卷簧式浅层月壤取样器设计及动力学分析
2011-12-26卢伟宋爱国凌云
卢伟 宋爱国 凌云
(东南大学仪器科学与工程学院,南京 210096)
1 引言
月球是距离地球最近的天体,月壤中富含的核燃料资源氦-3达100万~500万吨,足够地球使用一万年,月球探测具有巨大的经济效益和重大的科学意义[1]。在实现月球表面软着陆后,月球车需要通过取样器收集月壤样品。取样器包括取样臂和取样头两个部分。目前,国内外的行星探测取样器有的采用柔性引线作为取样臂来伸展取样头,如日本“鼹鼠”取样器[2]和美国国家航空航天局(NASA)的“超声/声波取样器”(USDC)[3-4]。不过,引线很难对取样头进行精确控制,因此多数设计仍采用刚性取样臂。刚性取样臂可分为单杆结构和多杆结构。由于单杆结构体积大,且难以收缩,因此在实际中较多使用多杆结构。多杆结构主要有:关节式结构、平行连杆式结构、齿轮齿条式结构和螺筒螺杆式结构。它们通过关节、连杆、齿轮齿条或螺纹螺杆的方式将多节子杆连接在一起,不工作时各子杆收缩在一起,工作时各子杆展开呈一字相连,从而实现工作行程的伸缩。苏联月球-16、20(Luna-16、20)采用的是单杆式月球取样臂[5],美国勇气号(Spirit)、机遇号(Opportunity)火星取样臂采用的是关节式结构[6],美国“勘探者”(Surveyor)月球取样臂采用连杆结构[7],NASA的“低反作用力钻”(LRFD)[8]和蜜蜂机器人公司(Honeybee Robotics Corporation)设计的取样臂[9]都采用螺筒螺杆式结构,北京航空航天大学的多杆深层采样器采用换杆机构进行多杆对接[10]。以上取样器是硬连接,刚性好,推力大,但其采用的驱动电机较多,体积、质量和功耗都较大,且难以降低。月壤是一层密度较小的粉尘状物质[11],本文针对月壤的特性,设计了一种功耗低、质量轻、收缩体积小、展开行程较大的小型月壤取样器,并对其进行了动力学分析和试验研究。
2 取样器的设计
2.1 取样臂的力学模型
取样臂的几何形状为具有一定长度的开口圆柱形薄壳,闭口圆柱形薄壳在各个方向的弯矩特性都是一样的,但开口圆柱形薄壳在不同方向的弯矩特性则有较大差异,其受弯可分为正向受弯和反向受弯[12-13],见图1。取样臂两端受到与Z 坐标轴方向平行、数值为M 的弯矩,反向受弯时,取样臂最初表现出高的抗弯强度;随着M 数值的增加,取样臂开始线性弯曲;当达到最大值Mmax+后,突然局部屈曲,应变能同时产生突变,弯矩减小至M*+,当取样臂屈曲之后弯矩基本保持恒定数值。取样臂正向受弯时,始终表现为弹性,当弯矩达到Mmax-后,取样臂屈曲,弹性骤降,然后基本恒定为M*-。取样臂的弯矩-转角特性曲线如图1(d)所示,图中ψ为绕X 轴的转角。

图1 取样臂受弯图Fig.1 Bending moment of sampling arm
设计中取样臂与取样头的连接关系如图2所示。取样臂下端通过与其垂直的平面与取样头相连,并通过2个螺丝固定到取样头上,2个螺丝固定孔连线到取样臂横截弦线的距离为d。取样臂向下运动时,只会产生反向受弯趋势,此时旋转力臂L<d,取样头最大下推力Fmax=Mmax+/L。

图2 取样臂与取样头连接关系图Fig.2 Connection of sampling arm and sampling head
2.2 取样器的结构设计
取样器[14-15]由取样臂和取样头组成,结构如图3所示。其中,取样臂由三部分组成,即卷簧收缩盒、开口圆柱形薄壳杆及驱动机构。卷簧收缩盒结构如图3(b)所示,开口圆柱形薄壳杆卷绕在恢复轮盘外侧,收缩卷簧外端与恢复轮盘内侧固定连接,收缩卷簧内端固定于收缩盒壳体内固定圆柱的内开“一字型”开口中,收缩卷簧的向内卷缩力使得恢复轮盘始终向内收缩,从而使连接于其上的开口圆柱形薄壳杆始终处于向内收缩趋势。开口圆柱形薄壳杆被夹持在凸滚轮和凹滚轮中,凸滚轮和凹滚轮的外形分别与薄壳杆两侧相吻合,以确保薄壳杆在夹持处不产生扭曲。凸滚轮和凹滚轮表面都覆有软橡胶,以增大摩擦力,从而能够得到理想的最大转矩Mmax+。凹滚轮通过轴承与两端的卡槽相连,两卡槽通过弹簧固定到滚轮支架上;凸滚轮两端通过轴承固定于滚轮支架上,且通过联轴器与电机相连。当电机带动凸滚轮正向旋转时,凸滚轮通过摩擦力带动开口圆柱形薄壳杆向下移动,反之亦然。在本取样臂中,仅需要1个电机就可以实现取样臂的伸展和收缩,功耗较低,且取样臂收缩时体积较小,展开时行程较大。
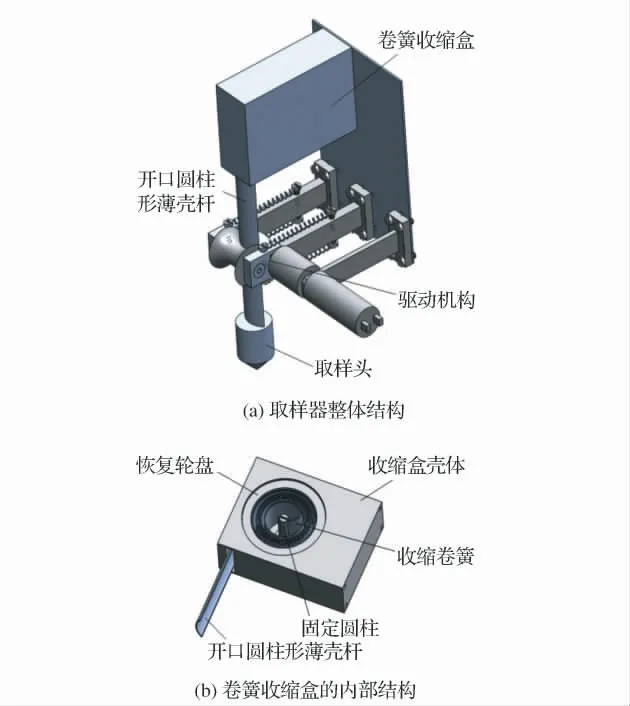
图3 取样器结构图Fig.3 Structure of sampler
取样头[16-17]如图4所示,连接盖按照图2的连接方式与取样臂连接,连接盖与振幅杆之间嵌入了圆柱形振动电机,用于调节取样器的振动频率。取样电机外罩内固定安装小型取样电机,电机通过联轴器带动旋转取样勺旋转取样。旋转取样勺转动一周,即可取满一勺样品,可用于月壤深处原位取样。

图4 取样头结构图Fig.4 Structure of sampling head
3 月壤取样器有限元动力学分析
3.1 取样头的动力学分析
用ANSYS软件建立取样头的结构动力学模型,如图5所示。对取样头进行模态分析,得到取样头的模态频率,如表1所示。其中,一阶、二阶振动为横振,三阶振动为纵振。
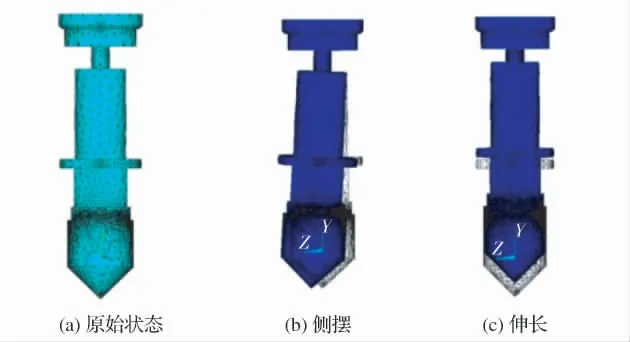
图5 取样头振型图Fig.5 Vibration modes of sampling head
采用FULL法对取样头进行频响分析,在取样头的振子外部两侧施加0.1N 的对称切向力,位移响应谱曲线如图6所示。通过对取样头的模态分析和频响分析可见,其响应峰值都在1 000Hz以上,而取样头与土壤类物体振动时,其自振频率一般约为几十赫兹,因此取样头的自振频率与之偏离较远。

表1 取样头模态频率分析结果Table1 Results of vibration modes analysis for sampling head

图6 取样头的位移响应谱曲线Fig.6 Harmonic response curve of sampling head
3.2 取样器的动力学分析
用ANSYS软件分别建立取样臂为不同长度时取样器的结构动力学模型,并对其进行模态分析,其一阶横振振型如图7所示。
通过仿真分析,得到取样臂为不同长度时一阶横振频率如图8所示。经公式拟合(见图中虚线)可见,取样头一阶横振频率与取样臂长度之间为负幂函数关系。

图7 取样器横振图Fig.7 Horizontal vibration figure of sampler

图8 取样臂长度与一阶横振频率关系曲线Fig.8 Relationship between sampling arm length and main horizontal vibration frequency
再分别采用FULL法对取样臂在不同长度时的取样器进行频响分析,在取样头振子中心位置施加载荷Fx=0.1N,Fy=0.1N,且Fx落后Fy相位90°,可分别得到不同取样臂长度时的响应峰值频率曲线,如图9所示,取样器的共振点频率是取样臂长度的负幂函数。
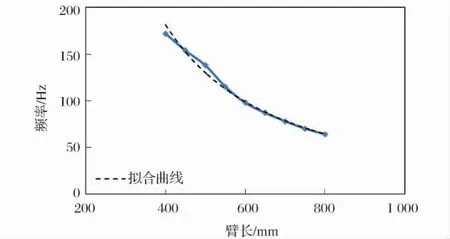
图9 取样臂长度与频响频率关系曲线Fig.9 Relationship between sampling arm length and harmonic response frequency
4 取样器的动力学试验
4.1 信号采集及控制系统
面向动力学试验,设计了相应的信号采集及控制系统。其原理框图如图10所示,试验装置如图11所示。
信号采集及控制系统采样率设定为100kHz/s,可以高速采集伸缩电机的工作电流、取样电机的工作电流、取样头的振动加速度、取样头的振幅以及伸缩杆的长度等信息,同时可以分别控制取样臂的伸缩、取样头的取样以及振动电机的振动频率,电机振动频率调节范围为0~200Hz,最小调节频率为0.1Hz。其数据采集卡选用北京阿尔泰公司的USB2831,上位机软件采用Lab Windows CVI 9.0平台开发。
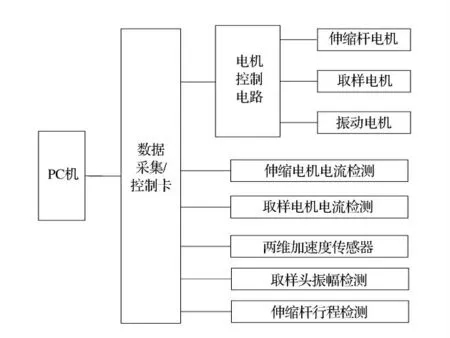
图10 信号采集及控制系统原理框图Fig.10 Diagram of signal acquisition and control system

图11 信号采集及控制系统实物图Fig.11 Photo of signal acquisition and control system
4.2 振动信号的数据处理
首先,对加速度传感器的信号进行两次积分得到振幅信号,再通过线性光电测距模块对振幅信号进行标定。加速度传感器易受周围环境噪声的干扰,且电路器件因温度变化形成零点漂移,使得加速度信号中具有低频偏移,并随时间而缓变,进行两次积分得到的振幅信号会有很大误差,因此,在对加速度信号进行两次积分前,需要消除多项式趋势项。设加速度测量数据为{xk}(k=1,2,3,…,n),由于数据为等间隔采样,为简化,令时间间隔Δt=1,设m 阶多项式函数


加速度信号消除多项式趋势项(采用3次多项式)前后对比,如图12所示。
因为试验环境噪声较大,如空调、说话、关门、走动等,加速度信号的信噪比较差,使用FIR 数字滤波器进行滤波时,需选择高达256阶才能得到较理想的信号,因此,选用滤波能力较为强大的小波包去噪,通过CVI调用MATLAB中的小波函数WDEN,参数分别选择软阈值′s′、′heursure′阈值类型、′mln′非白噪声基本模式,以及sym 小波、分解8层。对消除趋势项后的加速度信号直接两次积分,如图13(a)所示,对消除趋势项后的加速度信号,采用小波滤波后再进行两次积分,其振幅信号如图13(b)所示。由图(13)可见,信噪比得到很大提高。
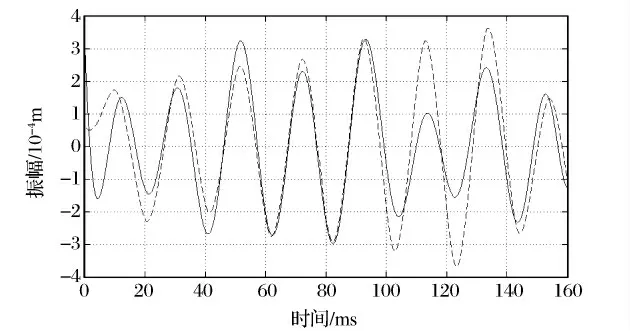
通过线性光电测距模块测量取样头的实际振幅,用其对加速度传感器进行标定,测量的振幅信号与加速度信号两次积分后的信号对比,如图14所示。可见,两者吻合较好。在后续的研究中,可以用加速度传感器信号经过消除趋势项、小波滤波和两次积分后的信号作为取样头的振幅信号。

图12 加速度信号消除趋势项对比Fig.12 Contrast before and after eliminating tendency items for acceleration signal
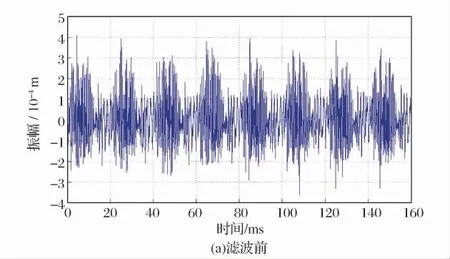
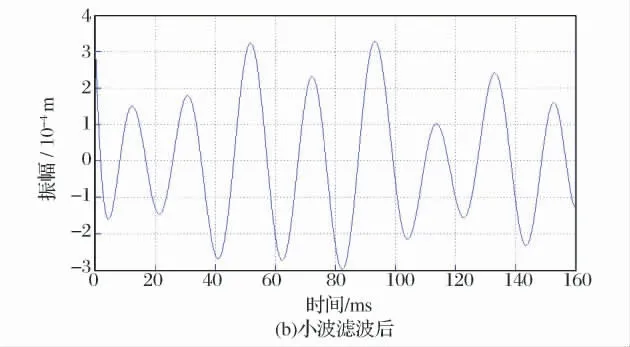
图13 加速度信号滤波前后两次积分对比Fig.13 Twice integral of acceleration signal before and after filter
4.3 动力学试验
在取样器400~800mm 的工作范围内,以100mm为步距调整取样臂的长度,使用上述信号采集处理及控制系统,调整振动电机的振动频率进行扫描。根据前述仿真结果,将扫描频率范围定为1~200Hz,步距为1Hz,经试验分别得到取样臂为不同长度时的一阶横振频率,试验与仿真曲线对比如图15所示。由图可见,试验结果与仿真结果较为一致,经拟合,可给出取样器不同长度时其自振频率的公式为

式中:fo为一阶自振频率;k为系数;ℓ为取样臂长度。再以5mm为步距,在取样头进入水泥样品表面以下40mm 内,分别进行振动试验,以1Hz为步距在1~200Hz范围内调整振动电机的振动频率进行扫描,由试验分别得到取样头进入水泥样品不同深度时的一阶横振频率如图16所示。经拟合,一阶横振频率f 与深度d 满足二次多项式关系

最后,分别对有、无振动时取样头的钻进深度和钻进时间进行试验,在同样推力下,没有振动时取样器平均钻进速度约为2mm/s,其最大钻进深度为58mm。通过动态扫描控制振动电机的振动频率始终接近谐振频率时,取样器平均钻进速度约为3.1mm/s,最大钻进深度为86mm。通过振动能够提高钻进速度约55%,提高钻进深度约48%,明显提高了取样头的钻进效率。
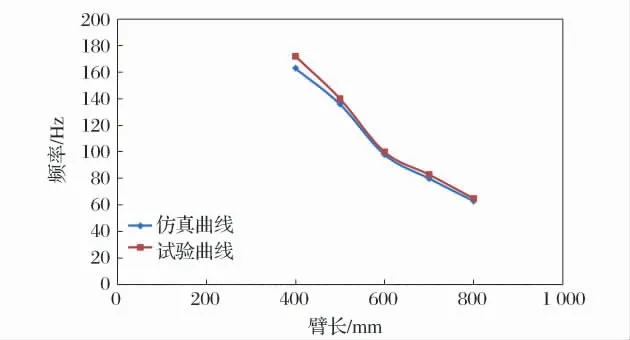
图15 取样臂长度与一阶横振频率关系的试验和仿真曲线Fig.15 Experimental and simulation curves of relationship between sampling arm length and resonance frequency

图16 取样头在水泥样品内深度与一阶横振频率试验曲线Fig.16 Experimental curve of relationship between depth and resonant frequency in cement
5 结论
本文面向浅层月壤,设计了新颖的卷簧式柔性月壤取样器,其功耗低、质量轻、收缩体积小。
通过有限元软件分别完成了取样头和取样臂不同长度时取样器的模态及频响分析,得出了取样头自振频率远离“取样头-月壤”振动系统共振频率的结论,并得到取样器的一阶横振频率与取样臂长度呈负幂函数关系。通过扫频法测量取样臂为不同长度时的自振频率,并与仿真结果进行比较,发现吻合较好。
试验研究了取样头钻取水泥样品时钻进深度与谐振频率的关系,得出钻进深度与谐振频率满足二次多项式关系。最后,在相同推力的条件下,通过试验比较研究了有、无振动时取样头的钻进深度和钻进效率。试验结果证明,振动法能够有效提高取样器钻进效率和钻进深度,这为后续研究取样器的频率自适应控制提供了依据。
(References)
[1]欧阳自远.月球探测的进展与中国的月球探测[J].地质科学情报,2004,23(4):1-5
Ouyang Ziyuan.International lunar exploration progress and Chinese lunar exploration[J].Geological Science and Technology Information,2004,23(4):1-5(in Chinese)
[2]Takashi Kubota,Ichiro Nakatani,Keisuke Watanabe,et al.Study on mole-typed deep driller robot for subsurface exploration[C]//Proceedings of the 2005IEEE International Conference on Robotics and Automation.New York:IEEE,2005:1297-1302
[3]Bar-Cohen Y,Sherrit S,Bao X,et al.Ultrasonic/sonic sampler and sensor platform for in-situ planetary exploration[C]//Proceedings of the 2003IEEE International Conference on MEMS,NANO and Smart Systems.New York:IEEE,2003:22-31
[4]Badescu M,Stroescu S,Sherrit S,et al.Rotary hammer ultrasonic/sonic drill system[C]//Proceedings of the 2008IEEE International Conference on Robotic and Automation.New York:IEEE,2008:602-607
[5]Anttila M.Concept evaluation of mars drilling and sampling instrument[D].Espoo:Helsinki University of Technology,Laboratory of Space Technology,2005
[6]Fleischner R.Concurrent actuator development for the Mars exploration instrument deployment device[C]//Proceeding of the 10thEuropean Space Mechanisms and Tribology Symposium.Paris:ESAPublications Division,2003:255-262
[7]Bucek M,Agui J H,Zeng Xiangwu,et al.Experimental measurements of excavation forces in lunar soil test beds[C]//Proceedings of the 11th Aerospace Division International Conference on Engineering,Science,Con-struction,and Operations in Challenging Environments.Long Beach,California:ASCE,2008:1-10
[8]Hill III J L,Shenhar J,Lombardo M.Tethered,downhole-motor drilling system-a benefit to mars exploration[J].Adv.Space Res.2003,31(11):2321-2326
[9]Beaty D W,Miller S,Zimmerman W,et al.Planning for a Mars in situ sample preparation and distribution(SPAD)system[J].Planetary and Space Science.2004,52(1):55-66
[10]丁希仑,李可佳,尹忠旺.面向月壤采集的多杆深层采样器[J].宇航学报,2009,30(3):1189-1194
Ding Xilun,Li Kejia,Yin Zhongwang.Multi-rod deep driller for lunar subsurface sampling[J].Jounarl of Astronautics,2009,30(3):1189-1194(in Chinses)
[11]杨艳静,向树红.模拟月壤力学性质的试验和仿真研究[J].航天器环境工程,2009,26(12):1-4
Yang Yanjing,Xiang Shuhong.The experimental and emulational studies of mechanical properties of lunar soil of stimulant[J].Spacecraft Environment Engineering,2009,26(12):1-4(in Chinese)
[12]SoykasapÖmer.Analysis of Tape Spring Hinges[J].International Journal of Mechanical Science,2007,49(7):853-860
[13]Walker S J I,Aglietti G S.Modeling the hinge moment of skew-mounted tape spring folds[J].Journal of Aerospace Engineering,2007,20(2):102-115
[14]Gao Yang,Ellery A,Jaddou M.,et al.Planetary micro-penetrator concept study with biomimetric drill and sample design[J].Transactions on Aerospace and Electronic Systems,2007,43(3):875-885
[15]Lu Wei,Song Aiguo,Hao Fei.Design and analysis of spring roll-style retractable sampling arm[C]//Proceedings of the 2010IEEE International Conference on Information and Automation.New York:IEEE,2010:2374-2378
[16]Xiao M,Karube S,Soutome T,et al.Analysis of chatter suppression in vibration cutting [J].International Journal of Machine Tools and Manufacture,2002,42(15):1677-1685
[17]Nath C,Rahman M.Effect of machining parameters in ultrasonic vibration cutting[J].International Journal of Machine Tools and Manufacture,2008,48(9):965-974