尺度因子自适应的UKF算法在目标跟踪中的应用
2012-02-03侯建华笪邦友马晓路
侯建华,刘 倩,笪邦友,马晓路
(中南民族大学电子信息工程学院,武汉430074)
在目标跟踪领域,当系统的状态方程和观测方程是线性时,普通的卡尔曼滤波可以达到较好的跟踪效果[1].而在实际应用中,现实背景复杂多变,导致系统方程或观测方程往往是非线性的,因此若采用线性的卡尔曼滤波跟踪,就会变得不稳定甚至发散,导致跟踪失败.传统的解决非线性估计问题的方法是采用扩展卡尔曼滤波器,1995年,Baumberg等提出了基于扩展卡尔曼滤波(EKF)的跟踪方法[2].该算法是对非线性的系统方程或观测方程进行泰勒展开,取其一阶近似项,这种把非线性问题线性化的处理会不可避免地引入线性化误差,此外,系统方程或观测方程的Jacobian矩阵计算非常复杂、耗时,影响整个算法的实时性.为了解决此问题,Julier等提出了用Unscented卡尔曼滤波器来解决非线性滤波的问题[3].Unscented卡尔曼滤波的核心部分是Unscented变换,它采用一组精心选择的加权采样点(Sigma)来表达系统的统计特性,这些采样根据真正的非线性方程进化而无需将其线性化.研究表明,UKF 算法与 EKF 算法[4,5]相比,能够为卡尔曼滤波器提供更好的非线性均值和方差近似解,对系统状态的估计精度和稳定性都有不同程度的提高.
本文在传统UKF对称采样策略的基础上,引入了比例修正框架[6]以保证协方差的半正定性,减少非局部效应的发生.此外,UKF采样过程中,传统的设定尺度因子的方法是根据实时的环境人工的调整尺度因子α,以得到最优经验值.为了提高UKF跟踪算法的实际应用性和智能性,有必要研究一种更优的自适应的尺度因子调整方法.因此,本文将一种尺度因子自适应的UKF算法应用于不同场景的目标跟踪中,实验证明该算法具有很好的跟踪性能和实用性.
1 Unscented变换
Unscented变换是计算非线性变换的随机变量的统计特征的一种新方法,它使用一组适当选择的带权重的离散采样点(Sigma点)来表征系统状态概率密度的均值和方差.U具体实现步骤是:把被估计的状态视为一个随机变量,在原先状态分布中按照某种采样策略[7]采样一些点,使这些点的均值和协方差与原状态分布中的均值和协方差相同,然后将非线性变换作用于每一个采样,得到相应的函数值点集,再求取这些点集的均值和方差,最后通过观测值调节样本点的位置,使采样点集的均值和方差以二阶精度逼近原状态的均值和方差.
假设n是随机变量x的维数,x的均值为¯x,协方差为Px,y=f(x)是一个非线性函数,通过Unscented变换估计随机变量y的均值和协方差的过程如下[8,9].

(1)根据以下方程确定一组随机采样点Xi和采样点所对应的均值权值W(tm)和方差权值W(ic):其中κ是自由参数,用来捕捉给定分布的高阶矩信息,一般对于高斯分布,考虑到4阶矩的统计量,通常取n+κ=3.α是尺度因子,控制采样点和均值¯x之间的距离.β是用于考虑分布的先验知识[10],通常取是矩阵平方根的第i列.
(2)根据非线性变换Yi=f(Xi)计算随机变量Yi的采样.

(3)计算随机变量Yi的均值和协方差:这里列出的Unscented变换是采用对称采样策略,文献[6]证明y均值的计算精度可以精确到三阶,对于协方差的精度可以精确到二阶.在利用公式(5)求权值时加入了比例修正(1-α2+β),确保输出y的协方差的半正定性[11].在目标跟踪算法中,就是用这些离散采样点来表征目标状态的.
2 尺度因子α的自适应方法
文献[3]证明可以通过调整尺度因子α的值来控制采样点到中心点的距离di,在对称采样方式下的该距离越远相应的采样点的参考价值就越小,即会产生非局部效应.在仿真实验时可以通过对α取不同的值,从中选择最优的值以达到最好的跟踪效果.但在实时环境中,不允许尝试,必须给出一个具体的尺度因子的取值方案.所以,参考文献[12],本文将尺度因子α随环境自适应变化的算法应用于UKF的目标跟踪.
假设t时刻的UKF滤波值为x^t/t,真实值为xt/t,而由公式(9)可知,Pt/t表征了预测值与真实值的关系(也就是误差),可以近似的计算出x^t/t与xt/t之间的距离dt/t,为了方便计算,利用公式(10)近似计算dt/t:

这种方法的基本思路就是用第k步的滤波值近似覆盖真值的邻域O(^xt/t,dt/t),此作为第t+1样范围,使Sigma点(采样点)到中心点的距离di不超过dt/t,即令:

利用公式(11)求出的 αt+1/t,重新采样生成Sigma点和相应的权值,完成相应的更新.这样循环的更新的 α值,就可以得到尺度因子自适应的Unscented变换.
3 UKF对跟踪系统的建模
UKF是在普通卡尔曼滤波的框架上,将Unscented变换分别应用于均值和协方差的求解,并不断递推,就可得到UKF非线性滤波器.
考虑一般的目标跟踪问题,目标的状态方程和观测方程分别为:

其中A为表征运动模型的参数,xt表示t时刻系统的状态向量,zt为时刻的观测向量,vt为系统噪声,ωt为观测噪声.
本文UKF滤波过程的实现步骤如下:
1)初始化,根据初始状态变量x得到均值^x和协方差P0.
2)计算2n+1个加权Sigma点xi(t-1/t-1)来表征系统的状态分布(其中i=0,1,…,2n,是状态向量的维数):

得到采样点集xi(t-1/t-1);根据公式(9)~(11)更新α;最后将更新的αt+1/t代入公式(4)~(7)计算相应的权值W(m)i,W(c)i.
3)预测.由系统状态方程和观测方程对各个采样的Sigma点集里的每个采样点进行非线性变换,得到变换后的Sigma点集:

计算预测的状态均值和协方差:

4)观测更新.计算观测均值、自相关函数和观测的互相关函数:

计算状态更新的滤波增益:

状态更新后的滤波值:

状态后验概率方差阵:

若继续跟踪t=t+1,转(2);否则结束.
4 仿真方案
为了验证尺度因子自适应的UKF跟踪算法的效果,分别对传统的UKF算法和自适应的UKF算法进行了仿真,并对新算法的实用性进行了测试.
4.1 算法的自适应性验证
4.1.1 仿真条件
在二维直角坐标系中,假设目标做匀速运动,取目标的位置和速度为系统的状态变量,即→x=[x,y,vx,vy],x和y表示目标中心点的坐标,vx,vy分别表示x,y的导数,即速度.观测向量zt的两个分量分别表示t时刻目标中心处的斜距和方位角,xct和yct分别表示t时刻目标中心处的观测值.vt是从传感器得到的噪声,ωt是从观测样本得到的噪声(仿真时加入随机噪声以模拟复杂环境).具体仿真条件如下:
初始状态向量→x0=[15000,30,15000,30],Δt=10是采样间隔.
4.1.2 仿真结果与分析
首先对标准的UKF算法进行仿真,分别取α为0.1,0.3,0.5,0.8,1(其中 α=1 是为最优经验值).其次,对本文提出的尺度因子α自适应的UKF算法进行仿真.
实验结果如表1.表1中真值与UKF滤波值的误差比公式为:

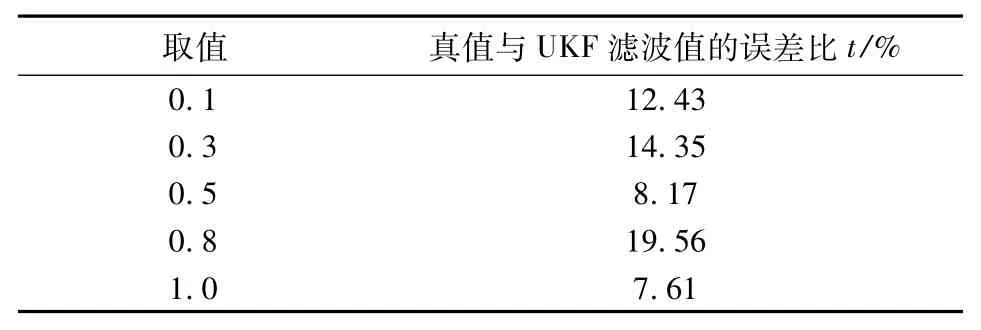
表1 不同α下的跟踪精度Tab.1 Tracking performance with difference α
从表1可以看出,尺度因子α的不同取值时对跟踪精度有很大的影响,滤波精度有明显的差异,因此实际应用时需要人工反复调节α的大小以获得最优值(α=1),使真值和滤波值的差异最小.此操作复杂,智能性和实用性不高.
图1(a)和图1(b)对比可知,尺度因子α自适应的UKF算法能够取得和最优经验值(α=1)时的UKF算法基本相同的跟踪精度.

图1 不同α下的跟踪精度Fig.1 Tracking performance with difference α
4.2 算法的实用性验证
4.2.1 实验条件
为了测试本文算法的实用性和智能性,本文分别对动态背景下的行人行走视频(实验一)和多干扰复杂环境下的车辆行驶视频(实验二)进行试验,并将仿真结果与卡尔曼滤波的跟踪算法进行对比.两组实验的状态向量设置为二维空间的目标的位置、速度,即→x=[x,y,vx,vy],状态初始值由手动选取目标区域完成,考虑到实时视频任意相邻两帧帧差为几十毫秒,目标速度基本不会发生变化,所以设置系统运动模型为匀速即状态转移矩阵:
A=[1,1,0,0;0,1,0,0;0,0,1,1;0,0,0,1]T,观测模型参数为t时刻目标中心处的斜距和方位角,如公式(21),系统噪声和观测噪声均调到最佳.
4.2.1 实验结果与分析
如图2所示,本组实验是在视频第三帧时,人工的选取要跟踪的目标(也就是确定初始状态值),黑色矩形框是目标的跟踪框.视频中的树木和其他行人构成了变化的背景,地面颜色与选定的目标人物上衣颜色相仿,图2(a)~(c)中,由于动态背景和周围杂物的影响,普通的卡尔曼跟踪算法在第30帧时跟踪框已经逐渐偏离目标,在第60帧时已经无法对目标进行跟踪.而图2(d)~(f)(本文算法实验结果)具有明显的优势,在动态背景环境下,本文算法却仍然能够稳定地跟踪目标.
(1)普通卡尔曼滤波进行人体跟踪结果如图2(a)~(c);本文算法进行人体跟踪结果如图2(d)~(f).

图2 卡尔曼滤波和本文算法的比较Fig.2 Comparisons between Kalman filter and improved UKF
(2)普通卡尔曼滤波进行交通车辆跟踪结果如图3(a)~(c);本文算法进行交通车辆跟踪跟踪结果如图3(d)~(f).

图3 卡尔曼滤波和本文算法的比较Fig.3 Comparison between Kalman filter and improved UKF
图3是普通卡尔曼滤波和本文算法用于监测交通车辆的实验结果,初始状态也是通过人工选取,即图3(a)中的第5帧和图3(d)中的第2帧中黑色矩形框选定的卡车.视频中其他来往的车辆构成复杂的非线性背景.实验表明,在复杂的非线性环境下,普通卡尔曼算法不能达到跟踪的目的,如图3(b)所示,在视频第10帧时黑色跟踪框已经偏离目标,基本上失去了跟踪的意义.而本文算法如图3(f)所示,可以一直很稳定的对目标进行跟踪,具有很好的跟踪效果.
综合图2和图3可以看出,不同场景条件下,不用人为的调节尺度因子,本文算法都具有很好的跟踪效果,自适应能力很强,实用性很好.
5 结语
本文提出的尺度因子自适应的UKF跟踪算法能够取得和最优经验值条件下的普通UKF算法大致相同的精度;在不同的实际环境下都能取得理想的跟踪效果,提高了非线性滤波的实时跟踪能力和滤波的数值稳定性,具有非常好的实用价值.
[1]付东莉,柴 毅.基于滚动时域估计的带约束运动目标跟踪[J].计算机应用研究,2011,28(3):1-3.
[2]Baumberg A,Hogg D C.Learning spatiotemporalmodels from training exemples[C]//Proc.British Machine Vision Conference.Birmingham:Proc,1995:45-74.
[3]Simon J.Julier,Jeffrey K.unlmann.A new extension of the kalman filter to nonlinear systems[C]//Proc.The 11th International Symposium on Automatic Control,Aerosense:Proc,2000,21(45):447-482.
[4]Zhu Anfu,Jing Zhanrong.UKF and its application to target tracking[J].Fire Control and Command Control,2008,33(8):2-3.
[5]Mathicu ST-Pierre,Denis Gingars Dr Ing.Comparison between the unscented kalman filter and the extended kalman filter for the position estimation module of an intergrated navigation information system[J].IEEE Intelligent Vehicles Symposium University of Parma,2004,34(7):832-834.
[6]Julier S,Unlmann J,DurrantWhf.A new method for the nonlinear transformation ofmeans and covariance in filters and estimators[J].IEEE Transactions on Automatic Control,2000,45(3):477-482.
[7]刘 铮.UKF算法及其改进算法的研究[D].长沙:中南大学,2009:25-28.
[8]Julier S J,Uhlmann JK.Reduced sigma point filters for the propa-gation of means and covariance through nonlinear transformations[C].//Proc.American Control Conf.Jefferson:Proc,2002:887-892.
[9]Yong Rui,Chen Yunqiang.Better proposal distributions:object tracking using unscented particle filter[J].Computer Vision and Pattern Recognition,2001,10(21):47-51.
[10]MOSHE BEN-ALIVA.Nonliner kalman filtering algorithms for on-line calibration of dynamic traffic assignmentsmodels[J].IEEE Transaction on Intelligent Transportation Systems,2007,8(4):664-665.
[11]Julie S J.The scaled unscented transformation[C]//Proc.American Control Conf.Jefferson:Proc,2002:4555-4559.
[12]Jiang Weinan,Zhou Haiyin.Self-adaptive selectingmethod for scaling factor of scaled unscented transformation[J].Chinese Space Science and Technology,2008,6(3):3-5.
