一种开关磁阻电动机无位置传感器起动方法
2012-02-22邹东坡邓智泉
邹东坡,邓智泉,蔡 骏
(南京航空航天大学,江苏南京210016)
0 引 言
开关磁阻电动机(以下简称SRM)以其结构简单、体积小、效率高、调速范围广等优点在许多领域内得以广泛应用。对于开关磁阻电动机驱动系统(以下简称SRD)而言,实时准确的位置信息是其可靠运行的重要保障。目前大多数SRM采用光电传感器、磁敏传感器等轴位置传感器获取转子的实时位置信息,不仅增加了电机结构和控制系统的成本和复杂性,在一些特殊工作条件下(如高温、油污),其可靠性也不能得到较好的保障。因此直接利用绕组的电流、电压获取电机转子位置信息,研究高效率、低成本、高可靠性的无位置传感器技术已成为一大热点问题。
目前,各国学者针对SRM起动的问题,提出各种无位置检测和控制方案。文献[1]采用磁链-电流查表的方法,事先存储磁链-电流-角度的三维数据表,根据检测电流值和电压值,计算磁链,然后实时查表获得电机转子的角度信息。这种方法的缺点是三维表的存储将会占用控制芯片大量内存。文献[2]采用磁链电流法,起动前将一相绕组通电,使其定转子对齐后,再完成起动。在转子初始位置不确定的情况下,起动前可能会引起电机反转。这在某些特殊的应用场合是不允许的。文献[3]在起动前向电机各绕组注入短时脉冲,通过响应电流与设定的电流阀值大小相比,获得各相绕组开通关断信号。但电流阀值需要根据不同的电机本体参数设定,通用性不强。文献[4]采用拟合电感模型的方法,实时解算出转子位置角,从而控制电机各相的开通关断。拟合电感模型的控制算法相对复杂,通过模型解算出的实时角度信息存在一定的计算误差。文献[5]在起动前对各绕组注入脉冲,根据响应电流与电机电感曲线对应的变化关系,对响应电流幅值进行滤波,得到电流变化的包络线,再通过设定阀值确定开通关断信号。文献[6-7]在一个电感周期内,根据各相电感的交叠,划分为几个区间。在每个区间内根据各响应电流的逻辑关系确定驱动信号。文献[8-9]将电感曲线近似为正弦,合成空间旋转矢量,通过矢量分解解算出转子的实时位置。电感曲线作为正弦曲线处理,解算出的转子位置存在一定的误差。
针对SRM现有的无位置起动方法及其存在的缺点,本文提出了一种新的起动方法。起动前对电机三相绕组注入脉冲,利用响应电流的大小关系确定初始导通相。在一相导通时,利用非导通相电流的关系,确定换相点,实现电机的换相。换相后,续流相电流不进入算法比较,当电流降到一定数值等级以下,再进入比较判断,因此需要在算法中设置电流阀值。该方法控制逻辑相对简单,采用三相轮流导通的方法,迅速、有效地完成SRM的起动。仿真和试验验证了算法的可行性。
1 非导通相电流法理论基础
SRM的相电感随着转子角度不同而周期性地变化,因此电感的变化可以反映转子角度信息,从而可以决定各相驱动信号的通断。目前,国内外研究较多的无位置起动方法是基于SRM电感的控制算法,而电感的计算需要响应电流和相电压。在一定的条件下,SRM相电感和响应电流可以近似成反比,因此通过各相电流和电压信号,也可以直接反映电机转子的角度信息,从而确定换相驱动信号。
非导通相电流法的实现,是建立在以下理想假设的基础上:
(1)定子绕组完全对称,各相电感理想对称;
(2)绕组电阻足够小。
在上述条件下,通过以下步骤完成初始导通相的判断。
(1)向电机各相绕组施加一个短时脉冲激励;
(2)将各相响应电流的大小比较排序;
(3)根据所得的逻辑关系对应到电感关系,从而确定初始导通相。
控制算法流程图如图1所示。

图1 初始导通相判断流程
SRM一相绕组的电压方程可表示:

而磁链方程:

将式(2)代入式(1),可得:

电机静止时,ω=0,且忽略绕组电阻R的影响,

式(6)中t0为可施加的最大脉冲时间,t0过大可能使电机转子出现转动,过小可能无法检测响应电流。
表1为初始导通相的选择逻辑表,在电机起动前,向各相绕组同时注入脉冲电压,根据响应电流的逻辑关系,确定转子位置所在的角度区间,从而确定初始导通相。

表1 初始导通相选择逻辑表
由式(6)可知,给定等幅电压脉冲U和注入时间Δt,检测到的响应电流Δi的包络线和电机各相电感值L成反比变化,如图2所示。由图2可见,三相响应电流的交叠点,对应了电机三相电感的交叠点。低速运行时,忽略旋转反电势,在每相的0~22.5°范围内,电感处于上升区,均可以产生正转矩。响应电流幅值的包络线,将一个电感区间分为6个小区间。每个区间内的电流逻辑关系不同,从而确定不同相的导通关断信号。控制逻辑如表2所示。在一相电感的上升区内,非导通相电流的交叠点对应了 7.5°、15°和 22.5°三个特殊位置点,而导通相的电流,远大于非导通相注入脉冲的响应电流,无法确定换相点,对控制算法没有意义。因此利用非导通相电流信号,可以确定导通相的开通与关断,实现7.5°~22.5°的导通。

以A相为例,A相的开通信号由A、C两相电流大小关系决定。当ic>ia时,即 θa=7.5°时,A相开通。此时A相导通,电流迅速建立,B、C相继续注入脉冲电压。因此A相电流将不能作为比较信号,A相的关断信号需要通过非导通相B、C相电流关系决定。当 ib> ic时,即 θa=22.5°,A 相关断,同时C相导通,此时A相关断,进入续流阶段,其电流等级远大于非导通相的响应电流,此时续流相电流参与比较运算将会造成控制逻辑混乱,导致错误的换相信号,因此控制算法中需要设定电流阀值。续流相的电流要减小到脉冲响应电流幅值以下的范围内才可参与比较运算,因此电流阀值可设定为响应电流幅值以下的数值。阀值过大,在响应电流幅值附近,则可能由于采样误差导致比较运算错误,从而产生错误的换相信号;阀值过小,则续流相进入比较运算较迟。因此可以取响应电流幅值的一半,当续流电流值减小到阀值以下,再进入比较环节,与B相电流比较,从而确定C相的关断信号。由此产生A-C-B相序下的连续转矩,使电机达到一定转速。

表2 低速运行下控制逻辑表
由表2可见,提出算法的控制逻辑简单,在初始导通相确定以后,仅需要对非导通相的电流实时检测比较,即可获得换相信号。
2 仿真分析
为了验证本文提出算法的可行性,利用MATLAB中的Simulink模块搭建三相12/8 SRM模型。母线电压30 V,起动后低速运行未采用电流斩波控制方式。
图3为非导通相电流起动方法无阀值时的起动电流波形。由于控制算法中缺少阀值,使得B相续流时,导通相判断错误,导致相序由B-A-C变为B-C-A。三相电流波形混乱,A相在22.5°~45°电感下降区导通,B、C相也存在类似情况,电机不能正常运转。
图4为非导通相电流起动方法附加阀值修正的起动电流波形。电机按照B-A-C相序运行良好,三相轮流导通,各相导通区间均为 7.5°~22.5°,导通区间对称,实现了非导通相电流法的正确换相。仿真验证了所提出算法的可行性。

3 实验验证
对于本文提出的控制算法,我们在三相12/8 SRM样机上进行实验验证。图5为不增设电流阀值的实验波形,B-A-C三相轮流导通,但是导通区间不对称,电流波形不规则,在每相电感下降区都有导通时段,从而产生负转矩,影响电机起动性能。
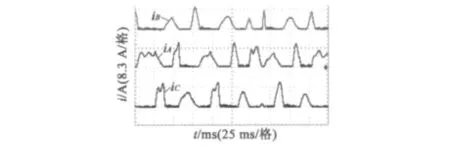
图5 无阀值控制的三相电流波形
图6为增设电流阀值后的三相电流波形。导通区间对称,实现B-A-C三相轮流导通,避免了在电感下降区导通所产生的负转矩。传统无位置算法建立在导通相电流的基础上,其算法通常忽略电流过大引起的电感饱和。本文提出的控制算法相对简单,利用非导通相电流获得换相信号,导通相电流不作比较运算,避免了电流过大造成电感饱和所导致算法的精确性降低,因此算法也适用于电机的带载起动。

图6 有阀值控制的三相电流波形
4 结 语
本文提出了一种利用非导通相电流的三相12/8SRM无位置起动的方法,并通过仿真和实验予以验证。在提出算法的基础上又做以算法改进,增设阀值比较环节,消除了误导通信号,从而避免了负转矩的产生。控制算法摒弃了传统无位置方法通过电流、电压信号计算电感的理念,拓宽了SRM无位置算法在起动问题上的应用,在实践中对SRM的起动控制具有相当的意义。由于利用非导通相电流逻辑比较,获得的换相信号仅对应于转子的几个特殊位置角,因此导通区间局限于 7.5°~22.5°,不能在 0°位置处换相,起动电流建立较慢是提出算法所需要进一步解决的问题。
[1] 胡达平,谢顺依,刘小虎,等.无位置传感器开关磁阻电机的无迟滞起动研究[J].微特电机,2004(7) :8-10.
[2] Bu J,Xu L.Eliminating starting hesitation for reliable sensorless control of switched reluctance motors[J] .IEEE Transactions on Industry Application,1998(1):693-700.
[3] 王大方,谢顺依.无位置传感器开关磁阻电机的转子位置检测与起动[J].海军工程大学学报,2004,16(2):15-18.
[4] 陈坤华,孙玉坤,吴建兵,等 .基于电感模型的开关磁阻电机无位置传感器技术[J].电工技术,2006,21(11):71-75.
[5] 邱亦慧,马志源,詹琼华,等.无位置传感器开关磁阻电机的无反转起动研究[J].电工技术学报,2001,16(2):18-22.
[6] Trakarancharoungsook K,Kittiratsatcha S.Position estimation technique of a switched reluctance motor at standstill[C]//Power Convertion Conference.2007:264-270.
[7] Gao H,Salmasi F R,Ehsani M.Sensorless control of SRM at standstill[C]//Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition.2001,2(4-8):850-856.
[8] Bamba T,Komatsuzaki A,Miki I.Estimation of rotor position for switched reluntance motor at standstill[C]//Power Convertion Conference.2007:259-263.
[9] Miki I,Komatsuzaki A,Yoshida K.A new sensorless control for switched reluntance motor[C]//2005 European Conference on Power Electronics and Applications.2005:10-14.
[10] 刘迪吉.开关磁阻调速电机[M].北京:机械工业出版社,1994.
