惯性陀螺方法与基于标志点虚拟陀螺方法在网球发球中上臂转速测量上的应用
2012-01-03盛治进朱满芬
盛治进,朱满芬
惯性陀螺方法与基于标志点虚拟陀螺方法在网球发球中上臂转速测量上的应用
盛治进1,朱满芬2
目的:将惯性陀螺方法和基于标志点虚拟陀螺(a Marker-Based Virtual Gyroscope简称MBVG)方法用于网球发球时上臂内转动动作的监测,并对监测结果同视频拍摄方法研究结果进行比较。方法:惯性陀螺方法利用上臂和胸部两个陀螺对网球发球中上臂的转动进行捕捉。MBVG方法根据Vicon光学动作捕捉系统来设置标志点,利用标志点轨迹建立一种基于向量的方法,并利用几何方法确定转动关系。结果:(1)惯性陀螺方法与视频拍摄方法的结果在规范化时间的0.2~1区间段一致性很好,表明此方法在测量上臂内转动上是有效的;(2)MBVG方法能够用于陀螺超量程的情况,其数据能够反映真实的发球动作;(3)3种方法测得的网球发球数据在特征上彼此能够很好的吻合。结论:惯性陀螺方法与基于标志点虚拟陀螺方法能够有效地用于网球发球评估。
网球;发球;惯性传感器;视频拍摄法;陀螺
网球无论在业余还是专业等级上都是非常热门的体育运动,因此对网球赛场上运动员进行定量监测的需求越来越大。Bahamonde认为[1],在所有网球击球动作中,发球最为关键。发球是一个回合的开始,是最基本的进攻武器,一发得分率、二发得分率、ACES、破发机会和破发次数均与发球方的发球质量有密切关系,说明发球是网球比赛中最重要的一项技术[2]。在顶级水平赛事中,高速的发球往往能够主导比赛[3],因此对于运动员来说,掌握发球技术至关重要。由于网球只有在发球时才真正处于静止状态,因此发球是唯一可以由运动员完全控制的动作,同时发球也被认为是最困难的动作,它需要在恰当时间完成一系列非常复杂的动作[1]。Marshall和Elliot认为[4],发球时球拍与球撞击前的上臂内转动对撞击时的线性挥拍速度有高达54%的贡献。
运动员在训练以及比赛中的运动数据可以用于帮助认识比赛中的体能状况以及比赛技巧,因此对于教练以及体育工作者来说,这些数据显得非常重要。然而如何准确测量这些数据却是一件非常具有挑战性的工作。通常采用的方法是主观评价法,即教练或是其他专家通过观看运动员的表现,对其表现进行评价,以此作为一种信息反馈以帮助运动员提高水平[5]。这种方法的问题是,不同的观察者评价不同,因而反馈也不一样,同时一些高速的运动超出了人眼的观察能力。为了克服上述问题,对于许多专业或是精英级运动员的赛场表现,人们改用目标测量系统来进行观察分析[6]。
监测高速运动通常采用的方法有两种:视频分析(video analysis)和数字光学分析(digital optical analysis)。视频分析方法既可以用于实验室研究也可以用在真实比赛环境中,然而数字光学分析的方法局限于实验室研究。两种方法都需要在感兴趣的位置设置标志点,通过观测标志点的位置和运动数据来实时的获取标志点的三维位置信息以及一些生物力学信息,用以分析整体运动[1,4,6,13]。然而这些方法成本很高,同时实验前的准备时间(用于摄像机定位、对准和校准)也很长。在一些情况下,可能还需要进行数据后期处理,如去除错误的数据,或利用插值方法补充由于运动中遮挡导致缺失的数据。
随着微电子和其他微技术的发展,一些价格便宜、微型化、质量小以及体积小的仪器可能用于许多体育运动中监测运动员的表现[7]。相比于光学和视频的方法,这些新兴的方法既克服了前述缺陷又能保证足够精度。基于微机电系统(Micro-Electro-Mechanical Systems简称MEMS)技术的惯性传感器例如陀螺、加速度计就是很好的例子[7-8]。如今,MEMS惯性技术越来越流行。下面列出了MEMS惯性传感器方法的主要优点:(1)体积小、重量轻:传感器能够在不影响性能的情况下固定在身体的任何部位;(2)复杂度低:准备时间短,传感器能够很容易固定在身体上;(3)价格便宜:MEMS惯性传感器比其他技术要便宜得多;(4)实时反馈:实验一结束便能得到实验结果,甚至如果采用无线技术的话,实验结果能实时获取;(5)真实的环境:惯性传感器能用于真实的比赛环境,而不仅仅是在实验室中,因此能提供更多的信息。
因此,利用惯性传感器对一些体育运动进行监测和分析,变得格外具有吸引力且具有必要性,目前已经用于对高速运动项目以及体能水平进行测量和分类[8-12]。然而,每种技术都有自身的缺陷,MEMS惯性传感器技术也不例外,其主要问题是存在测量范围上的限制,随着技术的发展,这个问题会得到缓解,但当前仍需要一种替代方法。
为了克服惯性传感器方法的不足,已经提出了一种混合系统的方法[13],该方法可以从基于标志点的光学系统中提取惯性传感器数据。这种方法还有另外一个好处,那就是它能大幅降低准备时间,因为它不需要采用试错法来确定惯性传感器的最佳位置。2007年,Busch和James发明了一种基于标志点的虚拟一维惯性加速度计方法[13],该方法是利用Vicon动作捕捉系统获得3个标志点的三维运动轨迹,据此计算其虚拟加速度计数据。该研究中,加速度计的位置和方向由这3个标志点的位置计算确定。研究中分别利用简单和复杂的动作对该方法进行检验,结果表明该方法得到的结果与真实加速度计获取的数据能够很好的吻合。这次试验中,虚拟传感器在x、y以及z轴上的均方根(RMS)误差分别为 0.030 6 g、0.038 4 g和 0.08 g,平均绝对误差为3.6%。其中,g表示重力加速度,取9.8 m/s2。
Elliot等人[14]采用视频拍摄的方法对高速的发球动作进行了研究。研究中,他们采用两个同步的高速摄像机以200 Hz的频率对数据进行采集。整个发球过程中,两摄像机分别从运动员的正面和侧面进行拍摄,拍摄范围覆盖运动员的整个活动范围。研究中从20个网球运动员的发球中只挑选了其中最快的3个好球进行后续的分析。首先,采用Peak Motus系统手动对发球动作进行数字化处理,Elliot等人采用了一个包含20个点的模型,这20个点包含中趾、脚踝、膝盖、臀部、肩膀、肘部、手腕、头部、拍柄和拍头等部位的中心。初始帧选在球刚抛起来的时刻,而终止帧则选取在球网撞击球一段时间后。然后,采用直接线性变换方法计算三维坐标数据[15],利用专门的计算机程序计算出所需的运动学参数,例如肩膀外转动、膝盖弯曲等。
本研究将惯性陀螺方法和基于标志点的虚拟陀螺方法(a Marker-Based Virtual Gyroscope简称MBVG)用于网球发球时上臂转动动作的监测,并将监测效果与视频拍摄方法所得结果进行比较。
1 研究方法
1.1 惯性陀螺方法中的数据采集
实验中选用的惯性传感器单元包含一个3轴2 g加速度计(Kionix KXM52-1050)和一个单轴 300 °/s陀螺(ADXRS300),其采样频率100 Hz,尺寸为52 mm×34 mm×12 mm,质量大约为22 g[16]。研究中,在网球运动员身上安置了两个惯性传感器单元,一个放置在上臂上,另一个则固定在胸前(见图1)。图1中同时还标出了传感器的转轴方向,图1a中的转轴方向为从头到脚的竖线,图1b中的转轴方向则沿着上臂。
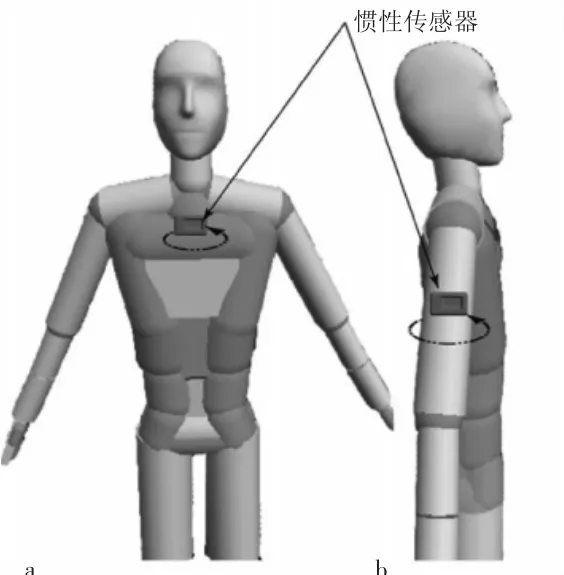
图1 惯性传感器在实验者身上的安置位置和方向示意图
上臂传感器用于检测运动员向前击球时由于上臂抬起弯曲产生的上臂内转动,由于上臂转动传感器数据会受到肩膀扭转运动影响。因此,设置胸部传感器可用于检测肩部扭动,消除肩部扭动对于上臂转动的影响。当上臂以及胸口的陀螺都同步和校准好后,就可以通过将上臂陀螺数据减去胸口陀螺数据获得动作中的内旋分量,试验结果见2.2。
1.2 基于标志点的虚拟陀螺(MBVG)技术应用
本研究中MBVG采用了Plug-in-Gait模型中的标记点布置方法。Plug-in-Gait模型是Vicon光学监控系统中的一种模型,与其他针对专门运动项目设计的模型不一样,该模型是一种在运动研究中广泛采用的标准模型。该模型利用三个独立的标志点构成一个平面,每时间帧在其对应的平面上会建立一个局部坐标系。为得到上臂的旋转角度及角速度,需要建立一系列的坐标系(O,O′,O″,O‴)。
1.2.1 确定MBVG的位置和方向 利用3个标志点建立一个平面,以该平面为基准定义MBVG的位置和方向。图2 a显示了一种可能的定义方案。根据Plug-in-Gait模型的标准标志点布置方法,上臂上的3个标志点分别选取为右肩(RSHO),右肘(RELB)以及右上臂(RUPA),如图2b所示。
实验中选取的标志点不能因皮肤活动或伸展而偏离原来位置,因此在上臂可以采用的标志点仅有右肩、右肘和右上臂。为

图2 a MBVG中网格划分示例b上臂标志点位置以及对应坐标系的示意图Fig.2 a Orientation and Position of a MBVG on a Plane of Three Marker Points and a Sample Mesh b Local Coordinate System as well as the Marker Positions on the Upper Arm Segment
具体计算方法为,用网格上的节点ni0和ni1确定轴的方向,运用式(1)可得到规范化的z^向量。为获得轴的方向,需要将从ni0到ni2的矢量投影到z^轴上,从而获得该矢量在z^向的分量,计算表达式为式(2)。同时也可得到坐标系的原点,也就是MBVG的位置V。最后对y^向量与z^向量进行叉乘便能得到x^向量,如式(3)所示。

1.2.2 旋转轴的对准 确定了虚拟陀螺的位置和方向后,还需要将后面所有帧的某一个坐标轴与参考帧同一轴对齐,这样才能够计算帧间绕该轴的旋转关系。研究中选z轴作为该坐标轴。为了对齐z轴,需要进行许多中间操作[17]:
(1)采用式(4)对齐原点,使得所有帧的局部坐标系(O′t)原点与参考帧坐标系(The Reference Frame)(O)的原点重合,如图3a所示,这也意味着所有帧的转轴经过同一点。式(4)给出了变换关系。

其中,d是两坐标系O与O′t的矢量差。O′t是各帧平移后的坐标系。
(2)采用式(5),坐标系 绕z轴旋转,使得转轴转到xy面内,然后根据式(6),坐标系绕y轴旋转,使转轴与z轴重合,如图3b所示。

图3 坐标系转换示意图a坐标系原点平移示意图bz轴对齐示意Fig.3 Translation and Rotation Required to Align Z-Axis of Frames to the Z-Axis of the Reference Frame a Translation to Align Origins with the Results of Translation b Rotation to Align Z-Axis with the Result of Otation
式(5)和(6)给出了每帧的 轴与参考帧z轴之间的旋转矩阵。本文中,轴的坐标分量记为<abc>(在坐标系z′中的坐标分量为(a,b,c))。z′轴绕 z轴转到 xz面的旋转矩阵[17]为:

利用式(5)和(6),使得每帧局部坐标系的 轴与参考帧坐标系z轴对齐,如图3b所示,变换算式见式(7)。

其中,是z轴对齐后的坐标系。
1.2.3 利用刚体变换方法确定转角 z轴对齐后,即可以采用刚体变换方法[18]确定绕z轴的转角。由图3b可知,利用前述方法只能使得z轴对齐,其他两轴并未对齐。因此,还需要绕z轴旋转一定角度才能保证两坐标系完全重合。该转角可以通过从旋转矩阵确定欧拉角的方法计算得到。而每帧与参考帧之间的旋转矩阵可以通过奇异值分解(SVD)方法获得。图4是绕z轴旋转的示意图。
刚体变换算式为式(8):
信念即是一种稳固的、持久的意识,一种坚定的确信、一种念念不忘的追求,即一种信仰。信仰是精神领域的最高主宰,是人们关于生命和宇宙最高价值的信念,是主体对于某种思想的真诚信服。它是一种附着于一定对象的相信心态。任何人生活在世界上,其思想和行为无时不受一定信仰的支配。对某种理论的自信即是对某种理论的坚定信仰。然而,我们倡导的理论自信是以科学信仰为根本前提的。它不同于一般的信仰。

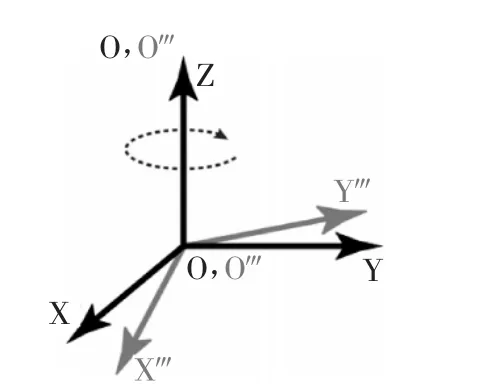
图4 绕z轴旋转示意图Fig.4 Determining of Rotation Around the Z-Axis to Align Axes Enabling Extraction of the Euler Angles
其中,O″是指每帧坐标系旋转平移后并与参考帧坐标系重合的坐标系,O″t是仅有 z轴重合的坐标系,s是标度因子,[RO″→O″]t是旋转矩阵,是各坐标系与参考帧坐标系原点的距离。研究中,标度因子大约为1。这种近似是基于各帧上标志点间的距离保持不变的假设。由于前面已经将坐标系的原点移动到参考帧坐标系原点位置,因此Vt=0。将Vt=0和s=1代入式(8),其可简化为:

因此,可以直接使用式(9)描述给定帧相对于参考帧的方向。一旦确定了旋转矩阵,即可利用SVD方法从旋转矩阵[RO″→O″]t中获取欧拉角[19]。
1.2.4 采用修正平面方法降低标记移动带来的误差 皮肤和关节的活动及伸展会给MBVG带来误差,尤其是网球发球这样的高速运动中,一些平移运动很有可能被误识别为旋转运动,即虚转动,从而导致误差。为解决上述问题,研究中采用修正的方法,即事先确定一些动作例如肩外展动作和肩横向外展动作带来的误差,从而确定相应的修正量。这些动作在不同幅度时的修正量并不相同,因此需要给出一定幅度范围的修正量,该范围应涵盖典型的发球动作。式(10)给出了具体的修正方法。

其中,是修正后的结果,Rotcal是采用前述MBVG方法计算出来的结果,则是由于皮肤和关节带来的转动误差即修正量。
表1给出了在一定的肩外展以及肩横向外展角度范围下的虚转动(修正量)。实验中,依照plug-in-gait模型在实验者身上安装标志点,然后要求实验者伸直手臂,水平转动手臂使得横向外展角大约为45°,随后缓慢抬升手臂以改变外展角,起始外展角大约为10°,当外展角大约达到160°时停止抬升。依照相同的步骤,在横向外展角分别为 90°、135°、165°以及 180°时重复上述实验。
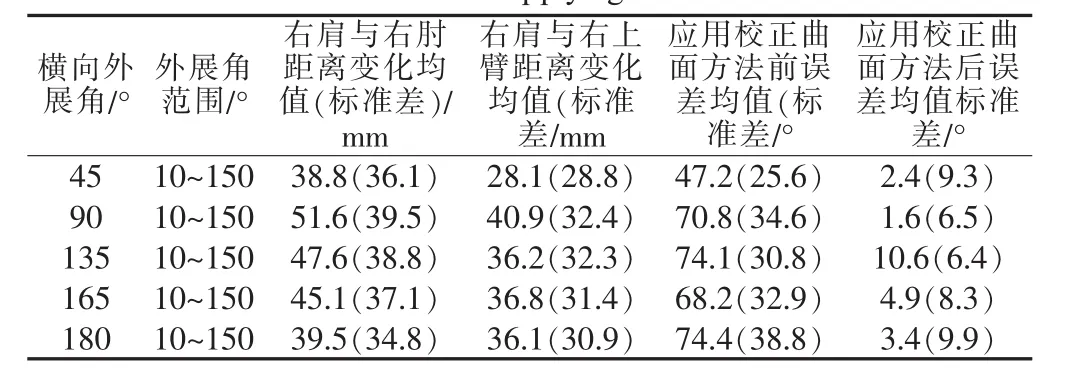
表1 右肩、右肘和右上臂标志点之间距离的变化以及应用校正曲面方法的结果Tab.1 Distance Change Between the RSHO,RELB and RUPA Markers and the Results of Applying the Correction Surface
由于皮肤的伸展以及关节的活动,右肩标志点在肩膀上的位置会发生变化,从而导致右肩与右肘以及右肩与右上臂标志点之间的距离并不恒定。上臂放下或抬起时右肩位置会发生变化,尽管上臂没有内转动,MBVG依然能够检测到转动。表1给出了上臂抬升时右肩与右肘以及右肩与右上臂标志点间距离的变化。数据表明,这两个距离并不是固定的,最大变化量分别能达到均值51.6 mm,标准差39.5 mm以及均值40.9 mm,标准差32.4 mm,该变化量最终会导致转动误差。其中,标准差的值表明在整个动作幅度范围内该距离变化量也有大范围的变动。
根据前面得到的实验数据,可以建立一个误差曲面。通过将MBVG计算结果减去曲面上对应误差值便可降低标志点活动带来的误差。表1给出了应用该误差曲面得到的结果(包括应用前和应用后),由表可见,校正后的数据均接近于0。由于此实验中上臂本就没有转动(这意味着表中最后一列的数据理论值应为0),所以这种方法能够有效降低虚转动。
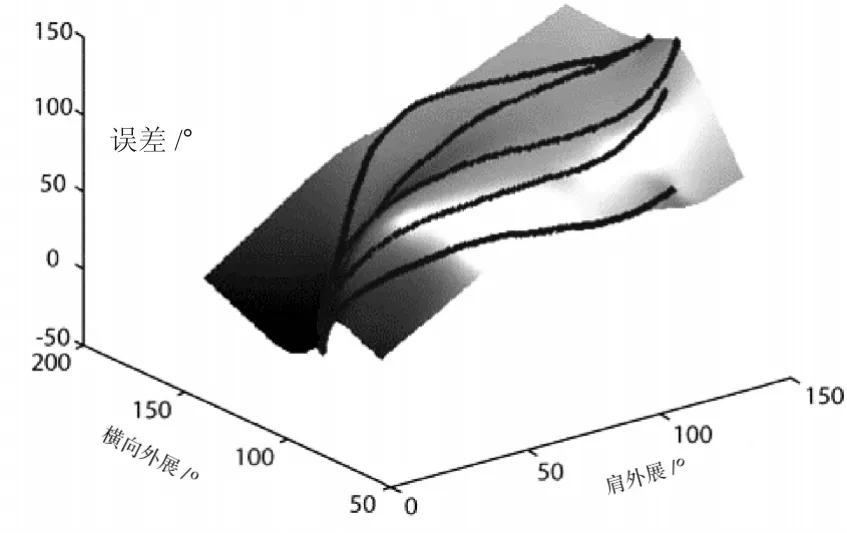
图5 肩外展以及肩横向外展对应的拟合曲面Fig.5 Fitting Surface as a Function of Shoulder Abduction and Horizontal Abduction Angles to Eliminate the Skin Movement Error for Tennis Serves.The Data Trial can be Seen as Solid Curves on the Surface
需要说明的是,误差曲面只有当在误差是由关节或皮肤活动导致的时候才可使用,例如本研究中网球发球运动监测就可采用此方法。
2 实验结果与分析
2.1 惯性陀螺方法和MBVG方法实验结果对比
实验中采用了摆测试的方法验证惯性陀螺方法以及MBVG方法的实际效果。实验仪器包括一个摆装置,一个MEMS陀螺以及几个标志点。如图6a所示,在50 cm长直木板根部固定一个惯性传感器,同时在木板上安置3个标志点,这3个标志点不沿一条直线。采用上文提到的方法可创建一个MBVG,转动轴即为摆轴。

图6 a摆装置示意图b装置自然摆动Fig.6 a Setup for the Pendulum test is Shown.The Position of the Gyroscope Sensor as well as the Markers is Shown.b the Pendulum is Swinging Naturally around a Pivot Point
如图6b所示,木板绕着摆轴可以自由摆动。摆动时,MBVG和陀螺分别会得到一个输出。由于标志点是刚性固定在木板上(因此不可能活动),因此并不需要采用误差曲面的方法进行校正。
对MBVG和陀螺数据进行了比较,发现两者能够很好的吻合(r=0.972 9,P<0.000 1;r为 Pearson相关系数;P 为显著性差异测试结果)(见图7)。

图7 惯性陀螺数据与MBVG数据的比较Fig.7 Comparison Between the Inertial Gyroscope data and the MBVG data(注:转动角速度等于转动角度除以时间)
2.2 3种方法在网球发球测试中实验结果对比
实验中将MBVG方法与惯性陀螺方法应用于网球发球中以测量上臂内转动,并将测量结果与Elliot等人视频拍摄方法研究结果[4]进行了比较。根据Elliot研究结果,上臂内转动速度能够高达2 100°/s,然而当前采用的MEMS陀螺不能捕捉测量如此大的角速度,其最高只能测量300°/s的角速度,因此,实验中选用了慢速的发球动作。除了击球能量小一点外,慢速发球与常速发球在生物机械作用上基本相同。采用Pearson相关性测试方法[20-21],发现两种发球在上臂内转动上有很大的相关性(r=0.8680,P<0.0001)。将3种方法得到的结果在时间基上规范化(大致方法是将整个发球持续时间设为1,时间基按尺度缩放),然后进行比较。
实验中在实验者身上安置了两个陀螺,一个在上臂,另一个在胸部。实验者连续完成了两次发球动作,通过陀螺可分别测得其上臂和肩部的转动角速度。图8给出了测量结果,其中8a为上臂测量数据,8b为胸部测量数据。由图8可知,在发球准备阶段(阶段P),上臂测量数据和胸部测量数据的变化趋势一致;然而在向前推动阶段(阶段F),上臂测量数据增大,而胸部测量数据则减小,将上臂上臂测量数据减去胸部测量数据可消除肩膀扭动对上臂内转动的影响,图8c给出了两者相减的结果。
实验中,同时还采用Plug-in-Gait标志点布置方法在实验者上身布置了反光标记,用以实现MBVG传感器。标志点位置分别为肩膀(RSHO),肘部(RELB)以及上臂(RUPA)。
为对前述3种方法进行比较,实验者总共完成了十次发球,并从中任意挑选了3次进行分析。分别利用MBVG以及惯性陀螺方法对3次发球的数据进行处理,并将三组结果取平均,最终两种方法规范化后的数据如图9,图中还对比划出了Elliot等人视频拍摄法[4]的数据结果。研究中利用移动平均方法对传感器数据进行光滑处理。如图9所示,规范化时间轴上0~0.4区间对应的是发球的准备阶段,此时肩膀水平外展角度大约在170°到190°之间。从图5可看出,其处于误差曲面的边缘区域,由于在实测数据点覆盖区域之外,校正方法误差较大。因此,误差曲面方法不能有效降低误差,从而导致MBVG方法和惯性陀螺方法在此区域数据差别较大。0.6~0.8区间段上的误差主要是由肩关节上标志点活动导致的。需要注意的是,通常采用的动作分析方法(Plug-in-Gait)会带来标志点位置误差,误差曲面并不能够完全消除该误差,因此MBVG与陀螺的数据仍会有一定的差异。总体来说,两种方法得到的测量曲线整体趋势一致,峰值位置也能很好吻合。

图8 a上臂陀螺的角速度测量结果;b胸部陀螺的角速度测量结果;ca与b相减后的结果注:P(preparation phase)准备阶段;F(forwardmotion phase)向前运动阶段Fig.8 a AngularVelocityfrom the UpperArm Gyroscope.b Angular Velocityfrom the ChestGyroscope c AngularVelocityfrom the Upper Arm Minus ChestGyroscope are Shown forTwo Service Actions
除此之外,实验结果还表明MBVG方法与视频拍摄方法在0~0.2 区间的数据一致性非常好(r=0.969 8,P<0.000 1),在 0.2~1区间,这种一致性仍然不错(r=0.9470,P<0.000 1)。然而惯性陀螺方法与视频拍摄方法的结果只有在0.2~1区间一致性很好(r=0.976 2,P<0.000 1)。这种差异可能是由于3种方法中实验者的发球风格和技术水平存在不同。考虑到视频拍摄方法的数据来自于Elliot等人的研究成果,MBVG方法和惯性陀螺方法中的实验者与在视频拍摄方法中的实验者并不相同。因此,3种方法结果不同可以部分归因于实验者的技术水平和风格上的差异。
3 结 论
(1)惯性陀螺方法利用两个陀螺对网球发球中上臂的转动动作进行捕捉。结果表明,这种方法与视频拍摄方法的结果在规范化时间的0.2~1区间段一致性很好,这也证明了惯性陀螺方法在上臂内转动测量上的有效性。
(2)MBVG方法根据Vicon光学动作捕捉系统中的模型设置标志点,利用标志点轨迹建立一种基于向量的方法,并利用几何方法确定转动关系。研究表明,该方法的结果能够反映真实的运动规律。但是由于关节和皮肤活动带来的误差影响了方法的精度,实验中又采用误差曲面的方法对其进行校正。尽管在上臂抬升时还存在一定的误差,但根据Pearson相关系数以及显著性差异测试提供的统计结果,该方法与其他两种方法总体上结果一致。此外,该方法还能够用于确定惯性传感器在实验者身上安置的最佳位置和方向。
(3)MBVG方法能够用于陀螺超量程的情况,其数据能够反映真实的发球动作,MBVG方法还可用于确认陀螺数据的峰值部分,其并不需要给出精确的结果,只需得到大致的变化特征即可。
(4)惯性陀螺方法以及MBVG方法均能够有效地用于网球发球评估。两种方法的捕捉结果与视频拍摄的结果几乎完全一致,即便是在快速发球运动中,当发球速度已经超出了实际陀螺的测量范围时,MBVG方法仍有可能获得发球动作整体的趋势和主要特征。
[1]Bahamonde R.Changes in angular momentum during the tennis serve[J].J Sports Sci,2000,18:579-592.
[2]郭立亚,吕雪松,杨锋.对网球项目男、女单打比赛制胜规律的研究[J].中国体育科技,2009,45(6):55.
[3]Knudson D.Biomechanical principles of tennis technique using science to improve your strokes[M].RacquetTechPublishing,Vista,2006:45-74.
[4]Marshall R N,Elliot B C.Long-axis rotation:the missing link in proximal-to-distal segment sequencing [J].JSportsSci,2000,18:247-254.
[5]Reid M,Crespo M.Biomechanics of advanced tennis[J].International Tennis Federation,Spain,2003:13-30.
[6]Gordon B J,Dapena J.Contributions of the joint rotations to racquet speed in the tennis serve[J].J Sports Sci 2004,24(1):31-49.
[7]James D A.The application of inertial sensors in elite sports monitoring[J].The Engineering of Sport,2006:155-160.
[8]Wixted A,Thiel D,Hahn A,et al.Measurement of energy expenditure in elite athletes using MEMS based inertial sensors[J].IEEE,Sens2007,7(4):481-488.
[9]Ahmadi A,Rowlands D,James D A.Investigating the translational and rotational motion of the swing using accelerometers for athlete skill assessment[J].Proceedings of 5th IEEE Sensors,2006,(22-25):980-983.
[10]ChannellsJ,PurcellB,Barrettr,etal.Determinationofrotationalkinematics of the lower legduringsprint runningusingaccelerometers[J].Proceedings of SPIE,2006:60316-60319.
[11]Davey N P,James D A.Swimming stroke analysis using multiple accelerometer devices and tethered systems [C].3rd Asia Pacific conference on sports technology,Singapore,2007:23-26.
[12]Kavanagh J J,Morrison S,James D A,et al.Reliability of segmental accelerations measured using a newwireless gait analysis system[J].J Biomech 2006,39(72):2 863-2 872.
[13]Busch A,James DA.Extraction of virtual acceleration data from motion capture,Seoul Korea,July 14-18[C].Proceeding of the XXVIth ISBS conference,2008:68-71.
[14]Elliot B,Fleisig G,Nicholls R,et al.Technique effects on upper limb loadingin the tennis serve[J].J Sci Med Sport,2003(6):76-87.
[15]Abdel-aziz Y I,Karara H M.Direct linear transformation from comparator coordinates into object coordinates in close-range photogrammetry[C].Proceedings of ASP symposium onclose range photogrammetry.Am Soc Photogramm,Falla Church,1971:1-19.
[16]Davey N,Wixted A,Ohgi Y James D A.A low cost self contained platform for human motion analysis[C].Third Asia Pacific conference on sportstechnologySingapore,23-26 September,FussFK,Subic A,Ujihashi S(eds)Taylor and Francis,London,2007:101-111.
[17]MurrayG.Rotation about an arbitraryaxis in 3-D dimension.Available via[EB/OL].http://inside.mines.edu/gmurray/ArbitraryAxisRotation/Arbitrary AxisRotation.html.2008-07-15.
[18]Challis J H.A procedure for determining rigid body transformation parameters[J].J Biomech,1995,28(6):733-737.
[19]Slabaugh G G.Computing euler angles from a rotation matrix[EB/OL].http://www.gregslabaugh.name/publications/euler.pdf.Accessed 15 June 2008.
[20]Naito K,Maruyama T.Contributions of the muscular torques and motion-dependent torques to generate rapid elbow extension during overhand baseball pitching[J].Sports Eng ,2008,11(1):47-56.
[21]Ohgi Y.Pattern matching application for the swimming stroke recognition[J].Portuguese J Sports Sci,2006:69-70.
Application of Inertial Gyroscope and Marker-Based Virtual Gyroscope Techniques on Analysis for Upper Arm Rotational Velocity Measurements in Tennis Serve
SHENG Zhijin1,ZHU Manfen2
(1.Dept.of PE,Anhui Medical University,Hefei 230032,China;2.Dept.of Technology,Heifei Heli Institute of Optoelectronics Application,Hefei 230088,China)
Object:This paper applied inertial Gyroscope techniques,and Marker-Based Virtual Gyroscope (MBVG)techniques in monitoring the upper arm rotation in tennis serve,and the monitoring results were compared with video graphic techniques results.Method:An inertial gyroscope system including two gyroscopes,one on the upper arm and one on the chest was used in this study to capture the rotational motion of the upper arm rotation during the tennis serve.The MBVG was derived from the marker positions obtained from the Vicon Optical Motion Capture System.This required a vector-based method to be developed using the marker's trajectories with geometric method applied to determine the rotation angle.Results:(1)It was found that the inertial gyroscope techniques closely matched videography from the normalized time 0.2~1.This indicated that the inertial gyroscope could be a useful method to measure the internal upper arm rotational motion;(2)The use of the MBVG approach here was to verify the feasibility of utilizing this method to determine the overall trends when gyroscopes become saturated;(3)The results indicated that there is a close temporal feature match for all three methods when applied to the tennis serve.Conclusions:The inertial gyroscopes and the MBVG techniques can be advantageous for tennis serve assessment.
tennis;serve;inertial sensors;videography;gyroscope
G 804.6
A
1005-0000(2012)01-0078-06
2011-12-11;
2012-01-06;录用日期:2012-01-07
盛治进(1979-),男,安徽太湖人,讲师,研究方向为网球教学理论与方法、体育社会学。
1.安徽医科大学公共基础学院体育教学部,安徽合肥230032;2.合肥合力光电应用研究所技术部,安徽合肥230088。
