SAW RFID技术在列车定位与跟踪中的应用
2012-01-27杨剑锋
朱 琎,杨剑锋,周 宇
(兰州交通大学自动化与电气工程学院,兰州 730070)
列车定位与跟踪是列车运行控制系统的一项关键技术,在铁路信号控制系统中扮演着越来越重要的角色。准确、及时、可靠地获得列车的位置信息,是铁路安全、高效运营的保障,也是发挥运能、提高效率的前提。从保证安全的角度出发,列车运行控制系统需要了解当前列车位置,以判断其距前方列车尾部的距离,或是距列车运行前方信号机的距离,从而控制列车加速、减速或者停车,防止列车碰撞、挤岔以及追尾等事故的发生。从提高运输效率出发,列车运行控制系统根据列车位置以及运营约束条件和速度约束条件等,通过优化列车间距,从而在保证安全的条件下提高行车密度和铁路运输效率[1]。
1 现有的列车定位技术
目前,在列车运行控制系统中,列车定位大多是采用轮轴测速传感器、轨道电路、查询应答器以及GPS定位等技术来实现的[1]。下面针对这几种主要的列车定位方法来进行分析。
1.1 轮轴测速传感器法
由于车轮的转动直接反应列车的运动,因此利用车轮的转动信息可以获得列车的实时运行速度,进而通过对其进行积分运算便可得到列车的走行距离。该方法是:将脉冲转速传感器安装在列车轮轴上,轮轴每转动1周,传感器就输出一定数目的脉冲,这样的脉冲频率与轮轴的转速成正比关系,输出脉冲经过滤波、隔离和整形以后,直接输入微处理器进行频率测量并将其转换成列车运行速度和走行距离。近年来,由于大规模集成电路的发展和普及,高精度脉冲转速传感器、微处理器等新技术相继投入使用,使得轮轴测速传感器法在测量精度和可靠性等方面都有了很大提高。
然而,在列车的走行过程中,由于线路条件、加速或制动等因素的影响,机车轮对发生空转或滑行,这将直接影响列车实际运行速度的测量精度。因此,如何克服空转或滑行等因素造成的测量精度下降,是这种方法需要解决的关键问题。
1.2 轨道电路
基于轨道电路的列车定位方法是通过将钢轨分割成不同的区段,在每个区段的始端和终端加上发送/接收器,从而构成一个信息传输回路。当区段空闲时,信息由发送器通过回路传输到接收器,接收继电器励磁吸起;当列车进入区段,此区段占用时,轮对将两根钢轨短路,信息不能送至接收器,接收继电器失磁落下,从而达到列车检测及定位的目的。
轨道电路不仅可以完成列车的占用检测和定位,还可以实现钢轨的断轨检测,是一种高安全、高可靠的列车占用检测及定位方法。但轨道电路的工作状态严重依赖于道床状态,在道砟电阻很低的地方(如隧道内),轨道电路无法正常工作。
1.3 查询-应答器
查询-应答器铺设在轨道中央,当列车经过时可以以无线的方式向列车提供当前位置、前方路况等信息。它可以用作连续式列车运行控制系统的列车精确定位设备,可以作为列车检测或定位辅助设备。显然,采用这种方法想要得到精确地列车定位就必须在轨道上设置大量的应答器。目前,单个应答器的价格仍相对较高,大量的应答器不仅使得铁路建设的成本增加,还同时带来了维修的难题。
1.4 GPS定位系统
全球定位系统GPS是基于GNSS的全球卫星导航系统的应用。GNSS定位的显著特点是大范围、高精度和低成本[1,2]。利用GPS卫星信号的高精度载波相位观测进行定位,在数千千米距离上,其精度可达几个ppm,而且误差不随时间而积累。但由于GPS容易受到地形的影响,造成卫星的信号无法很好地接收到,使得当列车进入隧道环境或遮蔽环境后,无法完成可靠的定位与跟踪。
目前,我国的CTCS系统主要使用查询-应答器、里程计(轮轴测速传感法)以及轨道电路相结合的方法进行列车定位,这种方法较任何单一技术手段的列车定位在精度和可靠性方面都有了很大提高。但由于应答器组之间的铺设距离较远,且列车在运行过程中存在空转/滑行等情况,如何在隧道等轨道电路不宜使用的地区实现连续、高精度、高可靠的列车定位一直是铁路研究人员研究的热点问题。
本文提出了一种基于SAW RFID的列车定位与跟踪系统,通过在轨道中央相对密集地铺设廉价的SAW标签来代替查询-应答器,弥补在隧道或遮蔽环境下其他列车定位方法的不足,实现列车在隧道或遮蔽环境下实时、接近连续式的列车定位与跟踪,为列车运行控制系统提供可靠的数据支持。
2 RFID与SAW RFID
RFID(射频识别)是近年来随着无线电技术和大规模集成电路的普及应用而出现的一项先进的自动识别和数据采集技术,在生产制造、销售流通、公共安全等领域有着广阔的应用前景。但是其作用距离一般只在1 m以内,这极大地限制了RFID技术优势的充分发挥。SAW(声表面波)技术是一种新兴的识别技术,它具有标签无源、抗干扰能力强、体积小等优点,它的有效识别距离可达数米,并且可以识别高速运动的物体[3-5]。因此,应用SAW技术的运动目标识别和定位系统将会有极好的前景。
2.1 RFID系统的组成
通常情况下,RFID系统是由阅读器、电子标签和数据管理系统构成。阅读器和标签都有各自的集成天线。两者之间通信过程涉及到数据和能量传输,通信协议和时序的设定,图1为RFID 系统的组成[5]。
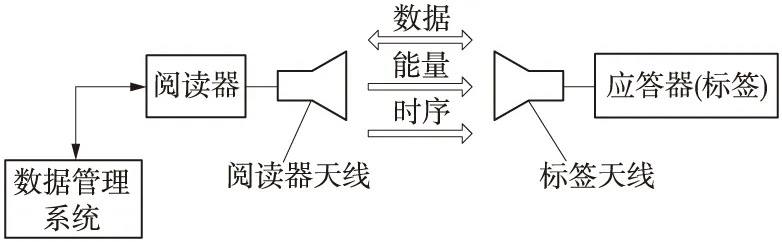
图1 RFID系统的组成
2.2 RFID的工作原理
声表面波(SAW)是传播于晶体表面的一种机械波,其声速仅为电磁波速的十万分之一,传播衰耗很小。声表面波器件的功能部分,是采用现代微电子技术在表面抛光的压电材料基片上制作的叉指换能器(IDT)、反射体和耦合栅等金属电极结构,基于(逆)压电效应,射频信号在经历电磁波—声表面波—电磁波的换能过程中得到处理,达到预定功能要求。
SAW RFID 系统由阅读器和应答器(SAW 标签)组成。应答器由压电基片、叉指换能器(IDT)、声表面波反射器以及连接在叉指换能器上的天线组成,如图2所示,换能器的2条总线与电子标签的天线相连接。阅读器的天线周期地发送高频查询脉冲,在电子标签天线的接收范围内,被接收到的高频脉冲通过叉指换能器转变为声表面波,当 SAW 遇到机械或电不连续的表面时,SAW的一部分就会被反射回去。压电基片和金属化表面之间的过渡就是具有这样的不连续性,因此安装在压电基片上的一组金属反射器就构成了声表面波反射器。由于反射器阵列的排列方式是与一组编码严格对应的,因此,反射器阵列产生的SAW 回波信号包含有标签的编码信息。叉指换能器接收到这些声表面波回波信号,通过压电效应将其转换为电信号并通过天线以射频脉冲串的方式发射出去,阅读器天线接收到回波信号,经过解调、解码等信号处理达到识别的目的[6-8]。
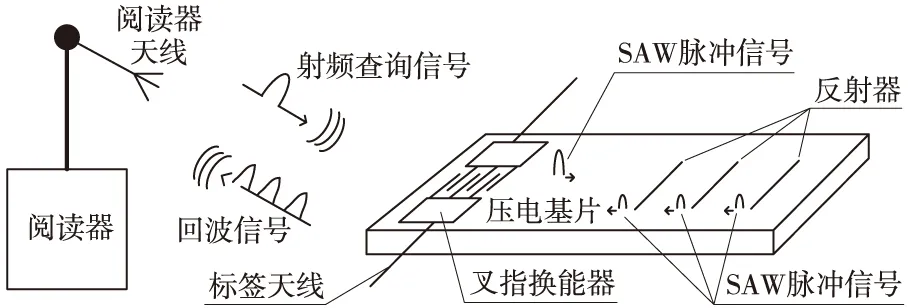
图2 SAW的物理结构
由于声表面波传播速度低,有效的反射脉冲串在经过几微秒的延迟时间后才回到阅读器,在此延迟期间,来自阅读其周围的干扰反射已衰减,因此不会对声表面波电子标签的有效信号产生干扰。
比较我国铁路目前使用的查询-应答器,SAW RFID技术具有以下优点[2,9-11]:
(1)标签芯片与车载天线匹配简单,制作工艺成本更低;
(2)不仅能识别静止物体,而且能识别速度达360 km/h的高速运动物体;
(3)标签具有确定的使用期限,且使用期限内不需维修,可有效降低铁路的维护成本;
(4)数据量大,根据需要可传输除识别信息外的目标的身份信息、运行状态等;
(5)保密性高,未经允许几乎不能复制与修改任何数据,符合列车运行控制系统高安全性的要求;
(6)具有很强的环境适应性,抗干扰能力强,可在全天候下使用,几乎不受污染与潮湿的影响。
因此,使用SAW RFID技术代替查询-应答器,不仅可以解决列车在隧道环境或遮蔽环境下的列车定位,与GPS全球定位技术相结合实现在部分环境比较恶劣的线路(如青藏线)上无“盲区”的列车定位与跟踪[10],而且还可有效降低铁路建设和维护成本。
3 基于SAW RFID的列车定位与跟踪系统
在CTCS-2/3级列车运行控制系统的系统结构以及查询-应答器在列车定位与跟踪中的应用,本文提出了基于SAW RFID的列车定位与跟踪系统结构[11-12],如图3所示。系统的工作原理如下。

图3 系统工作原理
将无源SAW标签以一定的间距(如200 m)固定于轨道中央,标签读写器及相应的通信设备安装在列车上,并与车载安全计算机相连接,读写器天线则安装在机车底部,用来读取标签内精确的位置信息等数据,从而实现列车定位。
车载读写器周期性地通过发射天线发送特定频率的射频信号,当某个SAW标签进入有效工作区域时产生感应电流,从而获得能量被激活。SAW标签则将自身以编码的信息(如SAW标签所处位置参数、位置参数的精度、下一区段的线路条件、前行列车通过该标签时的时间、速度等)通过内置射频天线发射出去。
车载读写器的接收天线接收到来自SAW标签的调制信号,经解调、解码等处理后送入车载安全计算机。车载安全计算机综合来自RFID读写器、测速测距单元、线路数据库等的信息,实时地计算出列车速度、当前位置等数据,并通过无线通信的方式发给地面控制中心。
在车载读写器读取标签数据的同时,车载安全计算机发送命令通过读写器向SAW标签以无线的方式写入本次列车的车次号、运行速度和当前时间等信息,后续列车可读取这些信息作为行车参考[12]。当列车的外部通讯发生中断时,司机也可根据这些信息做出相应的调整,避免追尾等交通事故的发生。
4 车-地数据传输及误码率仿真分析
在列车高速运行时,车载设备与SAW标签之间的通信时间是很短暂的。列车通过一次的运行速度与车上接收报文的次数可用如下经验公式描述[13]
式中,M为接收报文的次数;a为接收放大器的灵敏度;b为传输速度;n为每帧码的位数;l为有效场强作用距离;t为系统的响应时间(ms);v为列车的运行速度。一般在v=350 km/h时,要保证传输长报文时M>3以上才有利于车载设备可靠译码和正确接收报文[13-14]。
通用超高频RFID读写器与SAW标签之间的数据传输率为40k~160k bit/s(取60k bit/s),读写器的读取范围为4~7 m(取5 m)[7],由此可以计算得到列车速度和车地通信时间的对照关系,如表1所示。

表1 列车速度与车地通信时间对照
由表1可知,当列车速度在300 km/h以内,通过标签1次时车上可接收报文的次数都大于3,满足车载设备可靠译码和正确接收报文的条件。
由于SAW标签与车载读写器之间的数据传输经过空间传输信道,因此空间信道面临的干扰问题同样会出现在车载读写器与SAW标签之间的数据传输过程中。干扰带来的直接影响是车载读写器和SAW标签通信过程中的数据错误,即误码。在列车的运行过程中,接收到的来自地面SAW标签的数据直接关系到列车运行安全,因此,在车载读写器与SAW标签的通信过程中应保证尽可能小的误码率[9,14]。由于条件所限,无法完成现场试验。本文利用MATLAB软件和蒙特卡洛法进行信号模拟,分析列车在高速运行条件下车载读写器接收SAW标签信号的误码率。如图4所示。
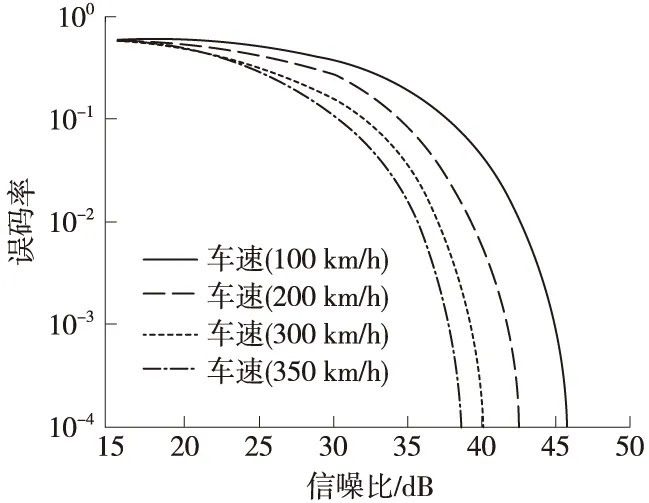
图4 不同车速下信噪比与误码率的关系
由图4可以看出,列车运行速度越高,误码率也就越大,且误码率的下降速度也越慢。当列车速度为100 km/h且信噪比为38 dB时,车载读写器接收的SAW标签信号基本无误码;当列车速度为350 km/h时且信噪比为46 dB时,车载读写器接收的SAW标签信号也基本无误码,满足列车高速运行情况下车地通信对误码率的要求[14]。
在实际应用时,为了满足更高速列车的应用需求,同时考虑到系统的响应时间等因素的影响,可以使用具有更高数据传输效率、更远读取范围的芯片。同样,在有信号干扰的条件下,为了尽可能地降低误码率,车载读写器不仅需要具备较高的热噪声性能,而且需要提高其接收天线的选频特性。
5 结语
列车定位与跟踪在列车运行控制系统中起着非常重要的作用,列车定位方法的精度和可靠性是确定列车安全防护距离的重要因素。基于SAW RFID技术的列车定位与跟踪具有建设和维修成本低、抗干扰能力强等特点,具备防滑校正能力,结合轮轴测速传感器的连续式速度测量,能够做到对高速运行列车的定位和跟踪,可以实时、精确地确定列车在线路上的位置,并通过无线通信系统传输给地面控制中心,为铁路调度指挥提供数据支持,对安全前提下的高效率铁路运输具有重大意义。
[1] 闫剑平,步兵.高速铁路列车定位技术的研究[J].北方交通大学学报,1999,23(5):73-76.
[2] 张雅静,王剑,蔡伯根. 基于GNSS的虚拟应答器研究[J]. 铁道学报,2008,30(1):104-108.
[3] Pohl A. Review of Wireless SAW Sensors[J]. IEEE Trans. On Ultrsonics,Ferroelectrics and Frequency Control, 2000,47(2):317-332.
[4] 王志华,史天运.射频识别技术(RFID)在交通领域的应用现状[J].交通运输系统工程与信息,2005,12(6):96-99.
[5] Sarma S, Brock D, Engels D. Radio frequency identification and the electronic Product code[J]. IEEE Miero, 2001,21(6):50-54.
[6] Reindl L. Wireless passive SAW identification marks and sensors[C]∥2ndInt Symp Acoustic Wave Devices for Future Mobile Communication Systems, 2004.
[7] 康东,石喜勤,李永鹏,等.射频识别(RFID)核心技术与典型应用开发案例[M].北京:人民邮电出版社,2008.
[8] 邓晔,李庆亮,韩韬,等.声表面波无线标签系统接收机的设计[J].传感技术学报,2006,6(3):839-842.
[9] 杨志杰,赵海东,等.高速铁路双向点式信息交互设备的研究[J].中国铁道科学,2006,3(6):91-96.
[10] Jinseok Lee, Kyoung Su Park. Object Tracking Based on RFID Coverage Visual Compensation in Wireless Sensor Network[C]∥IEEE Conference on Computing and Communications. USA: IEEE, 2007,7(1):1597-1600.
[11] Xiong Tingwen, Tan Xi, Yan Na, et al. Modeling and Simulation of RTLS Based on UHF RFID[J]. Journal of System Simulation, 2011,23(1):212-216.
[12] 易志刚,杨林.基于RFID的列车跟踪与定位系统研究[J].铁路计算机应用,2008,17(4):9-12.
[13] 铁道部科学技术司.应答器技术条件(暂行)[S].北京:铁道部科学技术司,2004.
[14] 徐宁,张季良,王财进,等.列车高速运行条件下应答器车载测试设备关键技术[J].中国铁道科学,2010,4(7):131-136.