航天器铷钟的一种精密控温系统
2011-12-26李国强耿利寅童叶龙
李国强 耿利寅 童叶龙
(北京空间飞行器总体设计部,北京 100094)
1 引言
随着航天技术的不断发展,某些星载有效载荷对其工作温度控制精度、温度稳定度提出了更高的要求。例如,美国与德国合作的地球重力场恢复与气候实验卫星(GRACE)的铷钟,要求工作温度稳定在每个轨道周期±0.1K[1];某些星载光学系统对控温精度也提出了较高的要求[2-4]。
航天器在近地轨道飞行时,轨道外热流波动和舱内热源的变化会影响整星的温度水平。近地轨道航天器的轨道外热流由太阳直射、地球对太阳的反射和地球红外辐射三部分组成。航天器吸收的轨道外热流会随其表面热光学性质及航天器在轨位置、姿态的变化而变化[5]。而作为单个舱内设备,它的温度不仅受自身热耗的影响,而且还与整星温度场密切相关。对于部分暴露在舱外的设备,其温度水平还直接受到轨道外热流波动的影响。因此,对有高精度控温需求的设备,需要与外部热扰动隔离,并采用分级控制的电加热主动控温技术,以对其提供精确的温度控制。
2 航天器精密控温方法及其特性
航天器关键设备的精密控温手段通常是以下3种方式的综合:①隔热设计,即尽量减少需要控温的仪器设备与其他设备之间的热量传递;②设计传热途径以排散内热耗;③采用电加热的主动控温[6]。
目前采用的控温加热方法主要有两种:常规电子开关型控温仪和智能型控温仪[7]。常规电子开关型控温仪较为简单,可以满足大多数对工作温度有一定要求的设备的控温需求。智能型控温仪一般适用于有精密控温需求的仪器设备,其控温精度主要受热设计的合理性、测温精度、控温算法的影响。
当被控对象温度低于设定值时,通过加热器加热,其温度迅速升高;当温度高于设定值时,加热器停止加热,完全依靠自然冷却降低温度,与加热时间相比,降温时间相对较长,出现控制策略上的不对称性。这就要求在低温控制段采取谨慎的动作,防止出现超调过大[8];因此可采用偏冷设计方法,即按低温工况设计控温功率,同时保证在高温工况下也需要进行控温加热。
3 航天器精密控温系统构成
航天器精密控温系统主要由DC/DC 电源模块、多路切换开关、模拟/数字(A/D)信号转换器、现场可编程门阵列(FPGA)系统、数字信号处理器(DSP)系统、输出加热驱动电路等组成;本系统共有8路测温通道和6路控温回路,8路测温通道中有6路热敏电阻测温通道和2路标准电阻测温通道,如图1所示。图中,Rt1~Rt8为测温电阻,Q1~Q6为输出的加热功率。
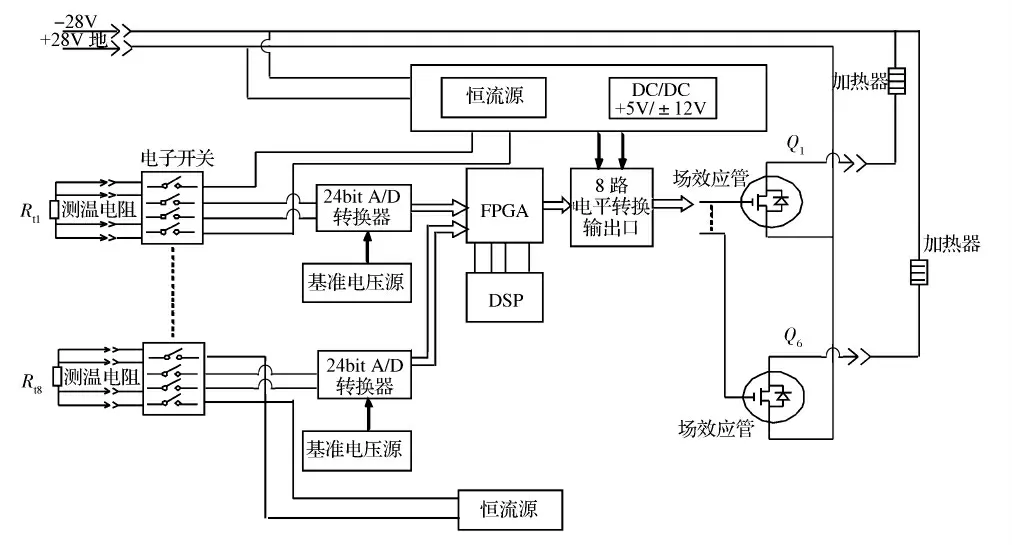
图1 精密测控温系统硬件框图Fig.1 Block diagram of the precise temperature control system’s hardware
1)航天器精密控温系统工作原理
热敏电阻经多路开关电路送至信号调理电路完成温度-电压转换,再经过A/D 转换送入DSP 和FPGA,软件对电压信号进行计算,计算出控温点的温度数据,再将温度信号与控温目标值相比后得到差值,采用RBF神经网络PID算法或积分分离PID算法生成相应的加热控制信号,输出给由场效应管组成的加热驱动电路。
2)测温模块
主要采取如下措施以提高测温精度:直流恒流源微安级电流;四线制测量电路;高分辨率(24位)A/D 转换器;数字滤波等;同时设置两路标准电阻,以消除系统漂移的影响。实际测量表明:在较窄的温度范围内(15~25℃)测温精度可达±0.01℃。
3)控温模块
加热控制所需能量E=U×Ⅰ×t,其中U为加热电压,Ⅰ为加热电流,t为加热时间,调节U、Ⅰ、t中任一因子即可达到调温的目的;PWM 调制控制一个循环周期内的加热时间t完成控制任务,无需可控硅等电流调节器件,适合直流供电控制场合。通过RBF神经网络PID算法或积分分离PID算法计算得到一个循环周期内的加热时间t。
4 试验验证
4.1 铷钟模型简介
铷钟模拟件实物如图2所示,由底板、壳体和铷钟恒温箱组成。
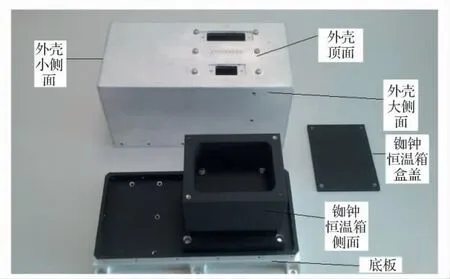
图2 铷钟模拟件实物图Fig.2 Simulator of rubidium atomic clock
用于试验的铷钟模拟件为满足热要求的结构模拟件,其材料为铝合金,外表面除安装底板以外包覆多层隔热组件,安装底板部分区域粘贴镀铝聚酰亚胺膜作为散热面,其他区域也包覆多层隔热组件。内部区域全部发黑处理,以增加红外发射率,减小内部元件之间的温差。
在铷钟恒温箱底面、底板外侧各设计一路加热回路,分别模拟设备工作过程中产生的热量和铷钟吸收的外热流。
在铷钟模拟件上设计6路控温回路,分别为壳体外侧布置3路控温回路,底板内侧、铷钟恒温箱4个侧面及盒盖各布置1路控温回路。控温回路对应位置如表1所示。

表1 控温回路对应位置表Table1 Relationship between control loop and location
其中,控温回路1可选择RBF神经网络PID 控制或积分分离PID,其他5路控温回路均采用积分分离PID 控制;控温回路1、2、3为内部级,其中控温回路1为核心级,即主控单元,控温回路4、5、6为外部级。
4.2 试验工况及结果分析
考虑到航天器吸收的外热流长期瞬态变化以及星内设备的间歇式工作,本次试验设计验证目标有:系统的稳定控温精度;系统在阶跃扰动(内热耗)和类似正弦扰动(外热流)下的控温性能;系统控温的稳定度。因此,试验的工况如下。
1)稳定控温精度
稳态外热流为3.16W,无内热耗下的稳定控温效果。试验测试了温度在15~25℃时的6 路控温回路的稳态控温精度。选择了控温中心温度1和控温中心温度2两组不同控温点,见表2。

表2 控温点列表Table2 Tabulate of setting temperature℃
试验结果如图3所示。
从图3(a)、(b)、(c)可知,铷钟模拟件控温系统内部级控温目标温度分别为24.50℃、23.00℃、19.00℃、17.00℃、15.80℃时稳态控温精度均可达±0.08℃;由图3(d)可知,外部三路稳态控温精度均可达到±0.25℃。
外部三路控温精度大于核心级控温精度(±0.1℃)的原因:外部三路均作用于外壳上的,外壳为铝制材料,导热热阻比较小,热耦合作用很强。当三路控温回路设置不同控温中心点,必定会相互干扰。因此,对于热耦合很强的部件即相互换热能力强的部件,应作为同一级,设置一个控温中心点。
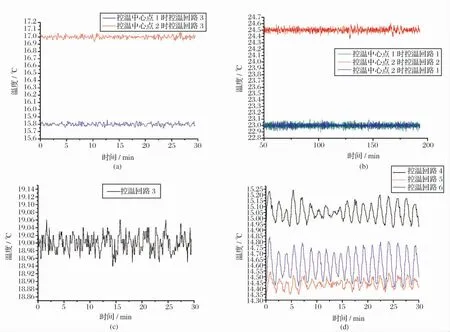
图3 稳态工况下温度变化曲线Fig.3 Temperature curve in steady case
2)内热耗阶跃扰动下的系统性能测试
在外热流稳定、系统稳定的条件下,通过开启或关闭设备(热耗模拟回路同时开启或关闭),验证和测试控温系统在被控对象内热源发生较大变化时的性能。
对第一路控温回路施加RBF神经网络PID算法或积分分离PID算法,开启3W 内热耗,工作20min,关闭内热耗。3W 内热耗冲击下各个控温回路的温度变化曲线如图4所示。
由图4(a)可知,3W 工作20min的内热耗冲击可使第2路温度在大范围内(19~23℃)波动,但对主控单元几乎没有影响,从而验证了铷钟模拟件控温系统控温能力强和抗内热扰动能力强。
内热耗冲击对控温回路3有较大影响,使控温回路3的温度偏离控温中心点+0.4℃。
第2路温度控制值比第3路高,向第3路传热,因此对第3路温度水平影响大;而第1路温度控制值比第2路高,因此对第1 路温度水平影响较小。因此,外面级控温中心点比主控单元控温中心点低,是精密控温的一个解决办法。
由图4(b)可知,当主控单元采用RBF 神经网络PID 控制,仍能稳定地控制在23±0.09℃;采用积分分离PID算法可以实现23±0.15℃控温精度。由此可知,与积分分离PID 控制相比,在内热源扰动下,采用RBF神经网络PID 控制的被控对象具有更小的温度波动。
3)外热流瞬态变化下的系统性能测试
在铷钟热耗稳定、控温系统正常工作且稳定的条件下,施加瞬态外热流(本次试验按照LEO 太阳同步轨道常见的类似正弦曲线),测试和验证外热流瞬态变化下的控温系统性能。
由图5(a)可知,外热流扰动对内部三级的控温几乎无影响,对外部三路有一定的影响,在±0.3℃内周期性波动;由图5(b)可知,当主控单元采用RBF神经网络PID控制,仍能达到±0.08℃的控温精度。当主控单元采用积分分离PID 控制,能达到±0.11℃的控温精度,因此,与积分分离PID控制相比,RBF神经网络PID控制抗外热流正弦扰动能力更强。

图4 内热源扰动下温度变化曲线Fig.4 Temperature curve under perturbation of internal heat flux
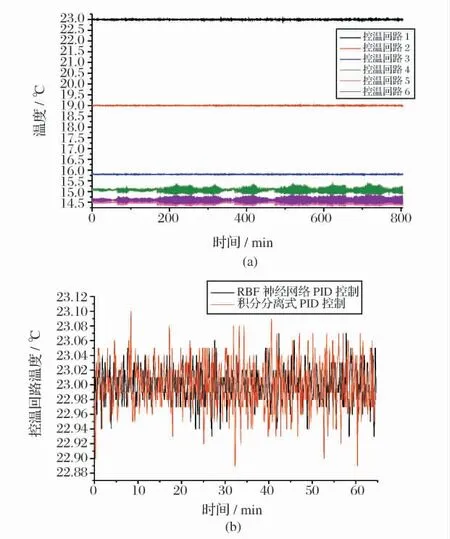
图5 外热流扰动下的温度变化曲线Fig.5 Temperature curve under perturbation of orbit heat flux
4)控温系统稳定度测试
在内热源阶跃扰动或外热流周期性扰动且系统稳定的条件下,连续工作24h,测试其核心级控温的稳定度。
由图6可知,在内热源阶跃扰动或外热流周期性扰动下,主控单元采用RBF 神经网络PID算法,其控温稳定度优于0.1℃/d,实测为±0.08℃/d。

图6 主控单元温度变化曲线Fig.6 Temperature curve of the core stage
5 结论
以航天器铷钟为控制对象的精密温度控制,通过控制系统辨识,使用基于RBF神经网络PID 和积分分离PID 的模型辨识控制算法,可以大大提高系统的鲁棒性和抗干扰性,控制方式采用PWM,而不是开关控制,可以实现高精度和高稳定度的热控制。
通过对控制对象进行分级温度控制的热平衡试验结果表明,在内热源或外热源扰动下,采用神经网络PID算法,控温精度均可达到±0.08℃;控温稳定度实测为±0.08℃/d;通过使用高精度热敏电阻的信号调理电路,选用24位A/D 转换器进行温度的数据量化,消除了测温误差,使测温精度优于0.01℃。该精密控温系统不仅可应用于星钟,也可应用于高分辨率光学相机的控温。
(References)
[1]Markus Schelkle.Small satellite design:Thermal control[R/OL].(2005)[2011-5-20].http://www.irs.uni-stuttgart.de/skript/KSE/KSE-WS051104_WWW.pdf.
[2]Aarona Kim M.Space interferometry mission thermal design[J].Interferometry in Space,2003,4852:49-58
[3]Grob Eric W.Mission performance of the GLAS ther-mal control system-7 years in orbit[R].NASA,NASA-20100021970,2010
[4]Havey Keith A.Precision thermal control trades for telescope systems[C]//Hawaii:Part of the SPIE Conference on Space Telescopes and Instruments,1998
[5]侯增祺,胡金刚.航天器热控制技术——原理及其应用[M].北京:中国科学技术出版社,2007:113-116
Hou Zengqi,Hu Jingang.Foundation and application of spacecraft thermal control technology[M].Beijing:China Science and Technology Press,2007:113-116 (in Chinese)
[6]Gilmore D G.Satellite thermal control handbook[Z].California:The Aerospace Corporation Press El Segundo,2002:639-666
[7]李国强,姚根和.中国星载CCD 相机控温仪性能比较[J].航天返回与遥感,2006,27(4):44-48
Li Guoqiang,Yao Genhe.Property comparison of thermal controller for CCD camera loading in China satellite[J].Spacecraft Recovery & Remote Sensing,2006,27(4):44-48(in Chinese)
[8]李晓帆,姚根和.高精度温度控制技术[J].怀化学院学 报,2007,26(5):47-51
Li Xiaofan,Yao Genhe.Acontrol technology of temperature for severe precision[J].Journal of Huaihua University,2007,26(5):47-51(in Chinese)