3-UPS并联机器人工作空间研究*
2012-02-05颜兵兵刘秀民解明强殷宝麟
颜兵兵,刘秀民,解明强,殷宝麟
(1.佳木斯大学机械工程学院,黑龙江 佳木斯 154007;2.哈尔滨东安汽车动力股份有限公司,哈尔滨 150066)
3-UPS并联机器人工作空间研究*
颜兵兵1,刘秀民2,解明强1,殷宝麟1
(1.佳木斯大学机械工程学院,黑龙江 佳木斯 154007;2.哈尔滨东安汽车动力股份有限公司,哈尔滨 150066)
基于3-UPS并联机器人为研究对象,分析了基座与动平台之间支链连杆的长度对3-UPS并联机器人工作空间的限制。采用三维搜索法确定工作空间边界。通过Matlab编程绘制出3-UPS并联机器人的灵活工作空间,同时研究了并联机器人机构模型参数与工作空间之间关联性。为并联机器人的结构设计和进一步研究奠定了基础。
3-UPS;并联机器人;工作空间
0 引言
与传统的串联机构相比,并联机构具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,因而扩大了整个机器人的应用领域。各种形式的并联机构在机器人中得到了应用,继串联操作臂和并联平台之后又出现了并联柔索机器人[1]。现有对并联机构的研究大多数仍然集中在6自由度Gough(Stewart)机构上。但是,许多工程的应用并不要求运动平台一定要有6个完整的自由度。减少机构的自由度数将会降低机构的总体费用[2]。因此,相对多自由度并联机构而言,少自由度并联机构更具实际应用价值,出现了各种不同的3自由度并联机构。针对3-RPS并联机构的工作空间,西安理工大学利用分层处理方法将工作空间划分为多个子空间,利用拟球坐标搜索法确定子空间的边界区域,并且对整个工作空间进行了定量计算[3]。西安文理学院分析了影响平面3-RPR并联机器人工作空间的因素,采用快速极坐标迭代搜索的方法来确定其工作空间。计算可达工作空间时减小迭代步长可显著提高计算精度。基于快速极坐标迭代搜索法,研究了构型参数与工作空间的关系[4]。华中科技大学研究了3-UPU工作空间、奇异特性以及工作空间与并联机器人的几何参数之间的关系。研究结果对并联机器人的优化设计起到重要作用[5-6]。
为提高拱泥机器人在海底泥土中运动灵活性,根据其运动特性设计出一种3-UPS并联机构,针对该机构进行了位置分析,利用三维搜索法对该机构的工作空间和机构参数对工作灵活空间进行了分析,为拱泥机器人的进一步研究提供理论依据。
1 3-UPS并联机器人的位置解法
3-UPS并联机器人的原理示意图如图1所示,主要部件为动平台、基座和3个Di支链连杆和1个支链ObOm,其中3 个 Di支链 UiSi(i=1,2,3)为驱动杆,而联接动平台中心与基座中心的支链ObOm为从动杆。动平台、基座与支链连杆分别通过球副、胡克铰链进行约束。动平台与基座之间通过移动副进行约束[7]。
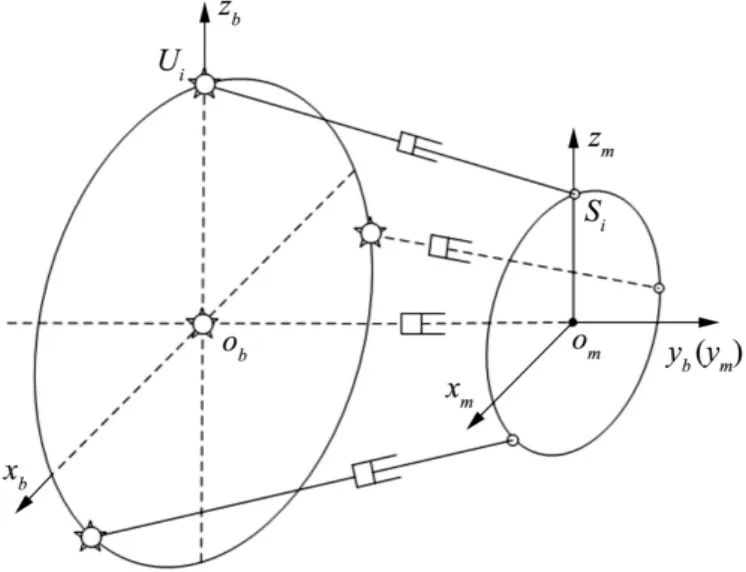
图1 3-UPS并联机器人的原理示意图
建立基坐标系Ob-xbybzb和动坐标系Om-xmymzm。其中,基坐标系和动坐标系的xb(xm)和zb(zm)轴分别位于基座平台与动平台上,并且垂直于yb(ym)轴。动平台和基座上各个顶点连线组成正三角形。结构参数如下:rm为Om与Si两点之间的距离,rb为Ob与Ui两点之间的距离,l为支链连杆UiSi初始长度。3-UPS并联机器人具有3个自由度(α、β、s),分别为沿着xb轴和zb轴的转动以及yb轴的移动。
2 机构的工作空间
由于受到机械结构的限制,并联机器人各个支链连杆长度不是随意的,连杆长度被约束在一定的范围内,设各个支链连杆的杆长为li,最大值为limax,最小值为limin,则机构实际工作时杆长li应满足下列约束条件:

并联机构的动平台通过球面副与各个支链连杆相连,而基座通过万向节与各个支链连杆相连。鉴于机械本体结构的限制,实际工作中球面副和万向节的转角范围是有限的,因此设3-UPS并联机构的每个支链UPS关节的转角为θi,在结构设计时UPS各支链的转动关节的转角范围为θimin~θimax,转角约束条件为:

在并联机构末端执行器上选择一点作为参考点,利用Pro/E软件进行干涉检测,找到关节的转角θi的取值范围,使机构在此范围内不会发生运动干涉。当给定动平台的位姿后,利用机构运动学模型求出各支链连杆的长度li,将各支链连杆的长度li与约束条件进行比较。若无法满足约束条件,则此时的位姿是不可能实现的。若满足约束条件,那么此时末端执行器的参考点位于工作空间内。
本文采用三维搜索法确定3-UPS并联机器人的工作空间边界。具体方法如下:
(1)末端执行器所能到达的空间即为搜索空间。由于机构是沿着xb、zb轴转动和yb轴移动,因此将动平台工作空间用平行与Ob-xbzb面的平面分割成Δy的子空间,在给定基坐标系yb方向的坐标值的情况下,让动平台先沿xb轴旋转α,然后沿zb轴旋转β。
(2)对于yb值一定的每一子空间,使动平台转动,利用α、β在约束(3)基础上进行搜索,得到动平台的工作边界。完成某一子空间搜索后,再进行y方向增量为Δy的子空间进行搜索,搜索从ybmin一直搜索到ybmax为止。ybmin与ybmax为工作空间的最低点和最高点。
3-UPS并联机构的结构中,基座半径 rb为150mm,动平台半径rm为80mm,连杆初始长度limin为367mm,极限长度 limax=437,伸长量 Δl为70mm。关节转角 -10°= θimin≤θi≤θimax=10°。以 Om点为参考点,采用上述分析方法对参考点所能到达的工作空间进行搜索,结果如图2所示。
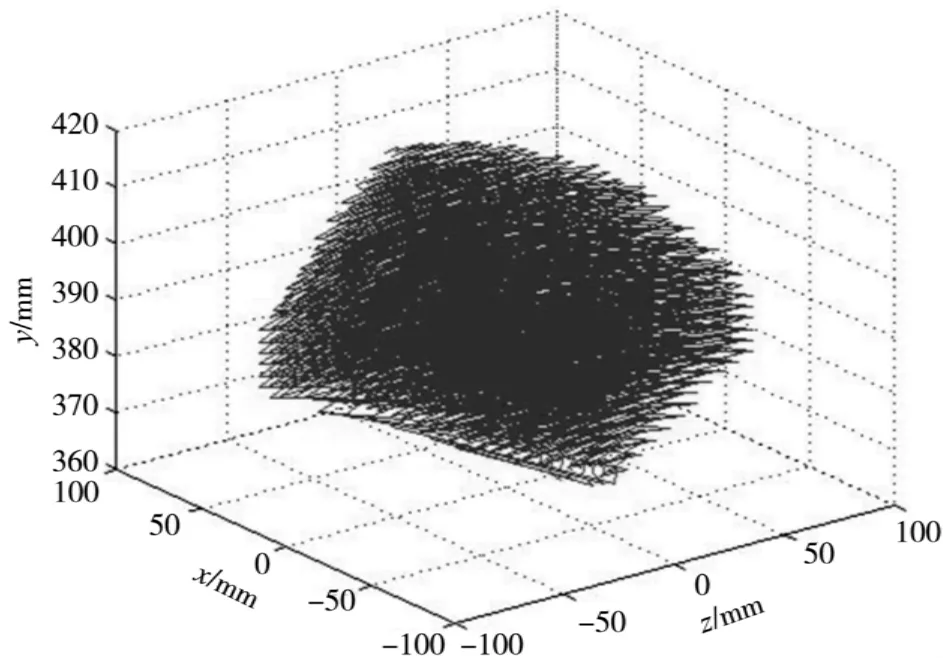
图2 3-UPS并联机构工作空间边界面
由图2可知,影响3-UPS并联机构工作空间的边界来源于三个方面:旋转角度α和β分别限制了平面ybobzb和xbobyb两侧的边界;当驱动杆最短时限制了3-UPS工作空间的下部边界;当驱动杆长度达到最大值时限制了3-UPS工作空间的上部边界。
3 机构参数与工作空间的关系
由3-UPS并联机构的几何模型可计算得到:

利用Matlab软件对式(4)、(5)进行仿真运算,结果如图3所示。当伸长量Δl取一定值时,旋转角度α、β对机构工作空间的影响如图4所示。当伸长量Δl和旋转角度α取一定值时,旋转角度β对机构工作空间的影响如图5所示。同样,当伸长量Δl和旋转角度β取一定值时,旋转角度α对机构工作空间的影响如图6所示。
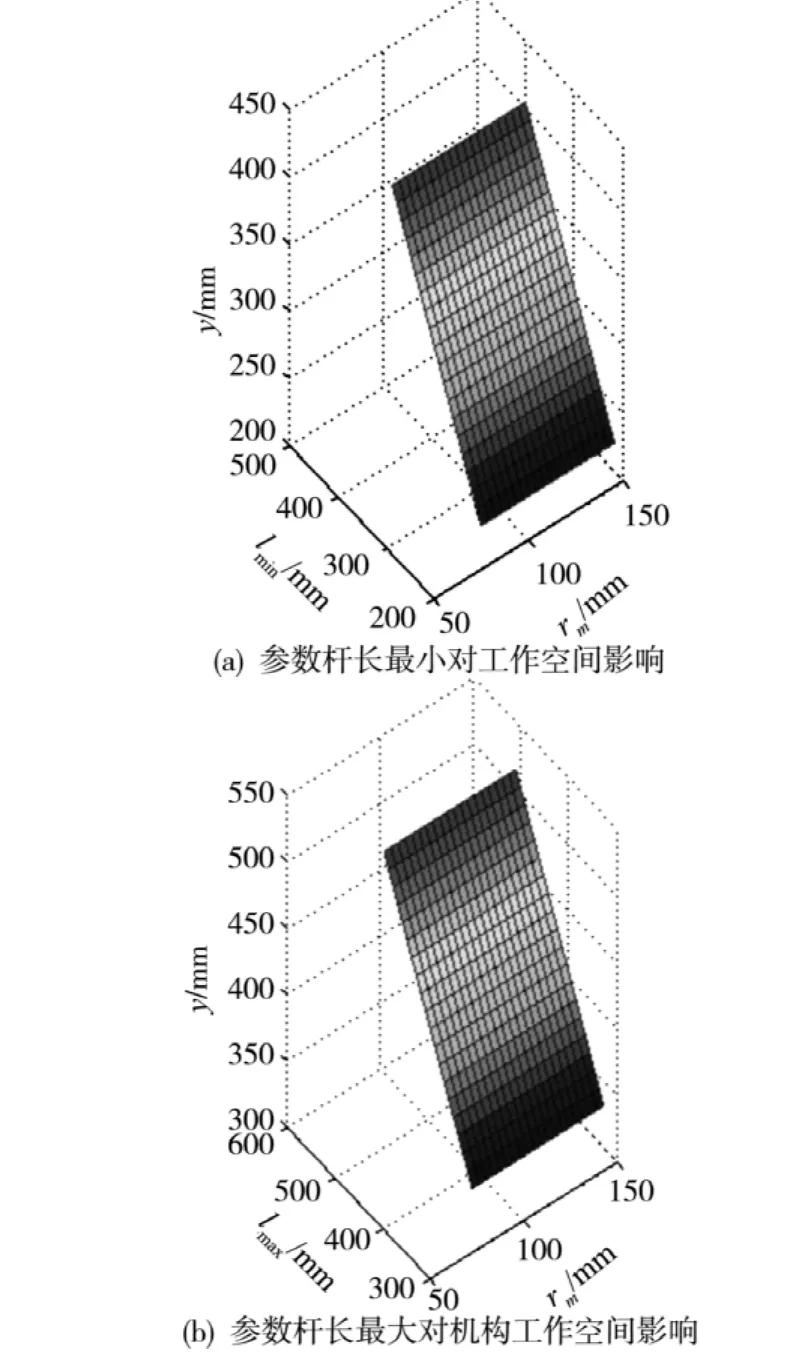
图3 机构参数对机构工作空间影响
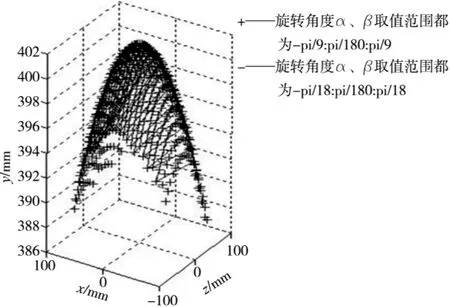
图4 旋转角度对工作空间的影响
在动平台rb、rm一定情况下,连杆长度l越长,3-UPS并联机器人工作空间越灵活。
当驱动连杆长度伸长量Δl为最短时,动平台半径rm与rb之间比值越大,那么得到的3-UPS并联机构的工作空间越灵活。当动平台半径rm与rb之间比值一定时,驱动连杆伸长量Δl越长,得到的3-UPS并联机构的工作空间越灵活。
在伸长量Δl取一定值时,旋转角度α、β取值范围越大,机构工作空间就越灵活。
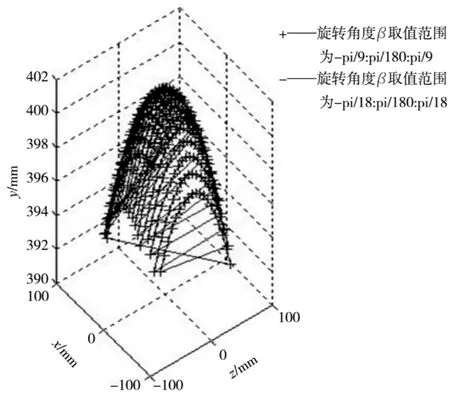
图5 参数β对机构工作空间的影响
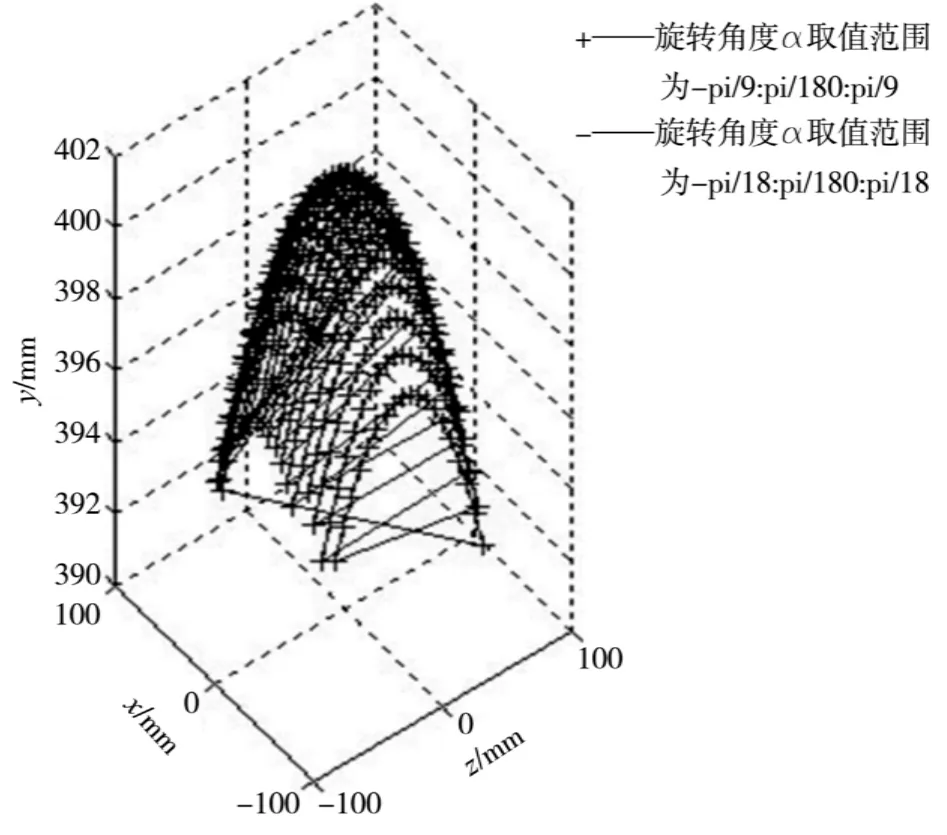
图6 参数α对机构工作空间的影响
当伸长量Δl和旋转角度α取一定值时,旋转角度β取值范围越大,机构工作空间越灵活。当伸长量Δl和旋转角度β取一定值时,旋转角度α取值范围越大,机构工作空间越灵活。
基于上述工作灵活空间的分析,得到3-UPS并联机构的几何参数和运动参数对其运动特性及规律的影响程度,明确该机构的3个自由度的运动空间与机构参数的联系,在保证拱泥机器人能够实现周期性蠕动(转向与直行)动作的前提下,即可以实现绕x和z轴旋转不超过10°的同时沿y轴平移指定距离,寻求机构参数的最优解,满足设计要求。
4 结论
(1)基于3-UPS并联机构运动学研究,解决了3-UPS并联机构的运动反问题。
(2)采用三维搜索法针对3-UPS并联机器人工作空间进行分析,并利用Matlab编程计算出3-UPS并联机构的灵活工作空间,并得出旋转角度α、β以及驱动杆伸长量Δl对工作空间的影响。
(3)动平台半径rm与rb之间比值越大,驱动连杆伸长量Δl越大,得到的3-UPS并联机构的工作空间越灵活。当伸长量Δl取一定值时,旋转角度α、β取值范围越大,机构工作空间就越灵活。当伸长量Δl和旋转角度α或β取一定值时,旋转角度β或α取值范围越大,机构工作空间越灵活。
[1]刘善增,朱真才,王洪欣,等.柔性并联机器人的研究进展[J].组合机床与自动化加工技术,2010,38(5):27 -29.
[2]周兵,毛泰祥,杨汝清.3自由度RPS并联机构的工作空间分析[J].湖南大学学报(自然科学版),2003,30(1):58-61.
[3]高峰,黄玉美,史文浩,等.3-RPS并联机构工作空间分析的球坐标搜索法[J].西安理工大学学报,2001,17(3):239-242.
[4]肖红军.3-RPR平面并联机器人工作空间研究[J].电子科技,2010,23(10):114 -118.
[5]You-go Luo Ph.D.Candidate,Xiang-zkou Zheng,Hongzan Bin.Workspace of translation 3-UPU parallelmanipulators[J].Journal of ShanghaiUniversity,2004(1):62 -67.
[6]Ming Z.Huang,Jean-Luc Thebert.A study of workspace and singularity characteristics for design of 3-DOF planar parallel robots[J].The International Journal of Advanced Manufacturing Technology,2010(5):789-797.
[7]颜兵兵,解明强,孙红旗.蠕动转向关节动力学建模与分析[J].科技导报,2011,29(03):44-47.
(编辑 赵蓉)
Study on Workspace of 3-UPS Parallel Robot
YAN Bing-bing1,LIU Xiu-min2,XIE Ming-qiang1,YIN Bao-lin1
(1.Jiamusi University,Jiamusi154007,China;2.Harbin Dongan Auto-engine Co.,Ltd,Harbin 150066,China)
Based on 3-UPS parallel robot,the lim its of the length of branched chain link between base platform and moving platform to the workspace of 3-UPS parallel robot is analyzed.The workspace boundary is determ ined by using boundary search method.The flexible workspace of 3-UPS parallel robot is then plotted through programm ing in Matlab,and then the relationship between mechanism model parameters and workspace of parallel robot is discussed.Theseworks lay the foundation for structure design of parallel robot and further studying.
3-UPS;parallel robot;workspace
TH16;TG65
A
1001-2265(2012)06-0038-04
2011-12-21;
2012-01-16
教育部科学技术研究重点项目(212042);黑龙江省高校新世纪优秀人才项目(1252-NCET-021);黑龙江省教育厅科学技术计划项目(11541355)
颜兵兵(1976—),男,黑龙江佳木斯人,佳木斯大学机械工程学院工学博士,副教授,研究方向为复杂产品系统建模与仿真,(E-mail)yanbingbing@126.com。
