敏捷遥感卫星工作模式研究
2011-12-27张新伟戴君刘付强
张新伟 戴君 刘付强
(北京空间飞行器总体设计部,北京 100094)
1 引言
姿态机动是指将卫星从一种姿态过渡到另一种要求姿态的控制过程[1]。遥感卫星可以利用高速的姿态机动能力,快速改变遥感器的对地指向,实现对地目标的快速灵活的观测,这种高速的姿态机动能力可称之为姿态敏捷控制。姿态敏捷控制可极大地提高卫星使用灵活性和观测效率,快速高效的获取所需的非星下点目标遥感数据,是当今世界商业遥感卫星的一个发展方向。美国伊克诺斯卫星(Ikonos)、快鸟卫星(QuickBird)、地球眼卫星1号(Geo-Eye-1)、世界观测卫星1 号(WorldView-1)和世界观测卫星2号(WorldView-2)等商业遥感卫星具备姿态敏捷能力。另外,法国的昴宿星(Pleiades)卫星和印度的制图卫星2号(Cartosat-2)卫星也具备了这种姿态敏感控制能力[2-6]。上述遥感卫星既可以实现目标的快速成像,亦可实现地形的立体观测;既可以实现观测区域的拼接,亦可实现区域的扫描成像。随着国内航天技术的发展,我国在卫星姿态控制领域已经取得了长足的进步,各种空间姿态控制执行机构已达到一定的水平,具备了发展敏捷型遥感卫星的基本条件。本文在调研国外典型敏捷卫星的基础上,分析和论证了姿态敏捷控制能力,基于敏捷能力设计了遥感卫星工作模式,并提出针对敏捷卫星的设计思路。
2 国外敏捷卫星发展情况综述
最早的敏捷遥感卫星是1999年9月发射的Ikonos-2 卫星,一经推出便得到了广泛的应用和良好的口碑。随后美国数字全球公司(DigitalGlobe)于2001年10月发射了QuickBird-2 卫星,两颗遥感卫星质量均小于1t,属于小型敏捷遥感卫星。随着技术的进步,DigitalGlobe公司又于2007年9月和2009年10月相继发射了两颗商用高分辨率成像卫星WorldView-1和WorldView-2卫星,两颗卫星质量分别达到了2 500kg和2 800kg,卫星地面像元分辨率达到了0.5m,敏捷控制技术开始在大中型遥感卫星上应用。国外几种典型的敏捷卫星性能指标详见表1所示。
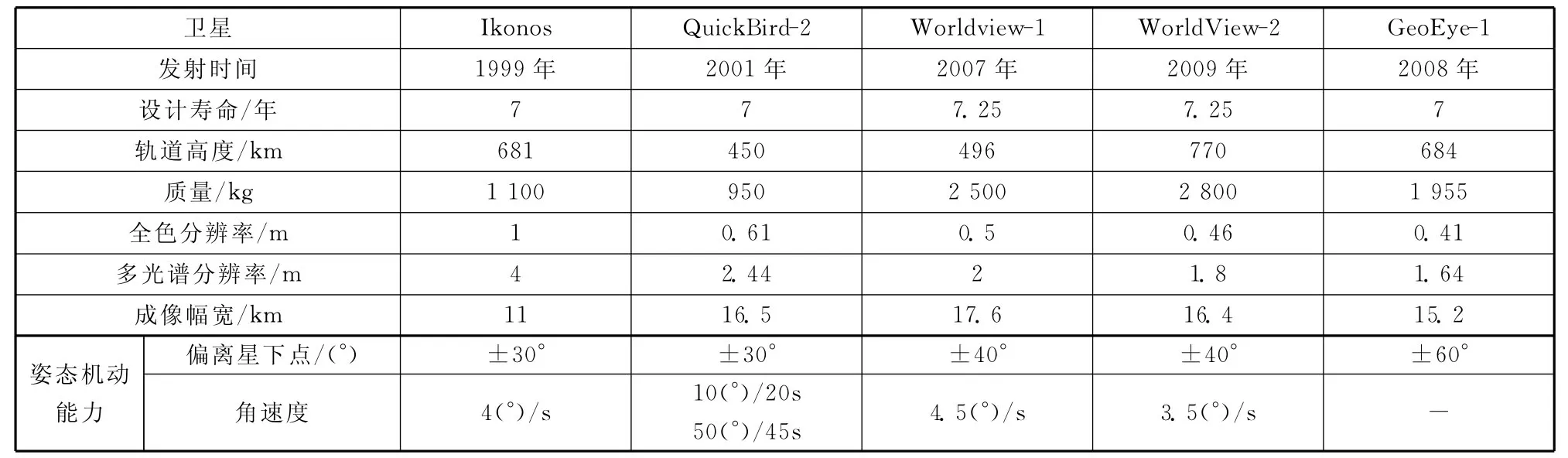
表1 敏捷遥感卫星主要技术参数[2-5]Table1 Chief characteristics of remote sensing satellites with agile attitude control
国外商业遥感卫星姿态控制能力达到了1~4.5(°)/s,利用敏捷控制能力,实现了丰富多样的卫星工作模式,如图1~图4所示。其中图1展示了卫星推扫拼幅成像的工作模式,图2展示了卫星立体拼幅工作模式,图3展示了卫星多点目标快速成像工作模式,图4展示了卫星实现姿态推扫成像和扫描成像工作模式[7]。各种典型的敏捷遥感卫星工作模式,极大地提高了遥感卫星的快速观测、成像覆盖和立体观测能力,促进了遥感卫星商业价值的提升。
3 敏捷姿态控制的意义和作用
3.1 分散目标的快速响应
随着各国空间相机研制能力的提高,欧美等发达国家遥感卫星的空间分辨率已经具有较高水平。同时为了获取多个目标的遥感影像,大多数遥感卫星均具有大角度机动能力和快速姿态机动能力,从而使同一轨道内,卫星能够实现多个目标的遥感探测,大大提升了遥感卫星的使用效率。如卫星侧摆由现在的每轨2~4次,提高到每轨8~16次,同一轨道卫星观测目标个数将提高3倍,相当于原卫星寿命延长3倍获取的有效观察目标数据,因此卫星姿态敏捷技术对提高卫星的综合使用效率和商业价值具有极大的意义,这也正是欧美等发达国家热衷于发展敏捷遥感卫星的初衷。

图1 拼幅工作模式示意图Fig.1 Work mode of piecing images together

图3 多点目标成像工作模式示意图Fig.3 Work mode of viewing multi-areas
3.2 兼顾高分辨率与宽幅成像
高分辨率相机系统在实现高分辨率的同时,为降低难度其视场角较小,导致地面覆盖宽度较小。如美国Ikonos-2卫星的覆盖宽度仅为11km,法国Pleiades卫星覆盖宽度也只达到了20km,光学遥感卫星相对较小的幅宽与大范围的地面目标探测需求成为了一对矛盾。利用敏捷控制技术可实现卫星在俯仰轴、滚动轴的快速指向,以完成幅宽拼接,一定程度上解决了这一问题。同时卫星在姿态控制稳定度上具备了相当的能力后,可采用姿态机动过程中的扫描成像的方式,大大提高图像覆盖能力。因此,姿态的敏捷技术是解决高分辨率成像与大范围覆盖这对矛盾的一条技术捷径。
3.3 地面目标的三维信息获取
图2 立体拼幅工作模式示意图Fig.2 Work mode of piecing stereo images together

图4 推扫成像工作模式示意图[9]Fig.4 Work mode of scanning imaging
随着遥感数据应用的快速发展,获取地面目标的三维信息成为一种新的市场需求。一般情况下,专用的立体测绘卫星需要安装不同指向的两台相机或三台相机,来完成立体观测任务。随着空间分辨率的进一步提高,立体测绘相机的尺寸急剧增大,卫星平台的承载能力受到了极大的挑战。安装单台相机的遥感卫星,利用敏捷控制技术可实现俯仰轴的快速姿态机动,短时间内实现对同一地物的不同角度观测,以满足立体观测需求。这样一来,极大地解决了安装多台相机导致遥感卫星承载能力过大的问题,并且降低了卫星的经济成本和研制难度。
4 姿态敏捷控制技术
敏捷成像卫星需要在保持卫星姿态稳定的同时,根据需要实现卫星姿态短期内的平稳快速机动。采用阶越式的喷气控制,因难以保证姿态稳定而不适用。而目前遥感卫星中广泛使用的姿态平稳控制方式为动量交换式控制,即利用星上飞轮系统角动量变化产生的力矩来实现姿态控制。
各类飞轮系统或力矩陀螺力矩平衡的基本方程
式中:t表示时间;HS为卫星本体角动量;ωS为卫星绝对角速度;HR为飞轮的角动量;ωR为飞轮相对于星体的角速度。
由式(1)可知,在卫星正常飞行时,若外界干扰力矩M为0时,且星体自身角速度引起的角动量方向变化作用于星体上陀螺力矩ωS×HR得到有效补偿后,式(1)右侧为飞轮作用于星体的控制力矩。其中描述了飞轮角动量大小变化的反作用力矩,为星上常用的动量轮控制方式的力矩来源;ωR×HR描述了飞轮角动量方向变化产生的控制力矩,为控制力矩陀螺控制方式的力矩来源。
按一般遥感卫星的质量1~2t测算,其姿态机动轴的转动惯量约为2 500~3 500kg·m2,姿态机动需要较大的控制力矩。动量轮控制方式由于受到最高转速的限制而难以输出较大力矩,目前输出力矩较大的动量轮一般可达到0.5Nm,此时考虑动量轮最高转速影响,对于敏捷卫星,大力矩动量轮其可保证的最快机动能力约为±12(°)/100s,难以满足卫星的工作需求。
控制力矩陀螺转子保持固定转速,可快速改变角动量方向,输出力矩大幅提高,其峰值输出力矩指标可达到10Nm 以上,可大幅度提高卫星的敏捷能力。控制力矩陀螺工作时输出力矩的方向不断变化,因此其在期望控制轴上的输出力矩不断变化,受到饱和限制。为使得控制力矩陀螺工作时,不对卫星其它轴向产生干扰,一般选用两个正交安装的控制力矩陀螺同时工作,相互补偿。由于控制力矩陀螺因输出力矩方向变化而存在饱和控制区间,在使用时需结合卫星最大机动角加速度与机动角度的需求,设计控制力矩陀螺的有效工作区间,以保证卫星机动时角速度的平稳增加。以目前10Nm 控制力矩陀螺为例,选用的两个控制力矩陀螺组合工作时,在有效控制区间可输出峰值约14Nm、平均值约9Nm 的控制力矩,且可连续5s,能够实现敏捷卫星约1(°)/s的峰值角速度和星体5(°)/10s、15(°)/20s、25(°)/30s的机动控制。
为保证未来敏捷卫星更高的快速机动需求,需选择输出力矩更大的控制力矩陀螺,以实现控制方式的灵活设计。在使用时,还需结合卫星结构特点设计合理的控制方式,在实现星体快速机动的同时,保持星体稳定。
5 基于姿态敏捷控制的工作模式设计
5.1 同轨多点目标成像工作模式
同轨多点目标成像模式是利用敏捷卫星的快速姿态指向能力,实现对分散的目标快速成像。这种成像模式主要适用于同轨内距离沿轨迹方向较近的多个成像点的观测任务,利用卫星滚动方向的快速姿态机动能力。图5给出了一种典型的多点目标快速成像工作模式。
在卫星轨道高度和飞行速度确定的条件下,对卫星机动能力的需求,主要取决于观测目标在飞行方向和垂直飞行方向之间的距离。设成像点1、成像点2和成像点3之间相距为200km,卫星轨道高度为500km,卫星速度为7.6km/s,最大滚动角转动范围±45°,则由点3至点2的姿态机动能力至少不小于1.7(°)/s,点2运动至点1的姿态机动能力至少不小于3.4(°)/s
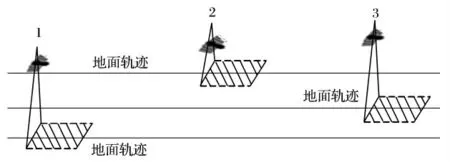
图5 多点目标快速成像模式Fig.5 Work mode of viewing multi-areas of satellite
5.2 同轨立体成像工作模式
同轨立体成像工作模式是指对同一地区实现不同角度的观测以形成立体像对,从而得出该地区的三维成像信息[8]。此种工作模式主要是利用卫星俯仰轴的姿态机动来实现同轨2次或2次以上对同一地物不同角度观测,如图6所示。在不考虑地球曲率的前提下,卫星姿态机动能力需求与卫星的运行速度、地面观测距离和立体观测角度的关系如式(2)所示。

式中:ω1表示姿态机动角速度;h表示卫星轨道高度;D表示地面影像在飞行方向上的观测重叠距离;v表示卫星速度;φ1和φ2为卫星起始和结束的俯仰轴观测角度。
设卫星轨道高度为500km,卫星速度为7.6km/s,可以计算不同地面影像观测距离、前后立体观测角与卫星姿态机动能力的关系,如表2所示。

图6 单线阵同轨立体成像示意图Fig.6 Work mode of stereo imaging of satellite

表2 重叠区域与卫星姿态机动能力的关系Table2 Relation of satellite attitude moving time to overlap area
根据摄影测量原理[9-10],当基高比接近1时,对于图像处理立体效果来说较好,因此可以选取在±25°时进行立体成像,以便得到较好的立体成像效果。在成像区域100km 的条件下,俯仰轴姿态机动能力达到1(°)/s时,基本可以满足需要。
5.3 同轨多条带拼接成像工作模式
同轨多条带拼接成像工作模式是利用快速姿态机动能力,使卫星实现同一轨道多次同向推扫拼接成像,以增大幅宽。该模式要求卫星完成一个条带推扫后,在卫星继续飞行过程中立即进行俯仰方向的反向机动,同时通过一定角度的侧摆将卫星指向平移约一个幅宽的距离,使得后一次推扫的起始条带与前一次推扫的起始条带相邻。这种模式可以得到若干条幅宽和条带长度相同的影像,根据观测目标的不同,可设计有单次、两次甚至多次推扫拼幅的模式,其示意图分别见图7~图9。为了提高立体测绘影像的幅宽,还可以设计同轨拼幅立体成像模式,其示意图见图10。
设卫星轨道高度500km,卫星速度为7.6km/s,地面覆盖达到100km,在不考虑地球曲率的前提下,由式(2)可以计算出不同前后起止观测角与卫星姿态机动能力的关系,如表3所示。实现4条带拼接成像工作模式需要姿态机动能力达到2(°)/s以上。
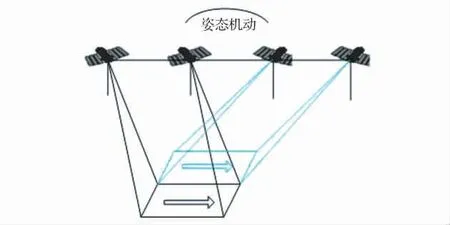
图7 单次拼幅示意图Fig.7 Bi-strip mapping

图8 两次拼幅示意图Fig.8 Tri-strip mapping
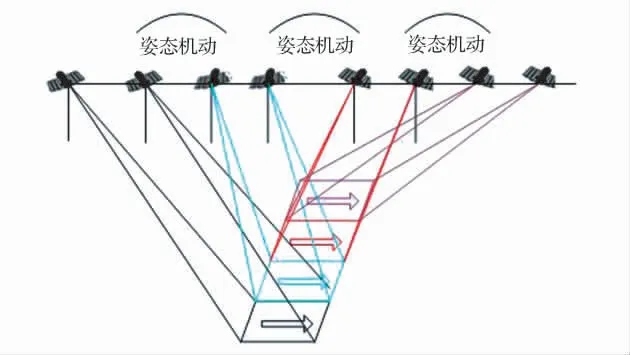
图9 三次拼幅示意图Fig.9 Four strip mapping

图10 同轨两次立体成像示意图Fig.10 Piecing two stereo images together
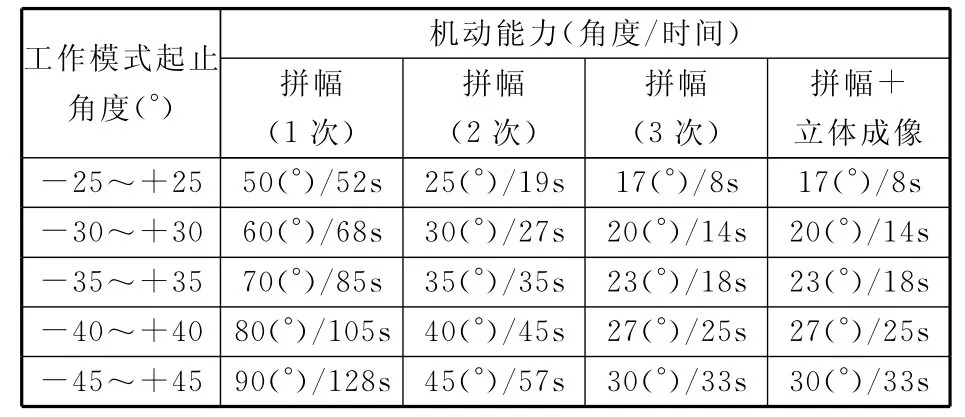
表3 拼接成像对控制系统的要求Table3 Attitude control ability demands of piecing images
5.4 动态扫描成像工作模式
动态扫描成像模式对非沿轨迹方向的狭长地物目标(例如海岸线)具有很好的时效性。当被观测的热点目标不在卫星沿轨迹方向,需要卫星首先进行绕Z 轴旋转一定角度,再利用主动姿态扫描模式进行成像,即可获得非沿轨迹方向的卫星图像。动态扫描成像模式在姿态机动过程中,星体快速达到某一角速度,然后按一定角速度运动,在卫星姿态机动的过程中对地面物体成像,如图11所示。以滚动方向扫描成像为例,扫描角速度与卫星飞行速度和飞行距离的关系如式(3)所示。

式中:ω2表示姿态扫描角速度;v表示卫星速度;φ3表示扫描角度范围;d表示单次扫描所用时间内卫星飞行的距离。
设卫星速度为7.6km/s,相机视场对应的覆盖宽度为25km,单次扫描卫星飞行距离与相机覆盖宽度一致,可得不同扫描成像角度与姿态机动能力的关系如表4所示。若实现滚动方向对地的扫描成像,需要姿态机动能力至少达到6(°)/s以上。

图11 卫星动态成像初步工作模式Fig.11 Primary work mode of dynamic viewing

表4 滚动方向扫描成像对控制系统要求Table4 Attitude control ability demands of scanning imaging in roll axis
综上所述,利用敏捷技术实现姿态的灵活指向,可以实现四种典型工作模式,主要包括同轨多目标成像模式、同轨多条带拼接成像模式、同轨立体成像模式和动态扫描成像模式,如图12所示。采用姿态敏捷控制技术实现遥感卫星灵活多变的工作模式,卫星设计上需重点关注以下两点:一是要进一步提高姿态控制执行机构能力,提供较大的输出力矩和角动量存储能力。对于姿态控制执行机构的选择,可以选用控制力矩陀螺,其能够连续输出较大的转动力矩,提高姿态机动的控制能力。除姿态快速机动外,还需要卫星姿态快速转动的平稳性,以满足相机成像对姿态稳定度的要求。二是要进一步减小卫星转动惯量,降低对执行机构的压力。卫星设计上需采用高性能、高可靠、集成化、小型化的卫星设备,进一步减小设备重量、结构重量和燃料携带量。此外通过合理的设备和结构布局,降低星体的转动惯量,尤为重要的是太阳翼展开后对整星转动惯量的影响。可采用高效率小尺寸太阳翼,并通过合理布局来以减小其展开跨度。

图12 敏捷卫星典型成像模式示意图Fig.12 Typical work mode of remote sensing satellites with agile attitude control
6 结束语
敏捷型遥感卫星是当今遥感卫星的一个重要发展方向,利用姿态敏捷能力,可以制定灵活多变的工作模式,满足国土资源调查、地质勘探、城市规划、国土测绘、防灾减灾和军事侦察等多个领域的需求,极大地提高卫星使用灵活性和观测效率。本文在调研国外典型遥感卫星的机动能力和工作模式的基础上,论证梳理了敏捷控制能力对遥感卫星的重要作用和意义,对敏捷卫星的控制能力进行了初步分析,并结合使用需求对多点目标成像、立体成像、多条带拼接成像、动态扫描成像四种工作模式开展了设计,明确了卫星工作模式与姿态机动能力之间的关系,为未来敏捷卫星的工作模式设计奠定了基础。
(References)
[1]屠善澄.卫星姿态动力学与控制(2)[M].北京:中国宇航出版社,1998:254-259
Tu Shancheng.Satellite attitude dynamics and control(2)[M].Beijing:China Astronautics Press,1998:254-259(in Chinese)
[2]韩昌元.近代高分辨地球成像商业卫星[J].中国光学与应用光学,2010,3(3):201-208
Han Changyuan.Recent earth imaging commercial satellites with high resolutions[J].Chinese Journal of Optics and Applied Optics,2010,3(3):201-208(in Chinese)
[3]杨秉新.美国IKONOS和QuickBird-2卫星相机的主要性能和特点分析及看法[J].航天返回与遥感,2002,23(4):14-16
Yang Bingxin.Characteristics and main specifications of IKONOS and Quick Bird2satellite camera—some points for developing such like satellite camera.[J].Spacecraft Recover &Remote Sensing,2002,23(4):14-16(in Chinese)
[4]郭今昌.商用高分辨率光学遥感卫星及平台技术分析[J].航天器工程,2009,18(2):83-89 Guo Jinchang.Technical analysis of high resolution commercial optical remote sensing satellite[J].Spacecraft Engineering,2009,18(2):83-89(in Chinese)
[5]Niek Schaap.IKNOS:future and present[J].SPIE,2003,4881:660-668
[6]Rye G D,Cox S M.OrbView 2,3and 4[J].SPIE,1999,3870:674-675
[7]Patrice D.Pleiades high resolution satellite:a solution for military and civilian needs in metric-class optical observation[C]//15th Annual/USU conference on Small Satellites.SSC01-I-5,2004
[8]Thierry T.Comparison of stereo-extracted DTM from different high-resolution sensors[J].IEEE Transactions on Geoscience and Remote Sensing,2004,42(10):2121-2129
[9]周胜利.三线阵TDICCD 在测图卫星中的应用分析[J].航天器工程,2007,16(4):19-21
Zhou Shengli.Analysis of three-linear TDICCD array application in cartography Satellite[J].Spacecraft Engineering,2007,16(4):19-21(in Chinese)
[10]王任享.三线阵CCD 影像卫星摄影测量原理[M].北京:测绘出版社,2006:1-23
Wang Renxiang.Satellite photogrammetric principle for three-line-array CCD imagery[M].Beijing:Photogrammetry and Cartography Publisher,2006:1-23 (in Chinese)