从ETS-VII到HTV——日本交会对接/停靠技术研究
2011-12-26朱仁璋王鸿芳徐宇杰魏羽良
朱仁璋 王鸿芳 徐宇杰 魏羽良
(1 南京大学,南京 210093)
(2 中国空间技术研究院,北京 100094)
(3 北京航空航天大学,北京 100191)
1 引言
航天器交会对接/停靠技术是载人航天工程的关键技术之一。作为“国际空间站”(International Space Station,ISS)的参与方,日本交会对接/停靠技术的研发,是直接为ISS项目服务的。1992年9月12日,日本迈出了载人航天第一步。这一天,航天员毛利卫(Mamoru Mohri)乘坐奋进号航天飞机进入太空,执行空间科学实验任务。(第一位进入太空的日本人是记者秋山丰宽(Toyohiro Akiyama),他乘坐1990年12月2日发射的联盟号飞船进入和平号空间站,12月10日返回地球。)1997年11月24日,在航天飞机STS-87飞行使命中,日本航天员土井隆雄(Takao Doi)从哥伦比亚号航天飞机出舱,成为第一位执行舱外活动的日本人。四天后,即11月28日,日本发射了工程试验卫星-7(Engineering Test Satellite VII,ETS-VII)。在1998年7月 至1999年9月期间,ETS-VII成功进行了交会对接(Rendezvous and Docking,RVD)与捕获停靠飞行试验。2000年10月,日本航天员若田光一(Koichi Wakata)乘坐发现号航天飞机到达ISS,成为日本第一位在ISS工作的航天员。接着,从2008年3月至2009年7月,通过航天飞机的3次发射(STS-123,124,127)与在轨组装,日本实验舱(Japanese Experiment Module,JEM)成为ISS的组成部分。在JEM 组装完成后的一个多月,2009年9月11日,日本发射了H-II转移飞行器(H-II Transfer Vehicle,HTV),为ISS提供货运服务。
停靠是在自动臂的引导下,实现对接机构的联接。在停靠运作中,自动臂可安装在追踪飞行器上,如卫星捕获中的联接;也可安装在目标飞行器上,如在载人空间站的停靠。停靠可实现无冲击联接,又具有空间机械运作的灵便性。日本ETS-VII主星与子星进行了交会对接试验,也应用主星(追踪星)的自动臂进行了捕获/停靠试验。HTV 与ISS的联接是应用空间站遥操作器系统(Space Station Remote Manipulator System,SSRMS)实现的。通过ETS-VII与HTV 研发的交会对接/停靠技术,对日本今后空间活动的扩展具有重要意义[1-4]。
2 工程试验卫星-7(ETS-VII)
2.1 ETS-VII概述[5-8]
ETS-VII是由两颗卫星组成的双星系统,进行在轨分离与交会对接,以及应用自动臂转移有效载荷与捕获/停靠等技术试验。ETS-VII 主星(2 480kg)名为“牛郎(星)”(Hikoboshi;Altair),子星(410kg)名为“织女(星)”(Orihime;Vega)。两星连在一起由日本H-II火箭于1997年11月28日发射,进入高度550km、倾角35°的目标轨道。在交会对接试验期间,子星(目标星)从主星(追踪星)释放出,成功进行了V-bar逼近与R-bar逼近技术试验(参见图1与表1)。交会对接试验在1998年7月7日进行,这一天恰逢日本七夕节,“牛郎”与“织女”喜相会。ETS-VII自主交会与软对接试验应用相对GPS,激光交会雷达,以及邻近敏感器技术。在这些试验中,目标星是合作目标,执行姿态控制与通信数据链接,并装备全球定位系统(Global Positioning System,GPS)接收机及交会敏感器反射器或标记。在空间自动机(Space Robot,RBT)基本试验期间,目标星与追踪星由对接机构连接在一起。长为2m、6自由度的自动臂安装在追踪星上,由日本地面控制站遥控操作。除了交会对接与空间自动机基本试验外,ETS-VII还应用视觉伺服跟踪技术进行卫星自动捕获与停靠试验,作为附加的自动机试验(参见表1)。
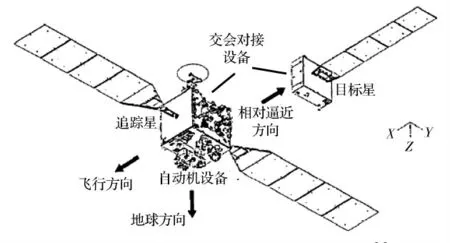
图1 在轨RVD 试验期间的ETS-VII卫星[5]Fig.1 ETS-VII satellites on orbit(during RVD experiment)
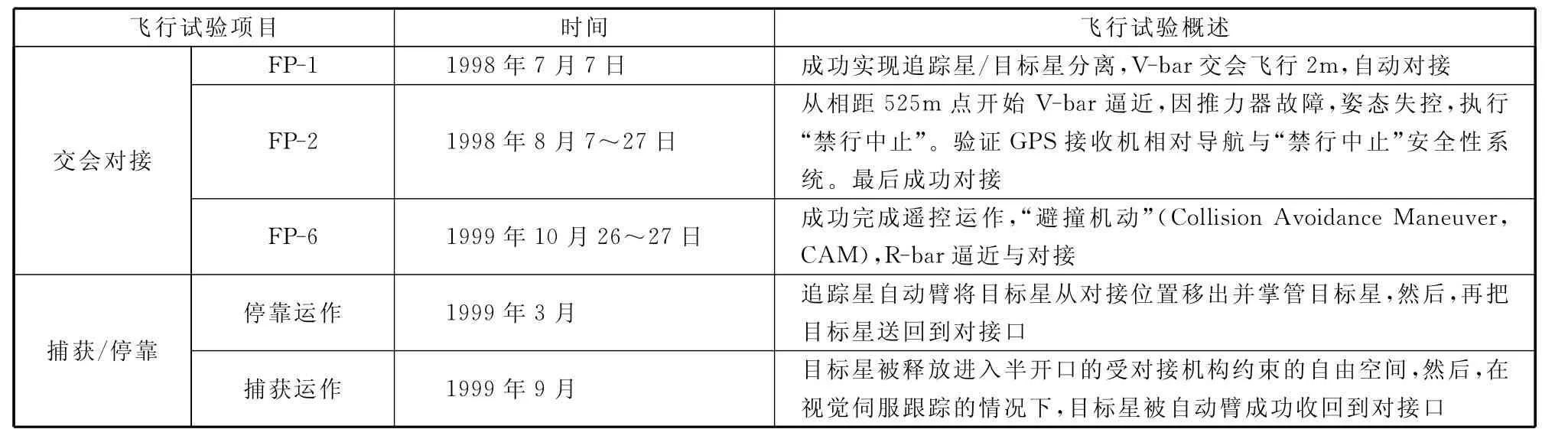
表1 ETS-VII交会对接与捕获/停靠飞行试验Table1 RVD and RBT flight experiments of ETS-VII
2.2 ETS-VII系统组成
ETS-VII由主星与子星两部分组成,其主要特 性如表2所示。
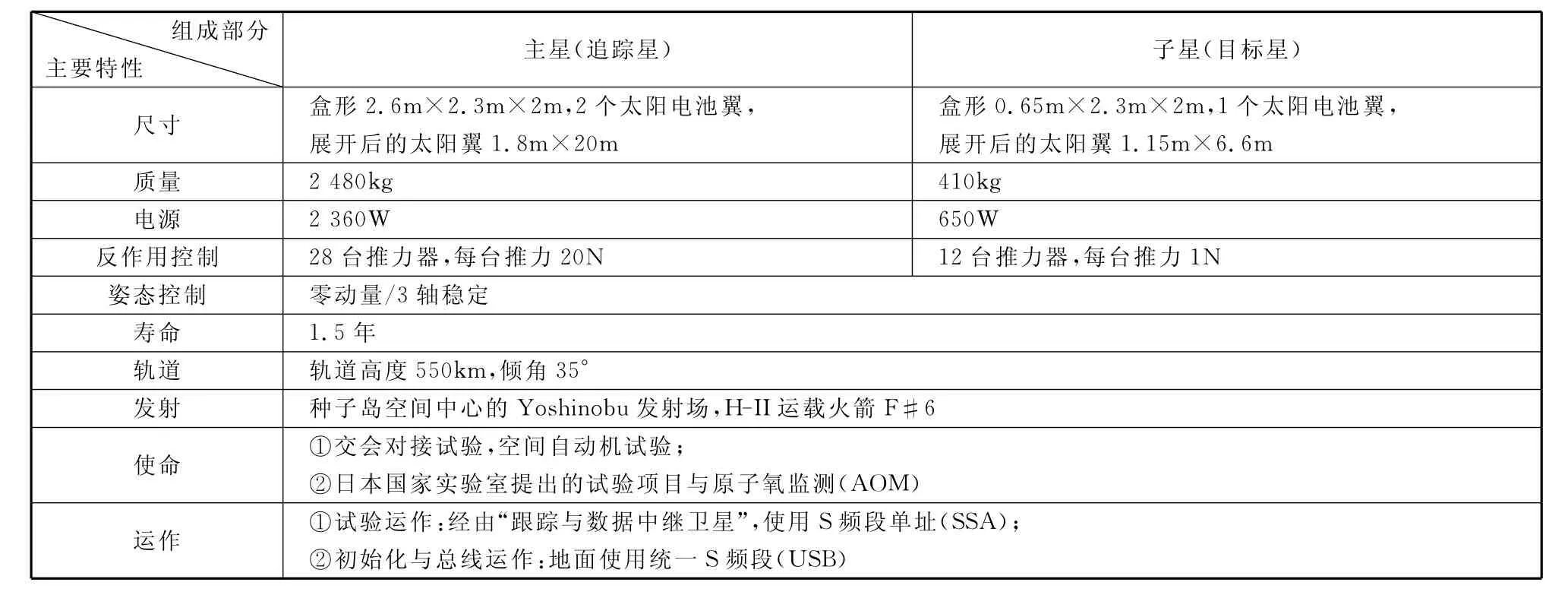
表2 ETS-VII主要特性[5]Table2 Main characteristics of ETS-VII
2.3 EVS-VII通信与星上控制技术[5-6,9-10]
2.3.1 ETS-VII通信技术
对ETS-VII交会对接与空间自动机试验,监测目标星及追踪星自动臂的运动是十分重要的。在交会对接试验中,观察相机与对接相机用于监测目标星与对接运作;而安装在追踪星上的自动臂手眼相机与自动臂监测相机用于空间自动机试验。为了从图像监测交会对接试验中的目标星或空间自动机试验中的自动臂的行为,追踪星以1.5Mbit/s的数据传输速率向日本筑波空间中心发送遥测数据,运作时间超过1.5h。由于ETS-VII是高度为550km 的低地球轨道卫星,与地面站的直接通信时间很短,仅应用常规的统一S频段(USB)链路是不够的,最佳解决办法之一是应用NASA“跟踪与数据中继卫星系统”(Tracking and Data Relay Satellite System,TDRSS)的轨道间通信。图2为ETS-VII通信链路图。如图2所示,ETS-VII与地面之间的通信链路如下:①追踪星与地面站之间的SSA-HG(SSA-高增益),SSA-OMNI(SSA-全 向),以 及USB 链 路;②目标星与地面站之间的SSA-OMNI与USB 链路。直接与地面站通信的USB 链路主要用于初始运作或星务管理运作。除USB链路外,其他链路均应用ETS-VII/TDRS试验系统。此外,追踪星与目标星可由“追踪星-目标星”(C-T)通信链路互相通信。TDRS数据传送给戈达德空间飞行中心。该中心与日本筑波空间中心由国际地面网相连。从指令发送直到接收相应的遥测数据的时间大约为6s。

图2 ETS-VII通信链路[5]Fig.2 ETS-VII communications link
2.3.2 ETS-VII星上控制
星上姿态控制计算机与星上自动机控制计算机,分别执行卫星姿态控制与星上自动臂控制任务;还有一台星上计算机,即制导与控制计算机,用于交会对接运作(参见图3)。选择这种分布式控制方法的理由是:①自动臂(6自由度)与卫星姿态运动(3自由度)及交会对接(6自由度)的联合自由度太复杂,空间计算机难以统一处理。②卫星姿态控制是成熟技术,应用成熟技术与设备有利于节省成本。③对分布式控制,单个系统的研制与测试可分开进行,加快卫星研制速度。④来自卫星姿态控制与自动臂控制及交会对接的计算要求是不同的(对自动臂控制的要求最严格,对卫星姿态控制的要求适度,而对交会对接的要求居中),分布式控制有利于计算资源的配置。
星上卫星姿态控制系统执行卫星姿态与天线方向控制任务。姿态敏感器为地球敏感器与基于陀螺的惯性参照单元,用于测量卫星姿态运动。姿态控制执行器件包括反作用轮与气体喷射推力器。反作用轮用于生成控制力矩,以修正卫星姿态偏差;而气体喷射推力器实施反作用轮动量的退饱和,并修正反作用轮不能应对的大姿态偏差。通信天线安装在带有2个万向架的支座上,天线方向的控制依据追踪星的姿态误差以及数据中继卫星离两个在轨卫星的位置实现的。卫星姿态控制与天线方向控制由星上控制计算机管理。

图3 ETS-VII星上系统流程框图[10]Fig.3 Block diagram of the onboard system of ETS-VII
2.4 ETS-VII交会对接技术[8-9,11-16]
2.4.1 试验目的
ETS-VII交会对接主要技术验证项目如下:①交会对接设备的功能和性能,包括新研发的交会导航敏感器(如激光交会雷达)与对接机构。②交会对接制导、导航与控制(Guidance Navigation and Control,GNC)技术,包括交会对接导航和制导逻辑与星上自主飞行管理功能(含模式控制),以及在交会飞行期间控制两个飞行器的交会对接运作技术,特别是应用星上飞行管理功能的安全性保证运作。③应用数据中继卫星的通信技术与遥控操作技术。
从起飞到对接,ETS-VII飞行可分为下列5个阶段:①发射;②轨道转移;③相对逼近;④最终逼近;⑤对接。试验的主要目标是演示并证实后3个阶段的自主交会对接技术。轨道转移段的主要技术(如GPS绝对导航与自主轨道转移),通过试验也得到验证。不仅自主交会对接,地面遥控操作交会对接也在试验中得到验证。
2.4.2系统组成
ETS-VII交会对接试验应用两个卫星的平台系统,交会对接试验系统,以及视觉系统。ETS-VII执行自主交会对接,因此需要测定追踪星与目标星之间相对位置与速率的导航功能。ETS-VII有3种导航方法,根据两颗卫星之间的距离自动选择其中一种:①用于相对逼近段(从10km到500m)的相对GPS导航;②用于最终逼近段(从500m到2m)的激光交会雷达导航;③用于对接段(2m 以内)的邻近敏感器导航。如前所述,ETS-VII与地面控制系统(位于筑波空间中心)之间的通信链路是通过TDRS实现的。图4显示交会对接试验的相关系统。
追踪星主动执行交会对接控制,星上交会对接试验系统包括制导与控制计算机,GPS 接收机,激光交会雷达,相机型邻近敏感器,加速度计,以及对接机构主动部分(掣爪系统)。追踪星上装备两台CCD 相机,一台观察相机用于监测逼近,一台对接相机用于监测对接过程中对接机构和目标星的移动。目标星仅执行姿态控制,并装备配合追踪星执行交会对接使命的合作设备,包括GPS接收机,被动激光交会雷达反射器,邻近敏感器标记,观察相机标记,以及对接机构的被动部分(捕获把手)。
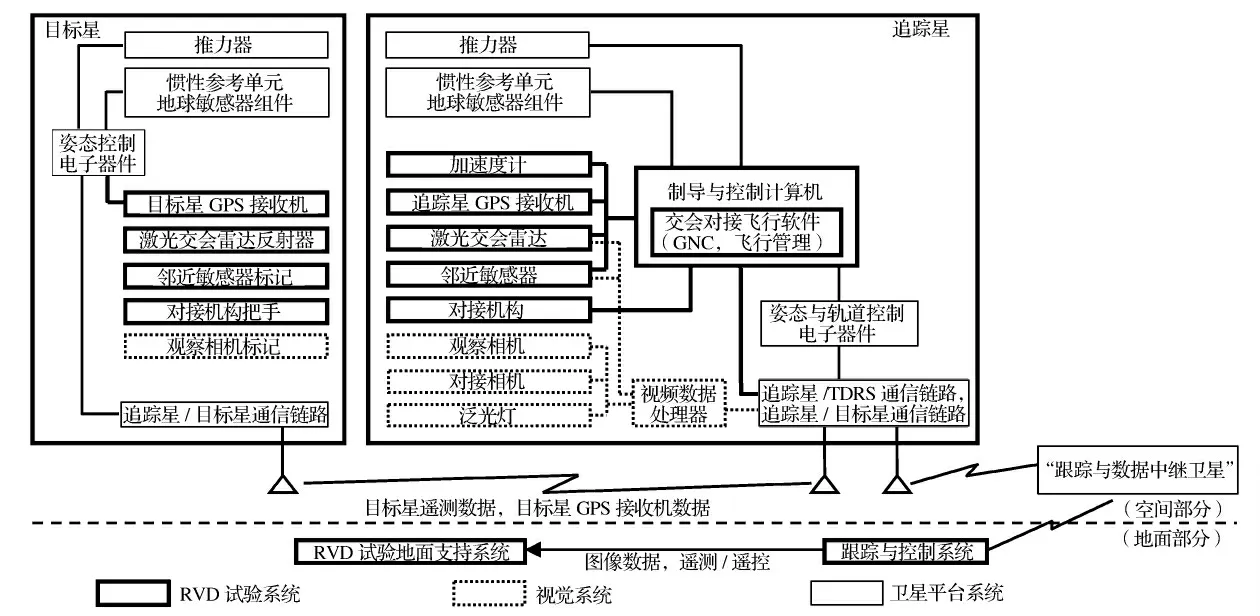
图4 ETS-VII RVD相关系统结构[8]Fig.4 ETS-VII RVD relating systems
2.4.2.1 对接机构
对接机构具有捕获、对接及分离功能,对接机构的主动部分与被动部分分别装配在追踪星与目标星的对接面板上,主要由捕获装置和锁紧释放装置两部分组成(参见图5与图6)。捕获装置由装配在追踪星上的3个掣爪系统(主动部分)与装配在目标星上的3个捕获把手(被动部分)组成,执行捕获运作。在追踪星对接面板上装有4个锁紧释放装置,在目标星对接面板上有4个锁紧释放装置配对器,用于目标星捕获后的锁紧及分离前的释放。在对接阶段,对接机构在2s内捕获目标星。在分离阶段,对接机构以大约2cm/s的速度分离与释放目标星。
2.4.2.2 激光交会雷达
交会雷达(图7)是使用近红外激光束的激光雷达,也是组成ETS-VII交会对接系统的3种导航敏感器之一。另外两种敏感器是GPS接收机和邻近敏感器。这些敏感器都向制导与控制计算机提供目标星和追踪星之间的相对距离和相对角度测量信息。交会雷达在0.3m~660m 的范围内使用,测量两颗卫星之间的相对距离和相对角度。GPS接收机用于远距离,邻近敏感器用于邻近范围。这些敏感器的测量范围是相互交迭的,这是功能冗余的需要。
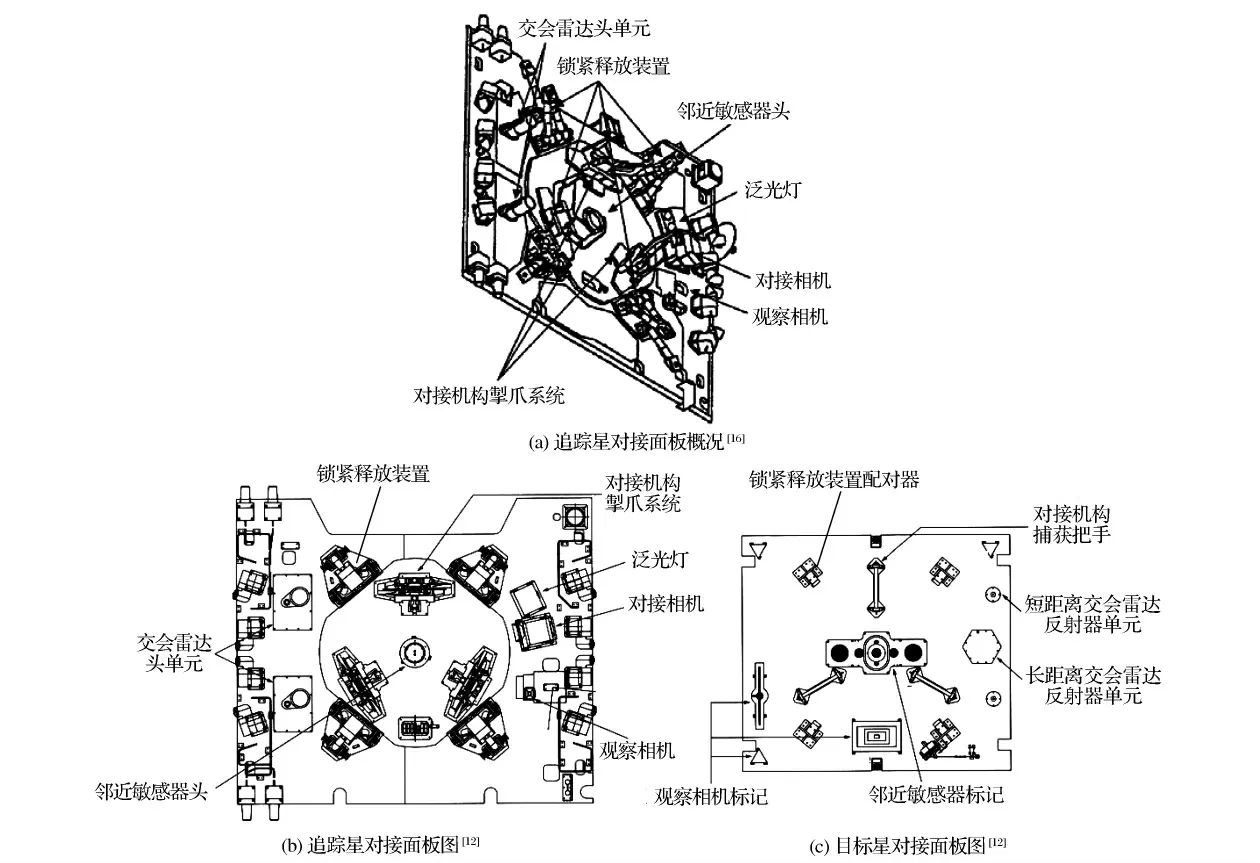
图5 ETS-VII对接面(沿X 向)Fig.5 ETS-VII docking surfaces

图6 ETS-VII对接机构捕获装置[11]Fig.6 Capture mechanism of ETS-VII DM

图7 ETS-VII激光交会雷达外形[13]Fig 7 Outlook of ETS-VII rendezvous radar(RVR)
交会雷达由下列三部分组成:①交会雷达头单元;②电子器件单元;③反射器单元。①和②安装在追踪星上,③安装在目标星上。激光束从交会雷达头发射,被反射器反射,再被交会雷达头接收。两星之间相对距离,由发射激光束和反射激光束的已调制束包线之间的相位差的测量得到。两星的视线角由反射器的图像测量导出,通过图像识别方法进行图像辨识。
(1)交会雷达头。交会雷达头向反射器发射波长为810nm 的激光束,半锥角约4°。交会雷达头也接收来自反射器的激光束。
(2)电子器件。电子器件按来自交会雷达头的信号计算相对距离和方向,计算结果被送往制导与控制计算机。为了测量相对距离与方向,反射激光束被导向“雪崩光电二极管”检波器与二维CCD 图像敏感器,相对距离由测量发射信号与雪崩光电二极管接收到的反射信号之间的相位差获得;视场半锥角为3°,可测量距离为0.3m~660m。在电子器件内,方向(视线角)的测量是通过CCD 相机采集的反射器图像进行图像识别处理获得的;视场半锥角为4°,测角距离也是0.3m~660m。
(3)反射器。反射器由两个单元组成。其中一个用于长距离测量,由24个角立方体反射器组成,其一边长5cm;另一个用于短距离测量,它有1个边长为2cm 的角立方体反射器。
2.4.2.3 邻近敏感器
邻近敏感器(图8)是在距离2m 至对接之间使用的导航敏感器。它使用100个红色二极管照射安装在目标星上的标记,并由CCD 相机获取标记的图像。该标记由若干个反射器组成固定的形状,按标记反射器图像之间的距离与位置,测量追踪星和目标星之间的相对位置和姿态。

图8 ETS-VII邻近敏感器[14]Fig.8 Proximity sensor of ETS-VII
2.4.3 飞行试验
在交会对接飞行试验中,较小质量的子星先从主星分离出,主星作为试验追踪星,而子星作为合作目标星。试验中:①子星保持姿态稳定;②主星与子星之间有直接通信链路;③子星可反射来自追踪星的信号;④子星装有邻近敏感器标记;⑤子星上装配对接机构捕获把手与视觉标记。试验进行了3次(参见表1),前2次为V-bar逼近,第3次为R-bar逼近。
2.4.3.1 第1次试验
第1次飞行试验于1998年7月7日成功完成。从两星分离到对接,借助TDRS 通信链路运作约40min。试验序列如下:①首先,地面支持人员从筑波空间中心向追踪星发送分离指令,追踪星将目标星推出并以1.8cm/s低速离开。②追踪星开始自动控制相对位置与姿态,直到相对距离达2m 的近区点(2m 保持点)。③使用邻近敏感器导航和相对6自由度控制,两颗卫星保持2m 距离(误差几厘米)继续编队飞行15min。④然后,地面支持人员向追踪星发送逼近指令,追踪星开始以1cm/s的低速逼近目标星,并在接触前用掣爪系统抓取目标星的把手。⑤最后,追踪星与目标星完全对接。
2.4.3.2 第2次试验
第2次飞行试验于8月7日开始。追踪星与目标星分离后,按计划执行到达525m 保持点,开始V-bar逼近飞行。然而,在V-bar逼近中出现推力器非正常点火,导致姿态偏离,这样,追踪星由星上安全性管理功能自动执行“禁行中止”,并飞行到后撤点(目标星前方2.5km)。从8月8日到8月13日,进行了2次最终逼近尝试;然而,因姿态偏离,追踪星再次转向安全性模式。通过修改交会飞行软件和逼近方法,最终,在8月27日自主完成交会对接。这样,从分离到完成对接,原计划约4h,实际经历了3周才完成。
2.4.3.3 第3次试验
在第3次飞行试验中,因追踪星与目标星之间相对位置关系的变化,“追踪星-目标星”通信链路天线按指令转换,输出功率也随分开距离按指令改变。距离测定应用导航敏感器,即相对GPS,激光交会雷达,以及邻近敏感器。当相距600m 至9km时,由GPS接收机测量。追踪星与目标星都装备GPS接收机,目标星GPS接收机的数据按“追踪星-目标星”通信链路向追踪星传输,然后,追踪星GPS接收机计算其相对目标星的位置与速度。
2.4.3.4 飞行结果评估
在原来的试验计划里,无人交会对接需要的设备、GNC功能和操作技术,将通过6次飞行试验得到证实。然而,事实上,只进行了前述3次飞行试验。主要项目基本已在第2次试验中得到验证,其余项目都在第3次飞行试验中得到了验证。下面着重讨论前两次试验中每个阶段GNC的性能。
(1)精确分离。对接机构作出精确分离是非常重要的,因为邻近敏感器需要保持目标星的标记在其视场内,以便于分离后的测量。
(2)弱冲击对接。追踪星以1cm/s的低速逼近,并以对接机构掣爪系统捕获目标星的捕获把手(图6),捕获时的位置精度约为1cm。
(3)相对6自由度控制和邻近敏感器导航。在对接逼近阶段,使用邻近敏感器导航执行相对6自由度控制。要求的位置控制精度在10cm 以内,而实际控制误差大约2cm;要求的姿态控制精度是2°,而实际每轴控制误差在0.5°以内。导航敏感器根据CCD 获取的反射标记图像的位置,计算追踪星对目标星的相对位置和姿态。在轨测量值和地面测试值相差小于1mm。相对位置和相对姿态的随机误差分别在0.2mm 和0.1°之内,均分别优于距离(X轴)20mm 和姿态0.8°的要求值。
(4)参考轨迹制导和激光交会雷达导航。在最终逼近段,追踪星基于激光交会雷达导航,按参考轨迹制导律,沿V-bar逼近目标星。位置/速度指令与导航值之间的区别微乎其微(参见图9)。可以证实,参考轨迹制导的性能与导航的性能一样好。激光雷达应用三维位置敏感器,采用二维CCD 静态头代替机械扫描头。相对距离的测量,应用比较发射波束和返回波束的相位的方法;而视线角测量应用CCD 摄取的三面直角棱镜反射器图像。在目标星和追踪星联接后,通过与最后的地面测试的测量数据比较,对在轨激光交会雷达精度进行了评估。对测距量,在轨的测量值和地面试验值相差在2cm内,优于所要求的10cm;对视线角,在轨与地面的测量误差大约0.1°,也满足所要求的精度。随机误差也低于要求值。
(5)C-W 制导和GPS 相对导航。在相对逼近段,追踪星按Clohessy-Wiltshire(C-W)制导律逼近,该制导律使用Hill方程的C-W 解。轨道机动指令(要求的速度增量ΔV)由制导律计算,并且“速度增量关断”应用加速度计测量执行。图10显示应用C-W 制导从1 100m 点至150m 点的轨 迹,途中轨迹是由GPS相对导航估计的。实际射入精度约为20m,而要求的是在80m 内。GPS相对导航在Hill坐标系估计相对位置和速率。追踪星GPS接收机执行GPS相对导航。两颗卫星都有GPS接收机,追踪星GPS接收机处理两颗卫星的伪距差和位移变化数据作为测量数据,并使用扩展卡尔曼滤波器估计相对位置和速度。比较作为参考的激光交会雷达测量粗数据,评估了在轨GPS 相对导航的精度。GPS和激光交会雷达的距离数据对应得很好,二者之间的差别仅几米。在联接飞行期间的GPS相对导航的精度也作了评估。追踪星GPS接收机与目标星GPS接收机的天线之间的距离是预知的。位置估计的精度在10m 内,而要求量为26m。

图9 ETS-VII参考轨迹制导下V-bar逼近期间的位置[8]Fig.9 ETS-VII position during V-bar approach by reference trajectory guidance

图10 ETS-VII C-W 制导下的150m 射入轨迹[8]Fig.10 ETS-VII trajectory of 150minjection by C-W guidance
(6)自主飞行管理。除GNC功能外,交会对接系统具有飞行管理功能,它由模式/序列控制、组件冗余管理和安全性管理组成。安全性管理尤为重要,这是因为交会对接技术将在HTV 上得到应用。飞行管理由安装在制导与控制计算机上的交会飞行软件运作。该软件监测并检查卫星的姿态、通信链路以及组件的自检状态等。如果探测到一个组件发生故障,该软件将故障组件替换为备份组件。此外,在离目标星30m 内或“禁行中止”30m 处,如果一个冗余组件的连续故障被探测到,该软件将自动执行“避撞机动”。在头两次飞行中,该软件的模式/序列控制运作良好。例如,该软件判断了激光交会雷达捕获,并且将其飞行模式从相对逼近模式变换为Vbar逼近模式。在第2次飞行中,当V-bar逼近发生姿态异常时,该软件探测到了该故障,并解锁各自的激光交会雷达。这样,该软件将飞行模式变为安全性模式,自动执行“禁行中止”,避免两颗卫星碰撞,保证飞行安全。两次试验飞行证实了自主飞行管理按所设计的运作,包括模式/序列控制和安全性管理。
2.5 ETS-VII自动机技术[6-7,9,12]
2.5.1 试验项目
ETS-VII的空间自动机试验,是为了研发可从地面站遥控操作的不载人卫星上的空间自动机。ETS-VII成功进行了下列试验:①在延时与有限通信能力环境下的遥控操作试验;②卫星姿态与自动臂的联动控制试验,以克服来自自动臂的反作用,稳定卫星姿态;③在轨卫星服务试验,如星上设备的检查与处置,燃料供应,空间结构展开;④目标星的捕获与停靠试验。此外,还进行了下列由日本国家实验室提出的试验:①日本国际贸易与工业部的先进自动机手试验;②日本通信研究实验室的天线装配试验;③日本国家航空航天实验室的桁架结构远距离操作试验。
2.5.2系统组成
ETS-VII自动机系统包括自动臂、端点作用器、监测相机,手眼相机,图像处理器、运动控制器、关节驱动器等。自动臂有6 自由度,质量约150kg。自动臂包含6个关节,关节质量相对较小,每个几千克。自动臂及其试验有效载荷安装在追踪星上(参见图11)。星上自动臂的遥控操作以两种方式进行:①控制模式;②遥操作模式。在控制模式,从地面控制站向星上自动臂的指示按任务级指令发送,如“从A向B以速度C 带有效载荷D 移动”。星上自动机控制计算机解码这些指令,生成自动臂轨迹,控制自动臂,以实现所指示的自动臂运动。在遥操作模式,地面操作者应用控制把手导引自动臂运动。传向星上自动臂的指示,每250ms给出自动臂末端位置与姿态。星上自动臂控制计算机,从这些数据生成自动臂的轨迹,并按指示控制自动臂。
2.5.3 捕获与停靠试验追踪星自动臂捕获并收回目标星是ETS-VII使命的引人注目的焦点。捕获试验装置由追踪星上的自动臂端点作用器与目标星上的固定器组成(见图12与图13)。端点作用器顶部有“手指”,用以抓取目标星上的固定器把手。固定器上的光学标记由一块黑色矩形板上的2个白色圆盘组成。对于目标星捕获(不是对接),在追踪星相对目标星保持邻近飞行时,应控制追踪星上的自动臂,跟踪并抓取装配在目标星上的固定器。自动臂对“抓取点”的视觉伺服跟踪是捕获目标星的关键技术之一。这次技术试验成功应用了一组装在操作器手上的CCD 相机与目标星固定器的光学标记,以及星上实时视频信号处理。
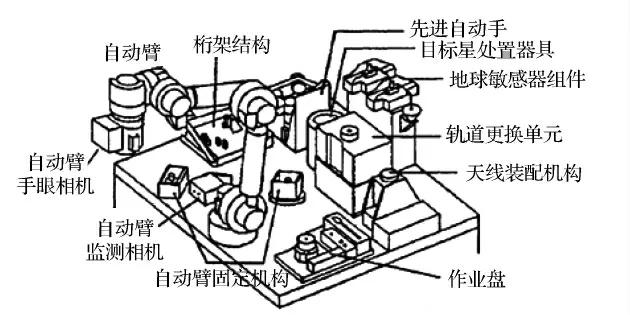
图11 ETS-VII追踪星自动机设备面板外形[7]Fig.11 Outlook of ETS-VII chaser's RBT-panel
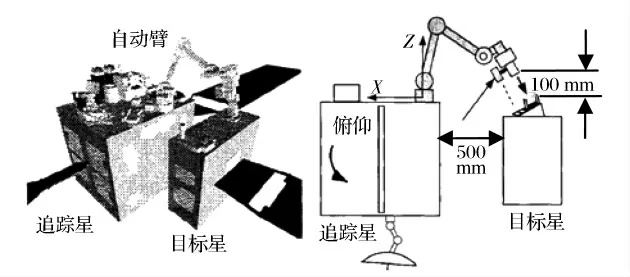
图12 ETS-VII追踪星捕获目标星[7,9]Fig.12 ETS-VII chaser captures target
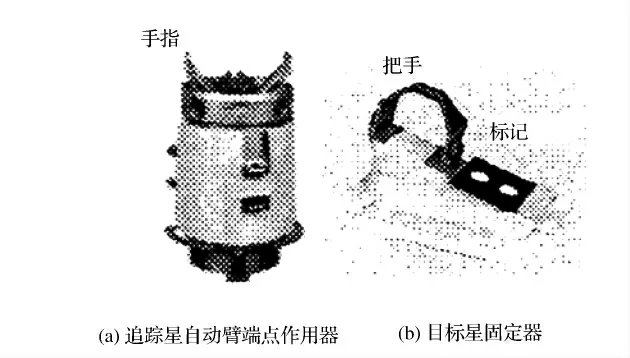

图13 ETS-VII追踪星端点作用器和目标星固定器[12]Fig.13 ETS-VII chaser end-effector and target fixture
由CCD 相机获得的视频图像经处理后可提取光学标记圆盘的位置、尺寸与比率,这样可估计圆盘在端点作用器坐标系中的相对距离x,y,z,以及俯仰角与滚转角。视觉伺服跟踪控制插图参见图14。如图14所示,端点作用器位置与指向运动的修正指令ΔXcmd由端点作用器路径规划向自动臂运动控制器发送。该控制器进行逆向运动学运算,将自动手运动指令(ΔXcmd)转化为自动臂关节运动指令(ΔΦ),并将ΔΦ 发送给关节驱动器。

图14 ETS-VII视觉伺服跟踪控制框图[9]Fig.14 Block diagram control of the visual servo-tracking for ETS-VII
虽然ETS-VII没有进行完整的目标星捕获序列试验,但分别进行了停靠与捕获两项主要的子序列试验。1999年3月,子星被自动臂从储存位置(即对接位置)提出并抓住,然后又移回到对接口(停靠运作)。1999年9月,子星被释放进入受半开口的对接机构约束的自由空间,然后,在视觉伺服跟踪下被自动臂成功地收回(捕获运作)。
追踪星自动臂捕获目标星的过程可分为两段:①初始逼近;②最后逼近。最后逼近应用视觉伺服跟踪;而初始逼近是将追踪星操作器手移至目标星附近点,从那里开始最后逼近。在自动跟踪锁定之前的交会逼近途中,自动臂应停在一个等待位置(图12),这个位置离捕获位置有一定的安全距离(如500mm),以避免与目标星意外碰撞。在这个距离,追踪星可进行稳定的并行飞行。在这个等待位置,目标星的光学标记对于精确的图像处理也许太远,甚至在CCD 相机视场之外。因此,需要将操作器手移至光学标记的附近点(如100mm),从那点开始视觉伺服跟踪。由进入等待位置直至到达伺服跟踪起点即为初始逼近段,在这一段,追踪星姿态由反作用轮控制。然后,操作器控制转换为应用视觉伺服跟踪的最后逼近。在最后逼近段,为了避免推力器或反作用轮引发意外的姿态运动,追踪星姿态控制系统将关断,进入自由漂移状态。
由上述分析可见,成功执行交会捕获与停靠的关键条件是:①应用相对GPS、激光交会雷达、邻近敏感器的自主交会控制;②目标星姿态稳定并装配带有光学标记的固定器;③应用自动手视觉伺服跟踪技术与自动臂控制技术。
2.6 ETS-VII小结
ETS-VII是成功执行两个无人航天器之间的交会对接,通过ETS-VII研发的自主交会对接技术(V-bar逼近与R-bar逼近)直接在HTV 飞行使命中得到应用。此外,ETS-VII的交会对接与空间自动机技术试验,对以后的卫星在轨服务技术的发展具有重要价值。
3 H-II转移飞行器(HTV)
3.1 HTV概述[17-19]
HTV是日本向ISS运送物资的不载人货物转移飞船,别名为“白鹳”(Kounotori;White Stork)。HTV-1为技术验证飞行器,于2009年9月11日从种子岛空间中心,由运载火箭H-IIB TF#1发射升空。H-IIB是H-II运载火箭系列的最新型号,且被升级专门用来发射HTV。这是H-IIB 及HTV 的首次飞行。在与H-IIB分离后,HTV 使用自己的制导与导航系统,在GPS支持下,朝ISS运动并在之后与ISS相距10m 几乎没有相对运动的位置上定位。SSRMS捕获HTV 并将其停靠在ISS节点2号舱的天底侧。9月17日,HTV-1完成在ISS的停靠。当HTV 在ISS停靠时,ISS乘员进入HTV的加压货舱,向ISS 转移舱内补给品。与此同时,ISS乘员也使用空间站的自动臂与希望号(Kibo)舱的自动臂卸载不加压货物。补给品卸完后,空间站的垃圾和其他废弃物被装进HTV。2009年11月2日,HTV-1解除停靠离开ISS后,降轨并执行毁坏性再入,圆满完成技术验证与运送物资双重任务。HTV-1飞行使命的基本目标为:①执行日本在ISS规划中的任务;②验证日本空间工程技术;③积累日本自主研发的载人航天器系统技术与经验。HTV-1是日本在自己研制的运载火箭、卫星通信系统和载人航天系统集成技术基础上建造的。
HTV-2于2011年1月22日发射,1月28日停靠在ISS和谐号舱天底一侧的对接口上(参见本期封 二),3月28日解除停靠,3月30日再入地球大气。HTV-2是HTV-1 的改进型,货运能力由HTV-1的4.5t增加至5.3t。
目前,俄罗斯的进步号货运飞船,欧洲航天局的“自动转移飞行器”(ATV)和美国的航天飞机都向ISS运送补给物品。但除航天飞机外,仅有HTV可大规模同时运送加压与不加压货物。表3对ISS补给飞行器(HTV,ATV,进步号,航天飞机)作出比较,表4列出HTV 主要技术指标。
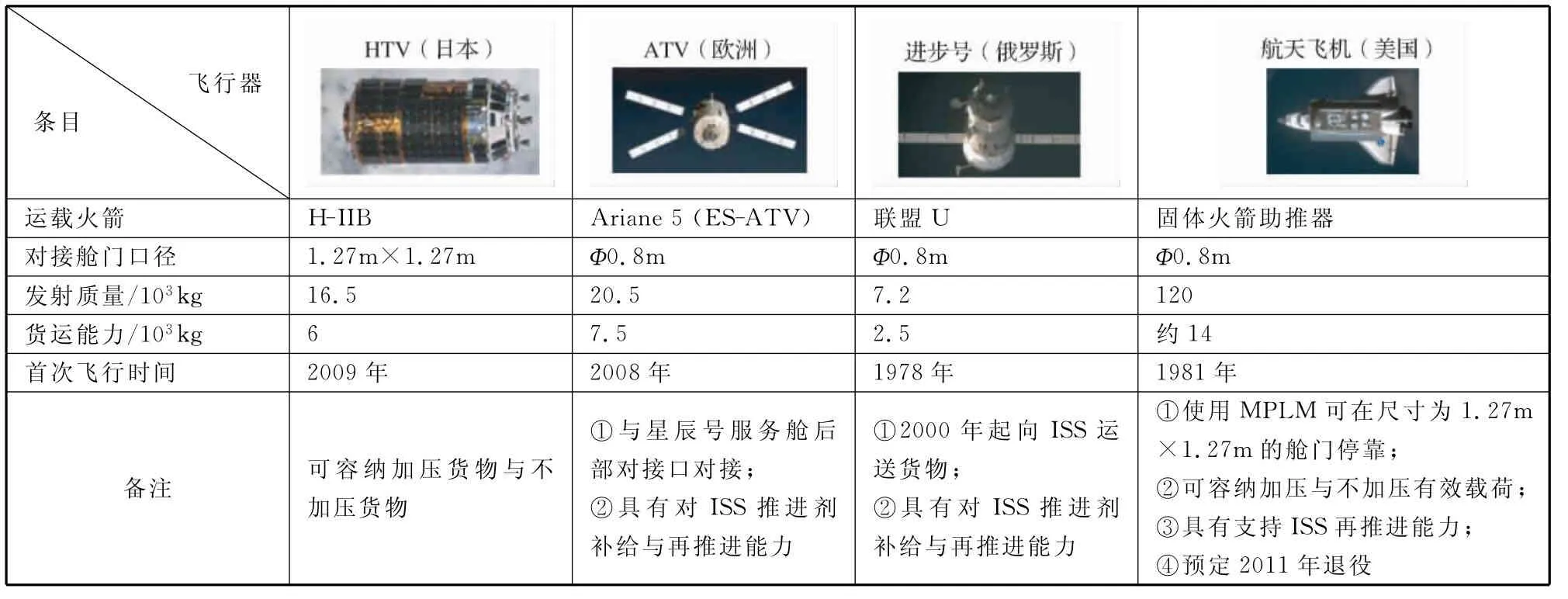
表3 ISS补给飞行器比较[19]Table3 Comparison of ISS re-supplyvehicles

表4 HTV技术指标[19-20]Table4 HTV specifications
3.2 HTV 构型与系统组成[17-22]
HTV 的构型与组成如图15所示。HTV 由HTV 货运系统与HTV 平台系统两部分组成。货运系统包括加压货舱与不加压货舱及外露货盘;平台系统包括电子设备舱与推进舱(图16)。太阳电池板共57块,安装在四个舱段的圆柱型与圆锥形基础结构上。HTV 长约10m,直径约4.4m,总重16.5t,共载有6t货物,其中4.5t货物装载在加压货舱内(这些货物将转移进ISS舱内,虽然有的货物并不必须要“加压”),1.5t不加压货物装载在不加压货舱中的外露货盘上(图15)。
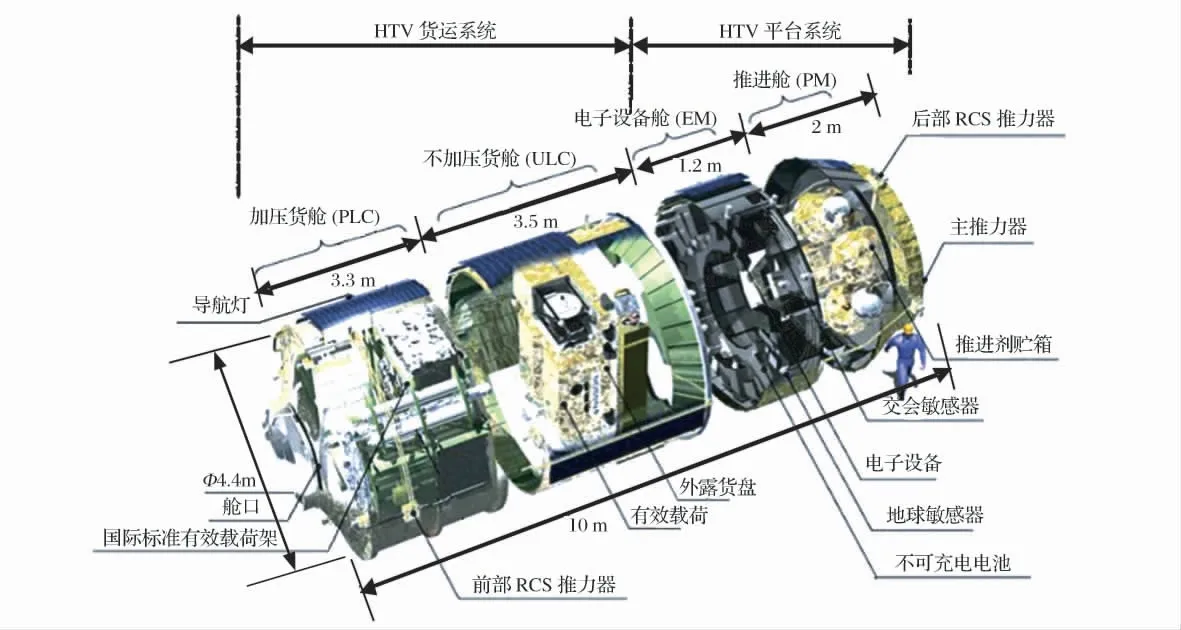
图15 HTV 构型[21-22]Fig.15 HTV system overview
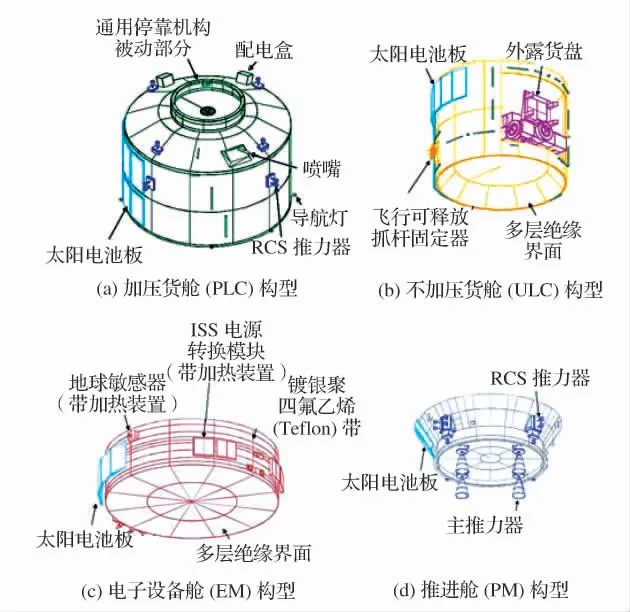
图16 HTV 各舱段构形图[22]Fig.16 Overview of HTV PLC,ULC,EM and PM
3.2.1 加压货舱
加压货舱(图16(a))装载ISS 舱内所需物资(试验台,食品与饮用水及衣物等),内部气压保持在一个大气压。在HTV 单独飞行阶段与停靠阶段,HTV 内部温度受到控制。加压货舱前部装备通用停靠机构被动部分,用于与ISS和谐号舱(即节点2号)上通用停靠机构主动部分对接。HTV 停靠在ISS后,加压货舱与和谐号舱之间的内部空气经由舱内通风系统循环;ISS乘员进入加压货舱,卸下货物转移包与科学/系统机柜。在货物转移完成后,HTV 将装入垃圾与用过的材料。加压货舱分系统包括电源系统,热控系统,环境控制系统,乘员支持系统,以及导航灯。导航灯包括2台捕获灯(1台白灯与1台黄灯,位于端锥环上)与4台姿态灯(2台红灯在左侧,2台绿灯在右侧)。当HTV 逼近或离开ISS时,ISS乘员应用导航灯确认HTV 的位置与姿态。捕获灯是闪光灯,当HTV 逼近ISS,离ISS 1 000m时,ISS 乘员可看见捕获灯。当HTV 逼近ISS相距500m时,姿态灯对ISS乘员是可见的;通过监测姿态灯,ISS乘员可确认HTV 的近似姿态。
加压货舱基本结构的设计借鉴了JEM 实验后勤舱加压部分,并作了修改。图16(a)描绘了加压货舱底部基本结构,压力圆顶结构的球形表面覆盖了整个底部半径范围。在圆顶帽中心有一个洞,以便制造时安装用具与技术人员进入。加压货舱装有通风风扇及其管道、用于火警的烟探测器、普通照明设备、用以支撑空气管道室与照明设备的框架结构,并为舱内国际标准有效载荷机柜的迁移与安装提供支轴枢架的支撑点。此外,它还提供HTV 再补给货架,装载加压货物。再补给货架由金属(铝)刚性箱架结构与安有货物围栏的前面板组成。所有的货物都用带子扎紧在搁板或前面板上。再补给货架在加压货舱上的附着机构,是与国际标准有效载荷机柜兼容的。
3.2.2 不加压货舱与外露货盘
在HTV 飞向ISS 过程中,不加压货舱为外露货盘提供容纳空间(图16(b))。在不加压货舱面向地球的表面有一个2.7m×2.5m 的开口,外露货盘通过这个开口进出。外露货盘装载在ISS外表面应用的外露实验设备及/或轨道更换单元,最多可装载1 500kg货物。
在HTV 停靠ISS后,外露货盘将被SSRMS从不加压货舱转移,之后,货盘将被交接给希望号舱的自动臂,即日本实验舱遥操作器系统(JEM Remote Manipulator System,JEMRMS),暂时附着于ISS移动基座系统或希望号的外露设施上,卸载HTV运载的有效载荷。卸下有效载荷并转移到ISS 上后,货盘将装载用过的有效载荷,由空间站自动臂装回不加压货舱中。
外露货盘有三种构型(图17),第1种构型用于装载在希望号外露设施上运作的外部实验设备。第2种构型装载用于ISS通用的轨道更换单元,如蓄电池。第3种构型为多用途货盘,可同时载运外部实验设备与轨道更换单元。这种货盘既可连在希望号外露设施上,也可连在空间站移动基座系统上。

图17 HTV 外露货盘[19-20]Fig.17 HTV exposed pallet
外露货盘包括HTV 货物固位机构,HTV 连接器分离机构,以及抓杆固定器。这些机构将确保外部货物运送安全。外露货盘上装备的抓杆固定器是SSRMS或JEHRMS 抓取与固定的机构[3]。抓杆固定器有两种类型:①飞行可释放抓杆固定器,这是ISS通用的抓杆固定器;②电源与视频抓杆固定器,它可经由SSRMS 或有效载荷/轨道更换单元接纳设备,支持货盘与ISS之间的数据通信;也可从ISS向日本实验舱外露设施的有效载荷或轨道更换单元提供加热器电能。第2种货盘将附着在空间站移动基座系统的有效载荷/轨道更换单元接纳设备上。外露货盘通过HTV 不加压货舱从HTV 电子设备舱接入50V 直流电。当HTV 停靠ISS时,货盘从ISS接入120V 直流电。在货盘被卸走并从希望号舱的外露设施上离开后,没有电能供给货盘。
不加压货舱包括束缚分离机构,固定机构,保护带分离机构,以及导轨/轮子。不加压货舱上装备飞行可释放抓杆固定器(图18),空间站自动臂抓取不加压货舱上的抓杆固定器,将HTV 向ISS停靠。
3.2.3 电子设备舱
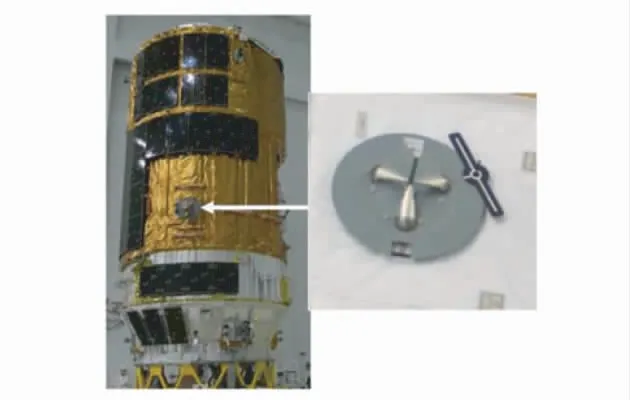
图18 HTV 飞行可释放抓杆固定器[19]Fig.18 HTV flight releasable grapple fixture
电子设备舱(图16(c))包含制导、导航与控制,通信,数据处理,电源等系统的设备。这些系统支持HTV 的自主交会飞行与/或遥控交会飞行。电子设备舱将太阳阵电能或蓄电池能量分配给HTV 的每个组件。电子设备舱接收从地面或ISS 经由TDRS发送的指令,并将这些指令转送向每个部件;它也向地面或ISS发送HTV 的遥测数据。
3.2.4 推进舱
推进舱(图16(d))由推进剂贮箱,管道,阀门,主推力器与部分姿控推力器,以及敏感器等组成。贮箱中的推进剂用于交会,姿态控制以及降轨推进。表4含推进系统主要技术指标。推进舱有4个推进剂贮箱,每次飞行的推进剂容量为2t(最大值2.4t)。一甲基肼(Monomethyl Hydrazine,MMH)为燃烧剂,混合氮氧化物MON3为氧化剂。除了4个推进剂贮箱外,推进舱还有4个装有氦气的小贮箱,用于给推进剂贮箱增压。HTV 推进系统应用冗余设计,有4个主推力器及28个反作用控制系统(RCS)推力器。28个反作用控制系统(RCS)推力器中,16个安装在推进舱外壁上,12个安装在加压货舱的外壁上(图19)。每个主推力器的推力为490N,每个RCS推力器的推力为110N。用于轨道机动(调相机动与交会机动)的推进由电子设备舱发送的信号控制。
3.3 HTV 通信与飞行控制[18-20,23-24]
在与H-IIB 运载火箭分离后,HTV 将自动激活HTV 各分系统,稳定姿态,并对HTV 部件进行自检。然后,HTV 将与TDRS建立通信并启动与HTV 使命控制室通信。使命控制室位于筑波空间中心的空间站运作设施内。一旦HTV 与使命控制室之间的通信建立起来,使命控制室将实施HTV飞行控制,监视HTV 的遥测参数与飞行数据,并发送指令控制HTV分系统及对飞行实施机动。从HTV到达逼近起始(Approach Initiation,AI)点前的90min内,使命控制室和美国休斯顿使命控制中心合作对HTV 使命实施运作控制。HTV 飞行运作程序如图20所示。
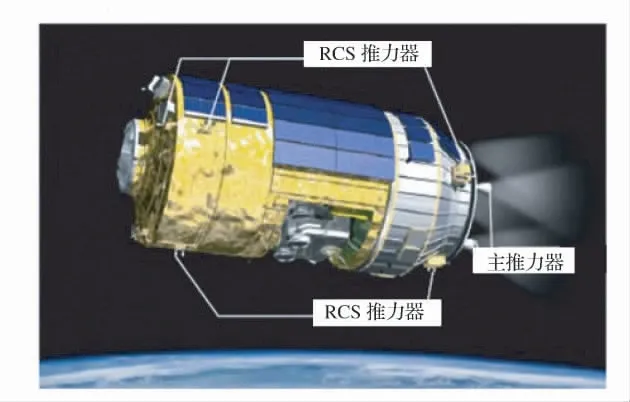
图19 HTV 主推力器与RCS推力器布局[20]Fig.19 HTV main thrusters and RCS thrusters
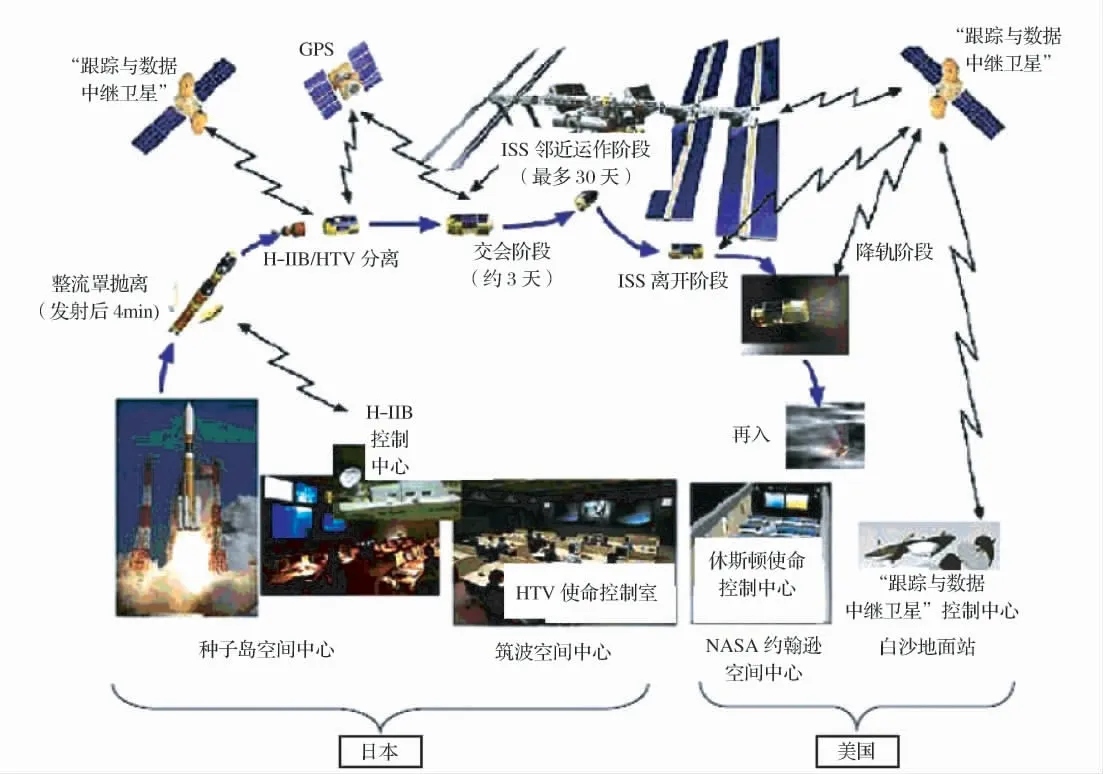
图20 HTV 飞行运作程序[19]Fig.20 HTV flight operation procedure
3.3.1 HTV 通信链路
当HTV 向ISS 逼近与对接时,HTV 应用两个通信链路:①HTV/ISS通信链路,由HTV 的邻近链路系统(PLS)与ISS的邻近通信系统(PROX)构成;②HTV/TDRS通信链路,由HTV 的轨内链路系统(IOS)与TDRS构成。HTV 的邻近链路系统天线朝向日本实验舱的邻近通信系统天线;HTV的轨内链路系统天线朝向TDRS(图21)。对HTV通信,ISS结构可能成为障碍物(ISS的太阳电池翼与散热器的尺寸达100m 量级),且遮断HTV 视线,来自ISS结构的多路干扰可能对实际通信构成严重冲击。因此为实现使命成功,需确保通信系统高度安全。
图21表示ISS日本实验舱(JEM)和HTV 上的天线的位置。ISS邻近通信系统后部天线用于邻近通信的逼近轨迹,邻近通信系统上部和前部天线用于逃离轨迹与返回轨迹。所有ISS邻近通信系统天线为(微带)贴片天线。HTV 邻近链路系统天底天线(PLS-N)为贴片天线,而邻近链路系统天顶天线(PLS-Z)为螺旋天线;轨内链路系统天底天线(IOS-N)与天顶天线(IOS-Z)均为螺旋天线。安装在JEM 上的邻近通信系统天线辐射图将受ISS太阳翼与散热器的多重影响。在关键阶段,如向ISS对接与从ISS分离,要求通信系统具有高度安全性与HTV 至ISS的可见性。为此,在邻近通信区,经由“跟踪与数据中继卫星”在地面站与HTV 之间建立遥测与遥控通道作为备份系统应用。

图21 日本实验舱PROX 天线与HTV PLS及IOS天线示意图[23]Fig.21 JEM PROX antenna and HTV PLS/IOS antenna
HTV 轨迹受GNC系统控制。在邻近通信区域内,从高度调整机动2至对接后的分离,对HTV施加机动。从高度调整机动2(位于ISS 后面约10km 处),经由逼近起始点(位于V-bar上ISS之后5km 处)进入R-bar射入点(位于R-bar上ISS之下500m),沿R-bar向ISS逼近。HTV 邻近通信将被用作为从高度调整机动2至对接之间的指令与遥测的传送。(详细描述参见3.6节。)
3.3.2 HTV GNC系统
GNC系统性能是成功进行自主交会与自动捕获的关键因素。GNC系统的中央处理单元是制导与控制计算机。
3.3.2.1 GNC系统功能
HTV GNC系统的主要功能是控制HTV 姿态与轨道:①在HTV 与运载火箭分离后,保持并控制HTV 的姿态;②引导HTV 安全进入ISS邻近区,并最终达到捕获点。此外,HTV GNC 控制HTV离开ISS后的降轨与再入序列。
GNC系统的另一个重要功能是“故障检测、隔离与恢复”(Failure Detection,Isolation and Recovery,FDIR)。作为ISS的来访飞行器,要求HTV“1次故障保任务”,“2次故障保安全”。这意味着:①使命目的(即向ISS提供补给和分离后的废弃物处置)即使在1次故障后也可实现;②ISS的安全性要求(即避免碰撞ISS)即使在2次故障后也可达到。为满足此要求,HTV GNC系统应用冗余技术,并具有中止使命的控制能力。
3.3.2.2 GNC系统组成
HTV GNC系统包括:①制导与控制计算机;②姿态导航与位置导航敏感器;③加速度计;④中止控制单元;⑤阀门驱动电子设备。制导与控制计算机由中央处理器与输入/输出控制器组成,加载交会飞行软件。HTV GNC 从多种敏感器收集导航数据,确定HTV 的时间、位置、速度、姿态和姿态速率,并通过阀门驱动电子设备控制推力器,保持合适的姿态与轨迹。中止控制单元是在制导与控制计算机失效情况下提供使命中止与安全性能力的处理单元。
对于姿态和姿态率确定,地球敏感器组件提供滚转角和俯仰角,空间集成GPS与惯性导航系统提供3轴姿态率。它由陀螺仪、加速度计和GPS接收机组成。对于时间、位置和速度的确定,该系统除提供3轴加速度测量资料外,还提供可独立应用的GPS导航解、伪距、伪距速率,以及接收机状态。在最终逼近段,相对ISS的距离不足500m,需要更精确的导航,以满足ISS安全性和捕获要求,因此,HTV使用交会敏感器测定相对ISS的位置和速度。交会敏感器提供相对于激光雷达反射器的激光测距和视线角测量资料。激光雷达反射器是安装在JEM 天底侧的折回反光镜。给出上述导航数据后,制导与控制计算机通过激发阀门驱动电子设备调节发动机推力,以控制HTV的姿态和轨迹。
3.3.2.3 GNC冗余技术
为满足“1次故障保任务”与“2次故障保安全”要求,GNC系统应用冗余技术。
(1)姿态导航敏感器由3个陀螺仪和2个地球敏感器组件组成。HTV 姿态估计基于轨道陀螺罗盘指向方法。即使在任意2个姿态敏感器出现故障情况下,在恢复动作启动前,HTV 也可以维持姿态导航。
(2)位置导航敏感器由2台GPS接收机或2个交会敏感器组成。在它们的一次故障情况下,HTV可继续朝向使命目标运作。安全性功能通过严格的故障检测方法强化,即操作控制将使用有别于GNC的故障检测功能检测异常情况,以满足2次故障保安全的要求。GPS 和交会敏感器导航以及相关的安全功能是交会关键技术。
(3)在机动期间使用的加速度测量装置由3个加速度计组成,每个轴上安装一个,这意味着从安全性观点看2个加速度计失效可被接受。
(4)制导与控制计算机由2个与阀门驱动电子设备链接的输入/输出控制器和3个中央处理单元组成。万一控制器或推进系统出现故障,主控制器和主推进系统将被切换至备用件。
(5)为了在1个中央处理单元发生故障时,应用剩余的两个继续使命运作,内置交会飞行软件可实现3∶2表决系统。万一2个中央处理单元发生故障,控制授权将转交给输入/输出控制器。制导与控制计算机附有中止控制单元,在输入/输出控制器或推进系统多重故障情况下,中止控制单元是最后一个执行使命中止(HTV从交会轨迹逃离)的器件。
图22表示HTV GNC系统以及与其他分系统的接口关系。由图可见GNC系统及相关非GNC系统均采用冗余技术,为可靠性与安全性提供基本保障。

图22 HTV GNC系统框图[24]Fig.22 HTV GNC system diagram
3.3.3 ISS配套设备
3.3.3.1 激光雷达反射器
激光雷达反射器位于希望号加压舱的天底一侧(图23)。当HTV 从ISS天底一侧逼近时,激光雷达反射器将反射HTV 交会敏感器发出的光束。
3.3.3.2 邻近通信系统

图23 激光雷达反射器 [19]Fig.23 Laser radar reflector
HTV 进入邻近通信范围后,可与ISS 直接通信。JEM 邻近通信系统由天线、GPS天线、通信设备、GPS设备、数据处理设备、硬件指令面板组成(图24)。邻近通信系统设备都安装在希望号加压舱的轨道内通信系统机柜内,通信设备安装在机柜右侧。硬件指令面板原在命运号(Destiny)实验舱的空间站自动臂工作站临时展开;当宁静号(Tranquility)(节点3)到达ISS后,硬件指令面板在宁静号的穹顶号(Cupola)舱中展开。在HTV 最终逼近ISS或离开ISS期间,除了使用指令/监视笔记本电脑外,ISS乘员也可以为即时的临界操作使用硬件指令面板控制HTV。硬件指令面板的主要指令键是:①中止,该指令迫使HTV 离开ISS;②抓杆固定器脱离,该指令迫使HTV 与SSRMS分开,即在SSRMS无法脱开装在不加压货舱上抓杆固定器的情况下,抓杆固定器将从不加压货舱脱离;③后撤,该指令迫使HTV 后撤到ISS 之下30m 或100m;④保持,该指令迫使HTV 暂停逼近,保持相对距离不变;⑤自由漂移,该指令关断HTV 推力器,为使SSRMS 抓取HTV。邻近通信系统天线位于希望号加压舱的外壁侧,支持邻近运作期间HTV 与ISS 之间的直接射频通信。它接收来自HTV 的遥测数据,也用于向HTV 转发来自地面或ISS的指令。GPS天线安装在希望号实验后勤舱加压段的顶端,用于向HTV 提供ISS的轨道位置和速度。
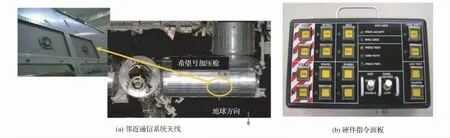
图24 邻近通信系统部分设备[19]Fig.24 Some equipment of PROX
3.4 HTV 自主交会技术[18,25]
HTV 自主交会飞行可划分为两个阶段,即相对逼近段与最终逼近段。相对逼近从V-bar上的逼近起始点至R-bar上的最终逼近进入点,最终逼近从R-bar逼近进入点至捕获点。
3.4.1 相对逼近技术
逼近轨迹及相关FDIR 的设计须考虑安全性要求,即确保不侵犯ISS的安全性区域。为满足这项要求应识别并选择包含在验证中的故障效应(这些故障将影响漂移轨迹),详尽研究轨迹优化和故障模式(包括轨迹扰动)。此外,一类被称为“安全性网”的FDIR在交会飞行软件中执行。这类FDIR依据安全性区域约束,除检测现时的HTV 相对位置外,还通过显示位置与速度的传播,检测预示的轨迹。这样,若发现安全性区域被侵犯或将被侵犯,可触发“避撞机动”。安全性设计验证可应用蒙特卡罗分析法(考虑可能影响轨迹的故障模式)与软件模拟测试方法。
3.4.1.1 相对逼近要求与设计
在相对逼近阶段,基于相对导航,执行多重机动。轨迹安全性要求如下:①在到达相对逼近起始点之前,HTV 目标轨迹机动与相关的自由漂移轨迹在“逼近椭球”(AE)之外至少24h。②在逼近起始点之后且在“警戒球”(KOS)之外,目标轨迹机动与相关的自由漂移轨迹不与警戒球相交至少4圈轨道。
逼近椭球为4km×2km×2km 的椭球,中心在空间站质心,长轴沿V-bar方向。逼近起始点是穿入逼近椭球的机动的起始点。这个机动施加一次点火,生成弥散轨迹。若逼近起始点设定为飞行器的位置保持点,则逼近椭球进入机动在飞行器进驻逼近起始点后开始。在逼近起始保持点的运作参照了航天飞机“最优化R-bar标的交会”的“TI延迟方案”[25]。对于HTV,逼近起始点位于― V-bar上,离ISS 5km 处(与飞行器速度矢量反向)。
在到达逼近起始点之后,应用警戒球作为另一个安全性区域。警戒球是一个圆球,球心在空间站质心,半径200m,只有通过预定的逼近走廊(图25)才可以进入。
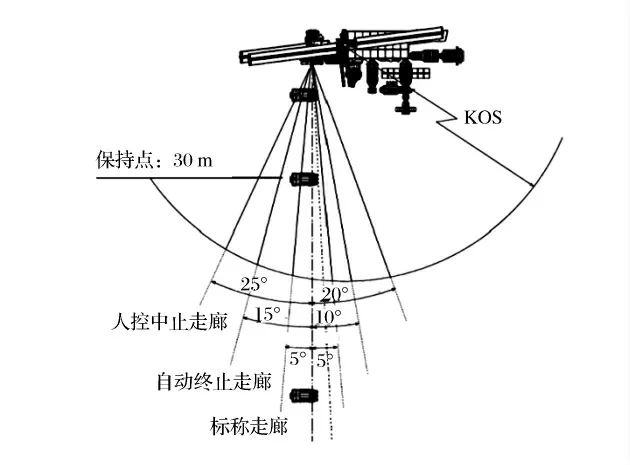
图25 HTV R-bar逼近走廊[18]Fig.25 HTV R-bar approach corridor
3.4.1.2 相对逼近故障检测
轨迹机动中超过或不足的ΔV,可引起与ISS碰撞的风险。在每次机动中,加速度计积分被星上软件用于确定推力切断(熄火)时间。可见,机动精度取决于加速度计的精度。因此,降格的加速度计精度以及降格的相对GPS导航解会导致错误的“瞄准”,可直接引起不足的或非预期的ΔV。RCS推力器的意外的点火也是ΔV 过度或不足的原因。设计HTV 星上FDIR 功能是为了应对上述故障情况,确保满足“1次故障保任务”与“2次故障保安全”的可靠性与安全性要求。如表5所示,敏感器本身的故障可直接被校验敏感器输出数据的FDIR 检测出。推力器故障导致异常姿态或非预期加速度,可被观测姿态状态或加速度积分的FDIR 检测到。HTV星上FDIR 也具有覆盖轨迹异常的功能(即安全性网),这种轨迹异常是由每个FDIR 阈值以下的小的降格潜在引起的。
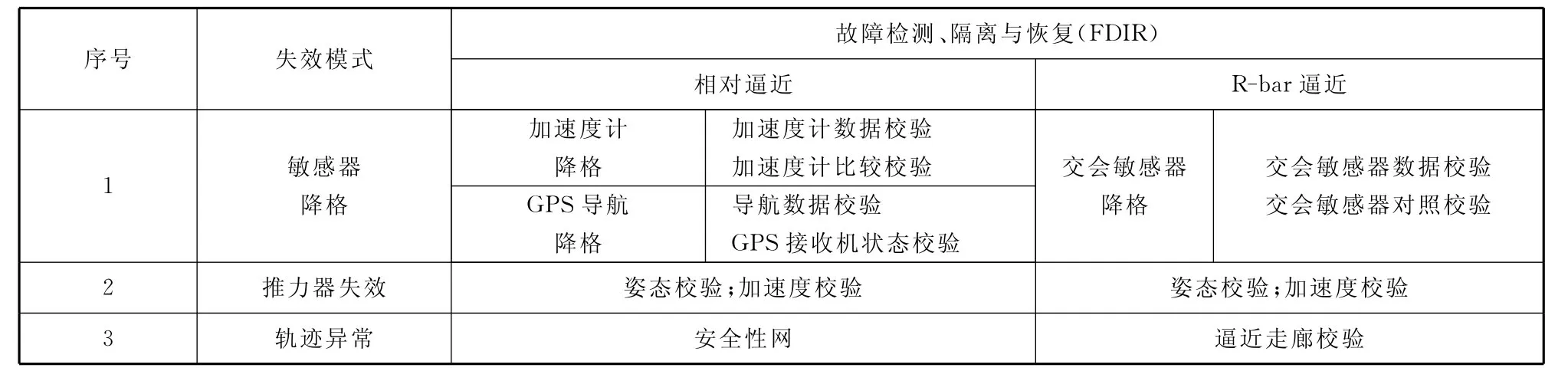
表5 HTV相对逼近与R-bar逼近的故障检测方法[18]Table5 Fault tolerant design for relative approach and R-bar approach
3.4.1.3 相对逼近分析与验证
HTV 逼近轨迹是考虑轨迹安全性而设计的,并应用蒙特卡罗分析法与软件模拟测试进行验证。在蒙特卡罗分析中考虑加速度计与GPS相对导航的精度,以及姿态控制精度。作为标称条件,轨迹安全性和机动后精度被确认满足这些要求。另一方面,基于轨迹安全性要求必须考虑失效后果。关于失效模式有两种情况:①失效模式达到FDIR 阈值;②失效模式虽超出标称指标,但未达到FDIR 阈值。在前一种情况下,失效模式可被观测敏感器数据或姿态的FDIR 检测出,从而进行组件(敏感器或推力器等)切换,切换后交会使命继续进行。对这种情况,导航数据精度或姿态控制精度又被认为与标称条件相同。然而,在后一种情况,需要应用比标称条件更宽的精度作为蒙特卡罗分析的条件。这些条件被“安全性网”FDIR 覆盖,除当前位置外,还将观测传播的轨迹;进而可在预示的安全区域侵犯之前,由“安全性网”触发自动避撞机动,自动执行使命中止。这类FDIR 比其他FDIR 有更宽的覆盖,然而,在阈值设计过程中,应精心评估故障条件和导航精度,以免产生虚警。
3.4.2 HTV R-bar逼近技术
3.4.2.1 R-bar逼近要求与设计
在R-bar逼近阶段,HTV 基于交会敏感器的输出信号逼近ISS。降格控制性能下降引起的轨迹异常,可能导致碰撞ISS的风险。HTV R-bar逼近段轨迹安全性要求如下:①HTV 应在指定的逼近走廊(图25)进入警戒球并逼近ISS;②若HTV 在警戒球之内但在逼近走廊之外时,HTV 应具有自动中止使命的能力;③任何中止应使HTV 在90min内离开逼近椭球,且至少24h内不再进入。
为实现上述轨迹安全性要求,HTV R-bar逼近段设计具有下列特点:①最优化的R-bar逼近制导序列;②考虑交会敏感器导航精度的闭环控制性能;③精准制定的FDIR 阈值参数,当违反走廊时触发使命中止;④依据ISS与HTV 间距离的避撞机动ΔV 管理。
3.4.2.2 R-bar逼近故障检测
在R-bar逼近期间,降格的交会敏感器精度可能导致ΔV 不足或出现意外。推力器的意外点火也是轨迹异常的原因,而HTV 星上FDIR 功能将提供安全性保障功能。3类失效模式及其故障检测方法如下:①敏感器自身失效可被直接校验敏感器输出数据的FDIR 检测出;②推力器失效导致姿态错误或非预期的加速度,因此,可被观察姿态状况或加速度积分的FDIR 检测出;③HTV 星上FDIR 也覆盖轨迹异常,这种轨迹异常可能由ISS邻近区域未知状况引起的(例如,ISS的光学条件可能与预定的光学条件不匹配)。这类称为逼近走廊校验的FDIR,连续监视交会敏感器导航数据与制导指令之间的差异,当差异在其阈值之外时,FDIR 将依据情况尝试将交会敏感器或输入输出控制器/推力器转换到冗余组。当第2次失效被逼近走廊校验发现时,将实施使命中止,以确保ISS安全。
3.4.2.3 R-bar逼近验证与评估
沿R-bar最终逼近要求HTV 仅从预定的逼近走廊进入警戒球。为满足这一要求,与其它阶段轨迹控制所采用的开环机动不同,HTV 在这一阶段的轨迹控制基于闭环原理。由于R-bar逼近应用连续的闭环控制,若用蒙特卡罗型模拟进行分析则缺乏逼真性。因此,对模拟验证,应分析最坏的情况,并应用在初始条件或环境条件中。最坏的情况应涵盖ISS姿态,ISS高度,质量属性,推力器推力状况及其它。
在R-bar逼近的验证中,软件模拟测试应考虑多种飞行方案及环境条件,且动力学闭环测试应用实际飞行硬件(包括制导与控制计算机及嵌入在设备中的导航敏感器),模拟实际平动与转动的动力学运动。
R-bar逼近性能不仅通过软件测试或静力学闭环测试进行验证,还通过动力学闭环测试进行验证。后者是集成动力学闭环测试,以实际的制导与控制计算机/中止控制单元及处于动力学运动的敏感器验证GNC系统性能。日本宇宙航空研究开发机构(JAXA)在筑波空间中心有一套动力学闭环测试设施,包括3个称为姿态控制试验系统的3轴转台及一个称为交会对接运作试验系统的6自由度动力学台。两个试验系统同步,模拟HTV 在逼近ISS 30m 范围内的平移与姿态运动。在动力学闭环测试中,敏感器(两个交会敏感器和一个包含陀螺仪的“空间集成GPS与惯性导航系统”)和制导与控制计算机/中止控制单元集成,以真实的飞行产品成功地获得了数据。
基于交会敏感器导航遥测,确认HTV-1 的在轨飞行轨迹与事先计划的轨迹和验证试验结果相符合。HTV-1在轨演示显示出沿R-bar的“保持”或“后撤”的安全性功能。“保持”或“后撤”由ISS乘员发出指令,HTV 飞行数据证实在轨运作良好,对制导指令的跟踪性能与预期相符,“走廊校检”FDIR阈值设计恰当。
3.4.3 轨迹安全性设计策略
HTV 安全性设计覆盖以下3 方面:①标称轨迹设计;②故障对策;③轨迹异常。
(1)标称轨迹设计。安全性设计首先面临的问题是标称轨迹设计。无疑,标称轨迹设计须考虑正常偏差,包括状态参数的测量偏差与制导机动的执行偏差。这些偏差使无故障的实际轨迹成为以标称轨迹为中心的弥散轨迹。在到达逼近起始点前,弥散轨迹应保持在逼近椭球外至少24h;在到达逼近起始点之后且在未经批准进入警戒球前,弥散轨迹应在警戒球之外至少4圈。考虑到正常轨迹的弥散域,标称轨迹(即所谓“目标轨迹”,)应予以偏置,即采用偏置瞄准方案。
(2)故障对策。对故障情况,安全性设计满足“1次故障保任务”/“2次故障保安全”要求。故障情况涉及两个问题:①FDIR;②已有故障所导致的轨迹异常。部件(或系统)故障包括降阶加速度计,降阶GPS导航,以及推力器故障,检测方法参见表5。
(3)轨迹异常。部件故障可引发状态测量偏差与机动偏差(包括修正前的影响以及修正后的影响),从而导致轨迹异常,危及安全。对轨迹异常,HTV 采用“安全性网”FDIR。“安全性网”的关键是轨迹参数的安全性阈值,而阈值设计须进行轨迹分析,并通过软件模拟测试加以验证。
3.5 HTV捕获/停靠技术[18-19,24,26-27]
HTV 自动捕获运作包括两方面:①SSRMS捕获HTV,并将HTV 停靠在ISS对接口;②HTV 停靠后,SSRMS与JEMRMS联合运作将外露货盘从不加压货舱运出,并停靠在ISS,卸载有效载荷。SSRMS捕获HTV是HTV 交会使命的最关键阶段。由于HTV 运动是相对ISS,因此,ISS的姿态动力学运动是影响HTV 位置保持性能的一个因素。SSRMS对HTV 和ISS 相对运动引发的力学负荷的容限也是一项起主要作用的约束。
为确定自动臂SSRMS 捕获HTV 的条件,引入“捕获箱”概念(图26)。由内到外(从小到大),捕获箱分为3部分:①内捕获箱;②中抓取箱;③总捕获箱。它们分别表示在3个捕获阶段(即位置保持,自由漂移,减速制动)期间,对HTV 的状态要求。

图26 HTV 捕获箱概念 [18]Fig.26 HTV capture box concept
(1)内捕获箱。内捕获箱是SSRMS抓取HTV上飞行可释放抓杆固定器之前对HTV 的要求:抓杆固定器的姿态与相对位置应保持在内捕获箱内至少5min。在这个区域内,HTV 抓杆固定器将被SSRMS抓取。
(2)中抓取箱。中抓取箱是SSRMS抓取HTV抓杆固定器期间对HTV 的要求。从抓杆固定器的插杆进入SSRMS端点作用器套索圈,直到围绕插杆的套索圈拉紧,在这个过程中,HTV 的控制系统被关断,HTV 处于自由漂移状态。中抓取箱包含内捕获箱,在自由漂移期间,HTV 抓杆固定器在中抓取箱内至少99s。
(3)总捕获箱。总捕获箱包含中抓取箱与内捕获箱,是由SSRMS的最大臂长及ISS几何与留隙约束限定的。在套索圈抓取插杆完成后,自由飞行体(HTV)被SSRMS减速,进入全停状态。总捕获箱包含整个捕获期(位置保持,自由漂移,减速制动)HTV 抓杆固定器所允许的位置。
在捕获箱内,HTV 应满足HTV 重心和抓杆固定器相对SSRMS基座的速度要求。SSRMS 基座是安装在和谐号舱天底侧的抓杆固定器[3]。HTV重心对SSRMS 基座平移速度需求是0.024m/s,HTV 抓杆固定器相对SSRMS 基座的速度为0.033m/s。HTV 重心相对ISS体坐标的转动速率为0.08(°)/s,HTV 抓杆固定器相对ISS体坐标的转动速率为0.1(°)/s。
3.6 HTV飞行运作[18-20,28-29]
HTV 由H-IIB运载火箭在JAXA种子岛空间中心发射升空,进入近地点高度约200km,远地点高度约300km 的椭圆轨道,并与H-IIB分离。星箭分离后,HTV 基于星上算法并用自身的推进系统继续向ISS交会飞行,可在高度350km 至460km 的范围内与ISS交会。在远距交会阶段,为了在预定时间到达预定的相对ISS的位置,HTV 执行多重轨道机动。星上软件中的制导逻辑计算每次机动的ΔV,传送至控制逻辑。这个过程称为“瞄准”(Targeting),在每次机动时提前进行。控制逻辑根据ΔV 生成发动机点火指令,通过发动机推进执行姿态控制与轨道机动。HTV 和ISS的状态矢量均需要用于“瞄准”。HTV 应用GPS接收机作为主导航手段,并获得地面系统上传的ISS 状态矢量。ISS状态矢量由GPS数据测定,GPS数据是从ISS JEM中的邻近通信系统获得的。在这个阶段,HTV 将使用TDRSS与位于筑波空间中心的HTV 控制中心进行通信,直到HTV 经由邻近通信系统与ISS建立起直接的通信链路。
其后,HTV 将使用邻近通信系统链路作为基本通信手段,应用GPS进行相对导航。ISS GPS数据由邻近通信系统直接传送给HTV,然后HTV 开始GPS相对导航,它比GPS独立应用的导航解更精确。HTV 根据GPS相对导航执行“瞄准”,并最终射入距ISS天底方向500m 的R-bar射入点。当交会的最后阶段(即R-bar逼近)开始时,HTV 将主导航手段由GPS相对导航转换为交会敏感器。交会敏感器提供相对于ISS上目标反射器的距离和视线方向;同时,位移控制方式由冲量型机动变为连续闭环控制。当HTV到达ISS之下10m时,一旦满足所有的捕获准则,即被指令进入自由漂移模式,在这个模式,所有的平移和姿态控制被关断。在确认HTV 自由漂移后,一名ISS乘员将操纵SSRMS抓取HTV,将其捕获。
然后,HTV 被转移并停靠在和谐号舱(节点2)的天底口。在HTV 与ISS的联接段,所有的加压/不加压货物或由ISS 乘员,或由SSRMS,转移至ISS。接着,ISS 中的废弃物被装进HTV,以后在HTV 再入地球大气过程中被处理掉。在联接段完成卸装任务后,HTV 再次被SSRMS 抓牢,并被释放到ISS下15m 处。然后,HTV 执行2次离开机动与2次下降机动以及3次降轨机动,到达南太平洋海域上的预定再入点。
HTV-1为技术验证飞行器,交会飞行(单飞)8天(原计划7天),停靠运作43天。HTV-1按星上功能执行自动交会,然而,并非完全自主运作,执行机动或经过保持点需获得地面运作控制的许可。地面运作控制的主要作用是决定“Go”或“No Go”的许可,并观测飞行器状态,以作出决策。地面运作控制也对每个功能单元执行开启、设置、功能检验以及关闭等运作。在任何异常情况发生时,地面运作控制将飞行器置于安全状态,然后提出最初的恢复动作。从发射到再入,运作控制在筑波空间中心的HTV 使命控制室执行。HTV-2交会飞行(单飞)7天,停靠运作30天(可延至60天),且有7天应急备用时间。
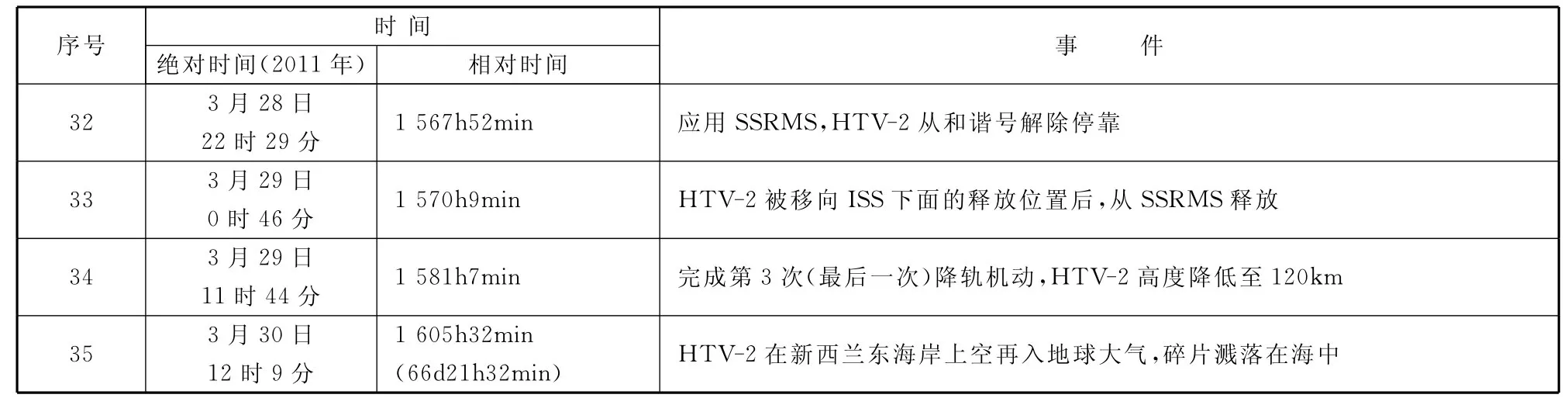
图27与图28分别表示HTV 交会飞行概况与邻近运作。图29为HTV-2交会飞行程序,表6列出HTV-2 飞行运作主要事件及相应时间。图30描绘HTV 重要事件的飞行状态。

图27 HTV 交会概况[19]Fig.27 HTV rendezvous flight overview

图28 HTV 邻近运作[19]Fig.28 HTV’s PROX operations

图29 HTV-2交会程序[28]Fig.29 HTV 2rendezvous procedures

图30 HTV 飞行状态示意图Fig.30 HTV flight schematic images

表6 HTV-2运作程序表[28-29]Table6 HTV-2operation procedures

续表6
续表6
3.7 HTV 小结
在ETS-VII自主交会技术的基础上,HTV 应用冗余技术及中止控制单元,实现船上FDIR 功能以及使命中止功能,确保HTV 满足“1次故障保任务”与“2次故障保安全”的要求。HTV 的自主交会(脱离地面站控制)能力将在系列飞行运作过程中得到增强。
HTV 加压货舱通向ISS的舱门足够宽,可转移国际标准有效载荷机柜,也可灵活装载作为加压货物的水,替代使用固定水罐系统。HTV 不加压货舱能够容纳不加压有效载荷,包括在ISS舱外运作的外部实验设备和轨道更换单元。
HTV 最显着的特点是R-bar逼近与应用空间自动臂的捕获停靠技术。HTV是唯一的从目标飞行器(ISS)轨道径向方向(R-bar)逼近,并以停靠方式与ISS对接的不载人飞行器。此外,应用自动臂也使HTV 能够以不加压货舱中的外露货盘大规模转运不加压货物,为舱外装备与试验服务。
4 结束语
从1997年11月ETS-VII“牛郎”与“织女”升空,在轨分离后又在次年7月7日(日本七夕节)相聚,至2009年第1只“白鹳”(HTV-1)飞向ISS,2011年第2只“白鹳”(HTV-2)与ISS相会,历经十多年的研发与飞行验证,日本已成功应用交会对接/停靠技术为ISS提供后勤补给服务。ETS-VII是纯粹的技术试验飞行器,主要试验目标是无人航天器交会对接与自动臂技术,这些技术不仅对未来的卫星在轨服务有意义,而且其中的自主交会与R-bar逼近试验有助于随后的HTV 研制工作。与ETSVII不同,HTV 则是为ISS提供后勤服务的货运飞船系列,HTV 的自主交会与R-bar逼近技术借鉴了经ETS-VII验证的交会技术,HTV 又独立开发了应用ISS 自动臂的捕获/停靠技术。HTV-1 作为HTV 系列的技术演示飞行器,不仅圆满完成了技术演示任务,而且为ISS 提供所需的后勤服务。HTV-2是HTV-1的改进型,增加了货运能力。
在自主交会技术方面,从ETS-VII到HTV-1具有技术继承与借鉴的关系,但HTV 的交会控制性能提升到新高度。在应用自动臂捕获飞行器方面,在ETS-VII试验中,自动臂是安装在追踪星(主星)上的,直接用于在轨主动捕获有效载荷或废弃物(空间碎片);而HTV 使命中的自动臂是安装在目标星(ISS)上的,HTV是被捕获对象,捕获运作是访问飞行器与空间站联接(停靠)的先决条件。
从ETS-VII到HTV,历经十几年的研制,日本在航天器交会对接/停靠技术与空间操作器应用技术领域取得显著成绩。ETS-VII的贡献主要体现在两方面:①ETS-VII成功进行的V-bar逼近与Rbar飞行试验,为后来的HTV 自主交会技术的研发奠定基础;②通过ETS-VII交会对接与空间自动机试验研发的技术,对卫星在轨服务技术与地球外天体的探测技术的发展具有重要价值。
HTV是为载人空间站ISS提供服务的不载人货运飞船,满足“1次故障保任务”与“2次故障保安全”的可靠性与安全性要求。空间站自动臂技术的应用不仅实现了HTV 对ISS的停靠运作,而且使HTV 大规模运载不加压仪器设备成为可能,显著增强了HTV 接替航天飞机运载能力任务的实力,这是HTV 性能优于欧洲航天局ATV 之处。此外,HTV 的严格的可靠性与安全性设计,不仅满足作为ISS后勤服务飞行器的要求,而且也为日本未来载人航天器的研制进行了技术储备,在这一点上,日本的HTV 与欧洲航天局的ATV 有相似之处。这就是说,先通过货运飞船掌握自主性很高的自动交会对接/停靠技术,尽快满足ISS的货运需求,进而研发可载人的大气再入返回舱段,建造送接空间站乘员的载人飞船,或既载人又可运货的两用飞行器。这种从货运飞船到载人飞船的研发途径,将不载人货运飞船的飞行试验与空间应用结合在一起,既降低了以后载人飞船的飞行试验风险,又有助于降低货运飞船飞行试验成本。
(References)
[1]朱仁璋.航天器交会对接技术[M].北京:国防工业出版社,2007 Zhu Renzhang.Rendezvous and docking techniques of spacecraft[M].Beijing:National Defense Industry Press,2007(in Chinese)
[2]Fehse W.Automated Rendezvous and Docking of Spacecraft[M].Cambridge University Press.2003
[3]朱仁璋,王鸿芳,泉浩芳,等.载人航天器操作器系统述评[J].载人航天.2009,16(4);2010,17(1)
Zhu Renzhang,Wang Hongfang,Quan Haofang,et al.AReview of Manipulator Systems onboard Manned Spacecraft[J].Manned Spaceflight,2009,16(4);2010,17(1)(in Chinese)
[4]朱仁璋,王鸿芳,徐宇杰,等.ATV交会飞行控制策略研究[J].航天器工程,2011,20(1)
Zhu Renzhang,Wang Hongfang,Xu Yujie,et al.Study of flight control strategy for the ATV rendezvous mission[J].Spacecraft Engineering,2011,20(1)(in Chinese)
[5]Suzuki M A,Takahashi T,Ohshima Y,et al.Global communication system of ETS-VII,AIAA-2000-1202[R].Washington:AIAA,2000
[6]Oda M.Attitude control experiments of a robot satellite[J].Journey of Spacecraft and Rockets,2000,37(6):11-12
[7]Fukushima Y,Inaba N,Oda M.Capture and berthing experiment of a massive object using ETS-VII’s space robot,AIAA-2000-4537[R].Washington:AIAA,2000
[8]Kawano I,Mokuno M,Kasai T,et al.Result of Autonomous rendezvous docking experiment of engineering test Satellite-VII[J].Journal of Spacecraft and Rockets,2001,38(1):1-2
[9]Yoshida K,Hashizume K,Nenchev D N,et al.Control of a space manipulator for autonomous target capture:ETS-VII flight experiment and analysis,AIAA-2000-4376[R].Washington:AIAA,2000
[10]Oda M,Nishida M.Space telerobot experiment system based on NASDAETS-VII satellite,AIAA-97-3558[R].Washington:AIAA,1997
[11]JAXA.Docking Mechanism (DM)[R/OL].[2011-01-21].http://robotics.jaxa.jp/project/ets7-HP/ets7_e/rvd/dm_e.htm
[12]JAXA.Docking surface of ETS-VII[R/OL].[2011-01-21].http://robotics.jaxa.jp/project/ets7-HP/ets7_j/rvd/image/ets7_ds.jpg
[13]JAXA.Rendezvous Radar(RVR)[R/OL].[2011-01-21].http://robotics.jaxa.jp/project/ets7-HP/ets7_e/rvd/rvr_e.htm
[14]JAXA.Proximity Sensor(PXS)[R/OL].[2011-01-21].http://robotics.jaxa.jp/project/ets7-HP/ets7_e/rvd/pxs_e.htm
[15]Hihara H,Nagai K,Miyoshi H,et al.Development of the Rendezvous Radar for the engineering test satellite VII,AIAA-98-1297[R].Washington:AIAA,1998
[16]Takata N,Kushiki K,Sakagami K,et al.Thermal tests of Engineering Test Satellite VII and thermal mathematical model evaluation,AIAA-98-1392[R].Washington:AIAA,1998
[17]Yamanishi N,Sakashita T,Kamiya T.CFD study for air ventilation optimization in the H-II Transfer Vehicle(HTV)Pressurized Logistic Carrier(PLC),AIAA-2010-6205[R].Washington:AIAA,2010
[18]Ueda S,Kasai T,Uematsu H.HTV tendezvous technique And GN&C design evaluation based on 1st flight on-orbit,AIAA-2010-7664[R].Washington:AIAA,2010
[19]JAXA.HTV-2 (Kounotori 2)mission press kit[R/OL].[2011-01-20].http://iss.jaxa.jp/en/htv/mission/htv-2/library/presskit/HTV-2_presskit_en.Pdf
[20]JAXA.HTV-1 mission press kit[R/OL].[2009-09-09].http://www.jaxa.jp/countdown/h2bf1/pdf/presskit_htv_e.pdf
[21]Sakashita T,Kamiya T.How the HTV cargo vehicle Is fully stuffed-cargo loading capability enhancement and result issues,AIAA2010-6046[R].Washington:AIAA,2010
[22]Kamiya T,Matsuda T,Fukatsu T,et al.HTV thermal control architecture and first flight result,AIAA-2010-6221[R].Washington:AIAA,2010
[23]Ohmine H,Yabushita T,Tanabe K.Communication analysis with ISS structure on HTV approach,AIAA-2007-3263[R].Washington:AIAA,2007
[24]Ueda S,Kasai T,Uematsu H.HTV guidance,navigation and control system design for safe robotics capture,AIAA-2008-6767[R].Washington:AIAA,2008
[25]Goodman J L.History of space shuttle rendezvous and proximity operations[J].Journey of Spacecraft and Rockets,2006,43(5):9-10
[26]Mclaughlin R J,Warr W H.The Common Berthing Mechanism(CBM)for International Space Station[R/OL].[2011-02-19].http://spacecraft.ssl.umd.edu/design_lib/ICES01-2435.ISS_CBM.pdf
[27]Searle I.Space station common berthing mechanism,a multi-body simulation application,NASA-N94-14640[R].Washington:NASA,1994
[28]JAXA.News:H-II Transfer Vehicle KOUNOTORI(HTV)-International Space Station-JAXA[EB/OL].[2011-02-19].http://iss.jaxa.jp/en/htv/mission/htv-2/news/
[29]JAXA.News:H-II Transfer Vehicle KOUNOTORI(HTV)-International Space Station-JAXA[EB/OL].[2011-03-30].http://iss.jaxa.jp/en/htv/mission/htv-2/news/