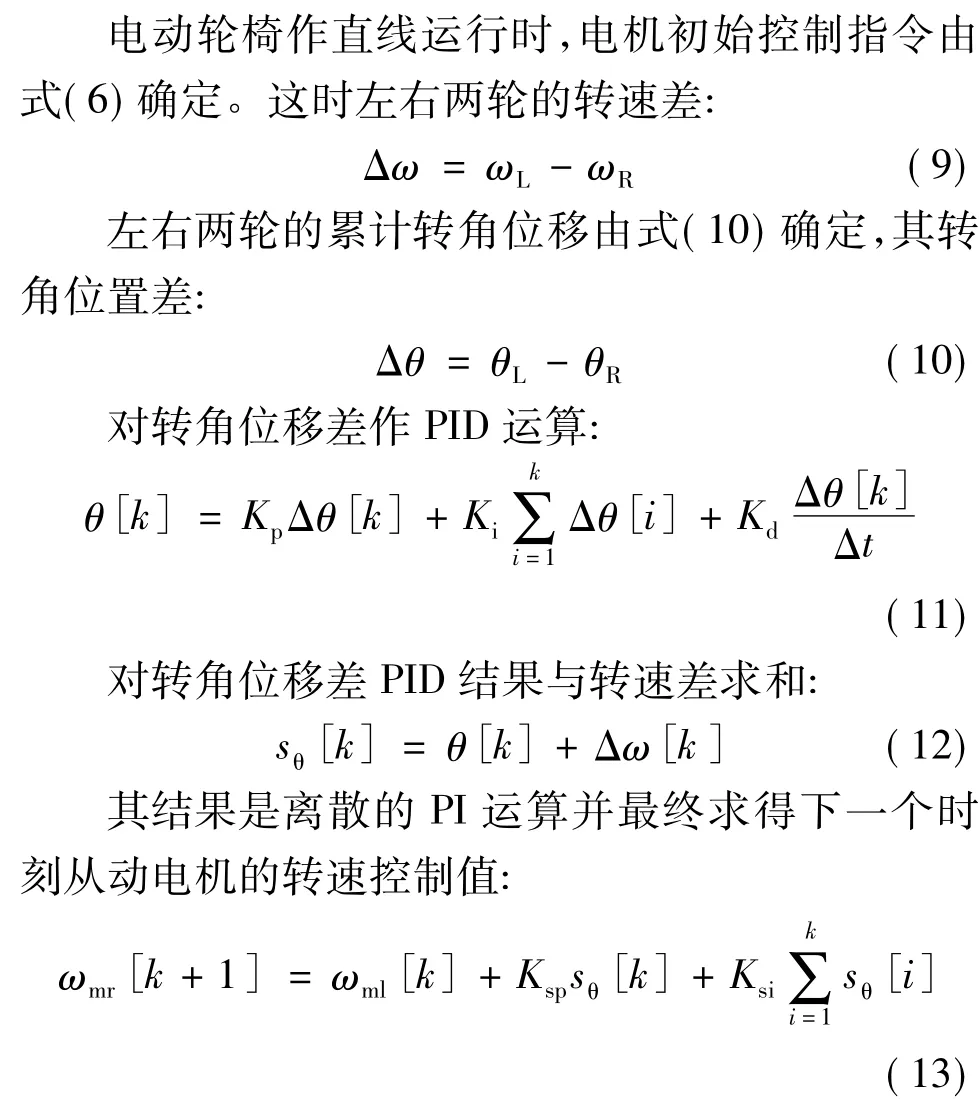
式中:ωL、ωR为左右电机转速;ωml、ωmr为左右电机给定转速;θL、θR为左右电机转角位移;Δθ为左右电机转速之差;Δt为单位时间差;sθ为转角位移差与转速差的运算量;Kp、Ki、Kd为PID运算中比例项、积分项、微分项系数;Ksp、Ksi为 PI运算中比例项、积分项系数。
2.2.2 电动轮椅转角闭环算法
电动轮椅转弯或者原地回转,都可以归纳为不同回转半径下的转弯运动。为了减少操作指令,需要对车体方向转角(即左右电机的转角差)进行闭环控制,使左右电机实现差速定向。
由于转角位置闭环是以标记电机初始位置为基础的,为方便输入指令的及时更新,避免误操作,速度转向二维摇杆可自动复位,添加了确认键,确认信号送入优先级较高的单片机外中断管脚。当电动轮椅完成差速定向后,轮椅会以原速度做继续直线运动,直至用户更新操作手柄指令。转角闭环算法写在了管脚的中断程序里,如图7所示。
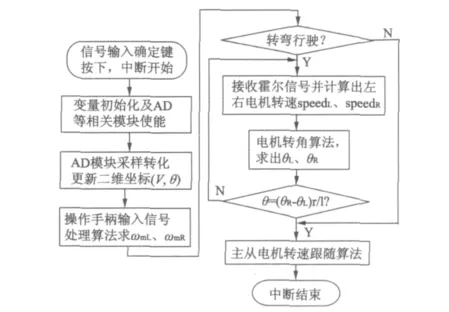
图7 转角闭环算法的软件流程图
3 运动控制系统新型控制策略的实现
依据上述的控制思想,本文所设计的运动控制器如图8所示:样机由操作手柄、主控单片机dsPIC30F、左右电机控制单元(MC33035与MC33039配合),无刷直流电动机驱动以及保护单元、显示单元(LED)等模块[6]构成,两对极的无刷直流行星齿轮电机36ZWN60-2420,其传动比为3.82∶1。
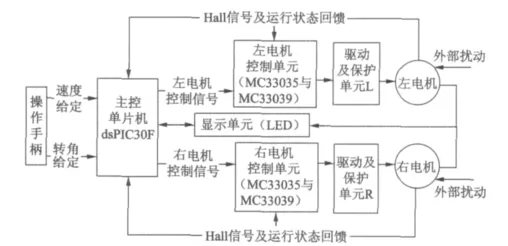
图8 电动轮椅控制系统结构框图
4 控制策略的验证
对电动轮椅的三种运动状态,即直线运动、转弯、原地回转进行实验,通过两电机运行状态来验证控制策略的有效性。
如图9所示,控制单元中三相霍尔信号送入测速芯片MC33039,5脚是转速输出脚,通过其波形频率可得电机转速:
式中:n为转速;f为5脚输出PWM波频率;p为电机极对数,实验样机中为两对极电机。
数码管也可以在左右电机的实时转速与输入转角及实际转角之间切换显示,这些硬件设计都为检测在不同输入信号下两电机的运动状态提供了方便。对于电动轮椅运动系统,驱动轮半径0.20 m,驱动轮轮距为0.60 m。
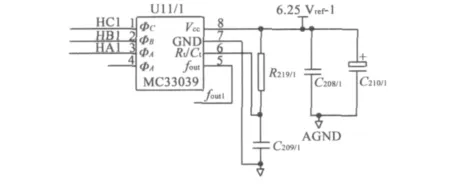
图9 控制单元中测速部分电路图
4.1 直线行驶主从电机转速跟随的验证
直线行驶时,对操作手柄输入指令θ=0°,V=5 m/s时,位置闭环控制策略要求此时左右轮电机做转速跟随运动。
根据式(6)理论值,左右车轮转速为239 r/min,图10表示直线行驶的验证结果,图10(a)表示左右两路MC33039的5脚输出波形的频率为184.8 Hz,依据式(14)折合成左右电机转速分别为906 r/min与924 r/min,与图10(b)表示经减速器后电机的输出转速分别为238.5 r/min与241.0 r/min,符合主从电机跟随。
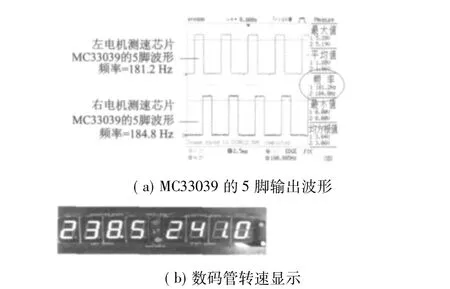
图10 直线行驶时转速跟随验证
4.2 转弯运动时角度闭环的验证
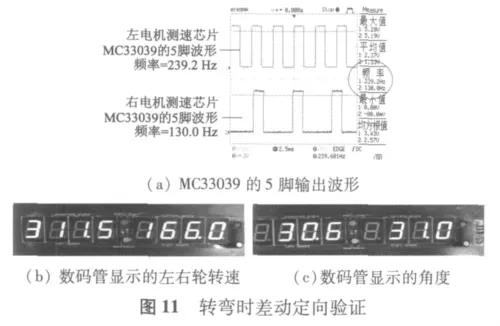
转弯行驶时,位置闭环操作控制要求双电机差速驱动。输入信号给定为回转半径R=1 m,θ=30°,V=2.5 m/s。
根据式(3),计算左右车轮转速理论值分别为310.4 r/min与167.1 r/min。实验结果如下:图 11(a)显示左右两路5脚输出波形的频率理论值为239.2 Hz、130.0 Hz依据式(14)折合左右电机转速对应为1 196 r/min与650 r/min;图11(b)显示经减速器后电机的输出转速为311.5 r/min与166.8 r/min;由图11(c)可知,数码管显示用户输入的方向转角为 30.5°,实际转角为 31.0°。
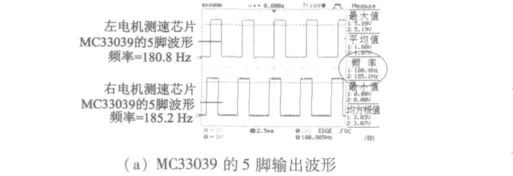
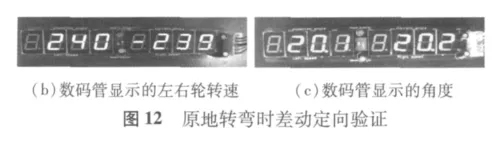
4.3 原地回转运动时角度闭环的验证
原地回转运动即回转半径R=0时的转弯运动,双电机同样差速定向驱动。输入信号给定为θ=20°,V=0,车轮线速度设为 Vm=5 m/s。
根据式(7)以及式(14)理论值:两路MC33039的5脚输出频率为182.4 Hz;左右轮以239 r/min的转速分别正反转,实测数据如图12所示。
5 结 语
本文以实现更为人性化、智能化的电动轮椅运动控制系统为研究目的,对以方向转角闭环控制为核心的控制模式进行了详细论述,并以此为依据,制作了控制器样机加以验证。实验结果证实,电动轮椅直线行驶、转弯运动、原地回转等运行状况下,双电机基本可以实现转速跟随、差速定向等功能,不考虑到摇杆的精度以及响应延迟等误差因素,从而验证了该控制思想的有效性与合理性。
[1] Ding D,Cooper R A.Electric powered wheelchairs[J].IEEE Control System Magazine,2005(25):22-34.
[2] 王晓旭,杨振强,张涛.基于ATmega48的电动轮椅主从控制系统设计[J].电机技术,2010(4):47-50.
[3] 马小珍.电动轮椅控制系统设计[D].武汉:华中科技大学,2006.
[4] 皇甫宜耿,马瑞卿,杨永亮.具有自动定位的航空无刷直流直线作动系统[J].计算机测量与控制,2006,14(5):630-63.
[5] 毕海悦,张东来.一种无刷直流电动机的在线转速估计方法[J].微特电机,2008,36(11):7-8.
[6] 周勇,李声晋,田海波,等.四轮独立驱动电动车的控制器设计[J].微特电机,2008,37(2):31-34.
