基于UG NX的数控机床多轴加工碰撞仿真研究
2011-12-13陆龙福赵世田
陆龙福,赵世田
(黄冈职业技术学院机电学院,湖北黄冈438002)
基于UG NX的数控机床多轴加工碰撞仿真研究
陆龙福,赵世田
(黄冈职业技术学院机电学院,湖北黄冈438002)
对数控编程计算机碰撞仿真加工进行分析和研究:通过在UG NX中进行二次开发,探讨了在UG NX中开发数控机床切削仿真加工环境的方法,并以DMU 70cV万能数控铣五轴联动加工中心为例,详细介绍了在UG NX中对特殊结构的数控机床的切削仿真加工环境进行开发的方法,开发了DMU 70eV在UG NX中的碰撞仿真加工环境。
数控机床;多轴加工;碰撞仿真
碰撞仿真的重点是机床各个运动部件的空间位置关系。检查机床运动是否出现碰撞、干涉等现象,适用于机床各个运动部件相对运动状况比较复杂,难以用传统的方法检查和控制的三轴以上数控加工。实际生产当中数控加工存在的碰撞问题主要有:机床主轴与工作台、夹具的干涉等。未经检验的错误的数控加工程序可能会导致加工出报废的产品,严重的情况会产生生产事故,例如折断刀具、撞坏机床的主轴或铣削了机床工作台,更严重的情况甚至会危及到操作人员的生命安全等。下面将从三个方面对数控机床多轴加工碰撞仿真进行论述。
1 UG NX模拟数控仿真加工的建立
UG NX当中提供了结构比较简单的机床的机床运动模型,可以进行碰撞仿真加工,首先建立DMU 70eV机床运动模型,然后建立其虚拟控制器,再将机床运动模型集成到UG NX集成系统中,最后实现在UG NX集成系统中建立工件实体模型、进行刀路规划与切削仿真,调用机床运动模型进行碰撞仿真,模拟数控机床加工进行加工程序的验证,验证合格后传输加工程序至数控加工机床进行生产加工,从而真正实现CAD/CAM一体化技术的无缝集成。
下面将以DMU_70eV加工中心为例介绍建立机床运动模型的方法和过程。
1.1 机床模型化与机床建模
通过分析DMU_70eV的机床各轴运动关系,对机床各运动组件模型化并建立机床模型,机床模型共包括六部分运动组件,分别是:机床床身、X轴运动组件、Y轴运动组件、Z轴运动组件、B轴运动组件和C轴运动组件。
1.2 机床零件建模与装配机床模型
在UG NX中分别建立机床六个运动组件的零件实体模型并分别存储,各部分运动组件及其对应零件名如下:
(1)机床的床身machine_base.prt
(2)机床的X轴运动组件x_slide.prt
(3)机床的Y轴运动组件y_slide.prt
(4)机床的z轴运动组件z_slide.prt
(5)机床的B轴运动组件b_slide.prt
(6)机床的c轴运动组件c_slide.prt
新建一个机床装配模型文件DMU_70eV 5.Axis_assetll title B_axis.prt,进入 UG NX 的装配模块,采用从底向上的设计方法建立机床装配模型。
1.3 机床运动模型的设置
打开机床运动模型零件DMU_70eV_zsq.prt进入机床构建器模块。打开机床导航条看到机床运动模型的名字No_name,将其重新命名为DMU_70EV、FIVE-AX、BC-TAB、XYZBC,命名规则含义如表1。
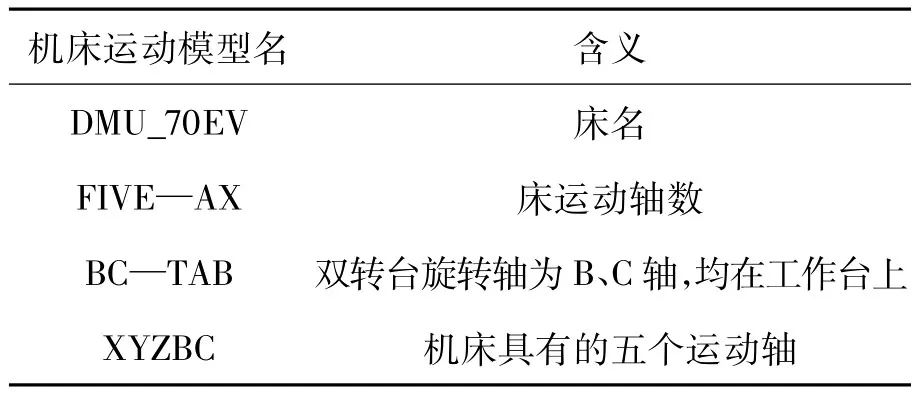
表1 机床运动模型命名规则含义
1.4 虚拟装配工件组的建立
虚拟装配工件组是指我们在机床运动模型中预留了零件、毛坯和夹具在机床中的装配位置,这样在调入机床运动模型进行程序代码模拟加工时可以实现零件、毛坯和夹具与机床运动模型的自动装配。
创建一个由虚拟的零件、毛坯和夹具构成的装配工件组SETUP。装配工件组下包括的组件有:工件PART、毛坯BLANK和夹具FIXTURE。在C_SLIDE组件下面插入一个运动组件SETUP,采用同样的方式在 SETUP下面创建 PART、BLANK和FIXTURE三个运动组件。
选择SETUP右键点击,对其迸行分类,选择SETUP_ELEMENT,同样的方式对其包含的三个组件进行分类,经过分类后它们的类型如下:
PART:PART 和 SETUP_ELEMENT;
BLANK:WORKPIECE和SETUP_ELEMENT;
F1XTLIRE:SETUP_ELEMENT。
1.5 机床运动模型联接点的建立
该机床需要创建联接点主要有以下几个:机床坐标系原点 MACHINE_ZERO、刀具装配联接点TOOL_MOUNT_JCT、两个工作台旋转联接点ROT_C_ZSQ和ROT_B_ZSQ(B和c轴的旋转中心)以及装配工件组与机床运动模型自动装配联接点PART_MOUNT_JUNCTION_ZSQ。1.6 机床运动模型运动轴的建立
创建机床运动轴,即对机床进行各个运动轴的分配,DMU_70eV万能数控铣是五轴联动加工中心,需要建立的运动轴是X、Y、Z、B和C轴,以及它们的运动范围和运动参考点等。
首先建立x轴,右键点击X SLIDE,选择insert-axis,输入名字x,选择直线运动轴x轴的参考基准联接点,三个直线轴均参考联接点机床原点MACHINE ZERO,选择联接点处的坐标系的方向为+x向,定义该轴类型为直线轴,输入机床该轴的运动范围上限750和下限0。
类似的方法建立了Y、z、B和c轴,完成机床坐标轴的建立,其中B、c轴的类型为旋转轴,参考机床的联接点分别为ROT_B_ZSQ和ROT_C_ZSQ,最终完成DMU_70eV万能数控铣五轴联动加工中心机床运动模型的建立。
2 装配工件组与机床运动模型的自动装配
为了实现装配工件组与机床运动模型的自动装配,需要做如下工作:
1、首先建立零件模型,可采用UG NX或者其它CAD/CAM集成软件系统已建立好的零件实体模型;
2、建立零件毛坯模型,建立夹具零件模型,夹具零件模型建立一次即可,每次根据需要选用;
3、新建一个文件夹,将零件模型文件、毛坯模型文件、夹具组文件等都放置到在该文件夹,新建立一个装配文件名asm.part_blank,将零件、毛坯和夹具组等都装配起来;
4、建立一个加工部件名 my_test.prt,将装配文件作为一个部件装配进入加工部件,然后进入加工模块,创建工件的所有加工操作,完成了零件所有的粗加工、半精加工和精加工等操作,生成刀轨,存储加工部件名my_test.part;
5、建立装配工件组,在机床导航条中的设置配置器下点击no_name,插入一个组件setup,在其下建立三个组件part、blank和fixture,并分别选择几何体,也就是图形区中的零件、毛坯和夹具;对组件进行分类→设置装配工件组与机床运动模型→实现自动装配的联接点part_motmt jct,一般选择角点、圆心、对称中心点等;
6、在操作导航工具条下的刀具组中双击GENERIC MACHINE,选择 replacemachine,在机床工具库中选择铣床类mill并双击,在铣床类列表中选择新建的机床DMU 70eV zsq,替换机床对话框显示,选择自动将装配工件组定位到机床模型或者自动定位机床模型到工件组;
7、选择自动将装配工件组定位到机床模型,则装配工件组自动的将我们在加工部件的装配工件组中定义的联接点part_mountjct与机床运动模型中定义的part_mountjet重合,也就是将两个坐标系原点重合,对应的坐标轴方向一致,这样装配工件组中的零件、毛坯和夹具组就自动的定位到机床工作台上,从而省去了手工定位的麻烦,也可以根据零件实际装夹情况手动定位装配工件组。如果定位不合适,或者模拟产生碰撞和干涉问题,可以再重新定位装配工件组,直到没有碰撞和干涉问题为止。
3 利用机床运动模型对数控加工程序进行碰撞仿真分析
在数控模拟仿真模型建立完成后,通过UG软件生成模型加工仿真模拟,如图1所示,通过产生的模拟控制面板如图2所示,进行碰撞和干涉问题的检测。
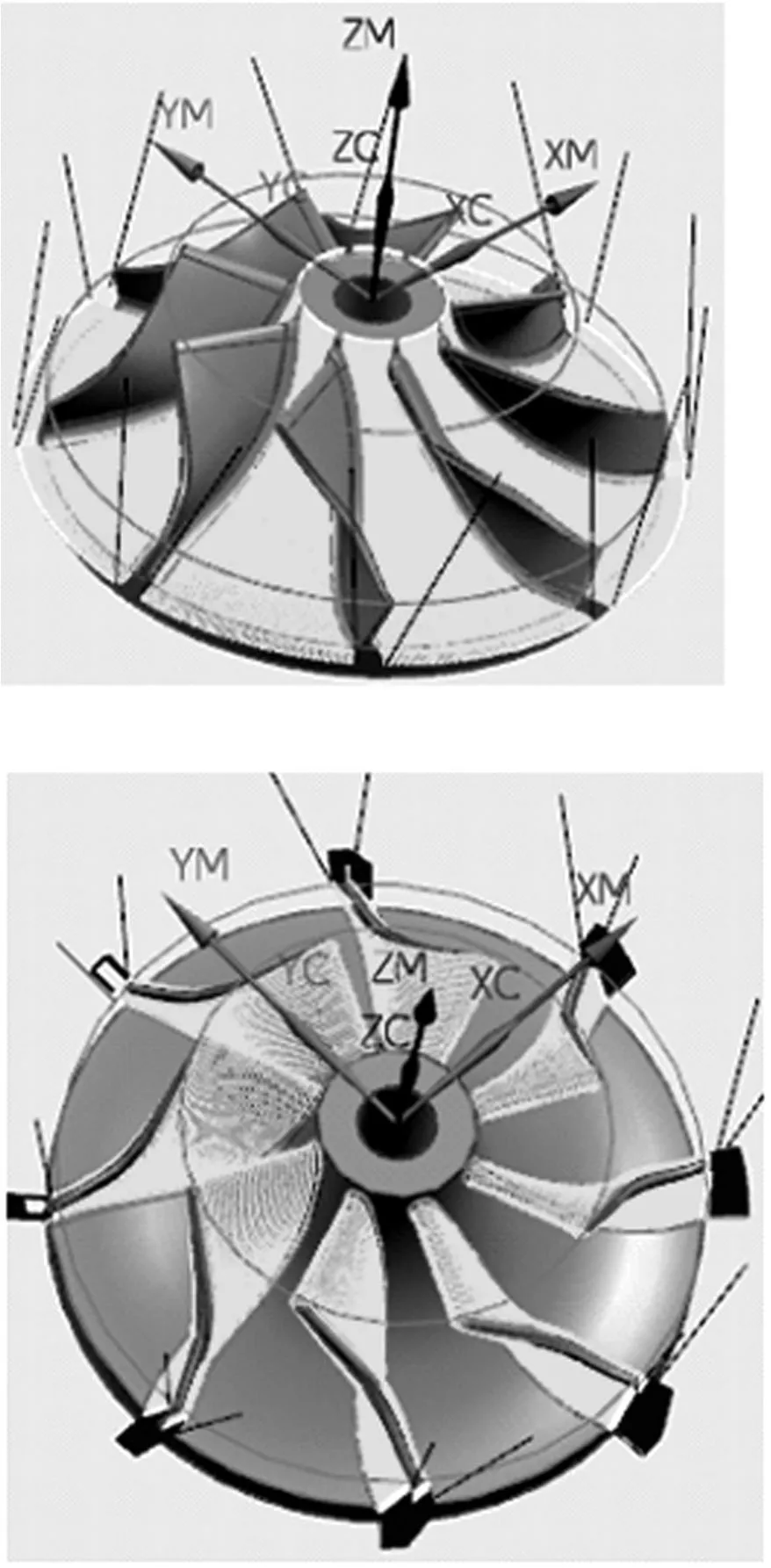
图1 叶片模型模拟加工
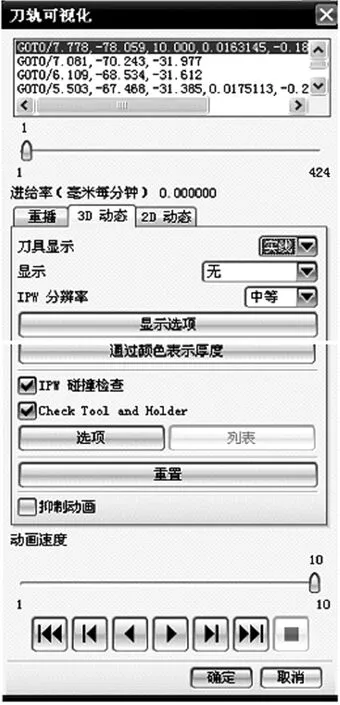
图2 模拟控制面板
仿真模拟加工最重要的一项就是进行碰撞和干涉问题的检测。UG NX模拟中有碰撞配置选项,可以配置要检测碰撞和干涉问题的检测对象,(如图2所示),通常的碰撞和干涉检测对象是机床主轴和机床上面的夹具或者工作台之间的碰撞,首先从图形区选择碰撞和干涉检测对的第一组组件,完成后激活第二组组件选项,选择组件,设置好检测安全距离,比如两者之间的距离达到1mm时就认为是两者发生了碰撞和干涉,所以模拟系统就发出警告信息,将警告信息显示在信息窗口,并弹出对话框等待确认是继续进行加工模拟还是终止模拟。在模拟加工过程中如果发生碰撞和干涉运动,信息窗口会显示出发生碰撞和干涉问题的代码程序段,由此就可以判断出发生碰撞和干涉问题的原因,例如:
信息:Clearance SPINDLE/FIXTURE@N412 G01X4.0709 Z1.0431
通过程序窗口的上一句程序和本句程序可以判断出,是Z向发生了碰撞和干涉,这是由于刀具长度不够所引起的碰撞和干涉,可以重新选择刀具,然后重新生成程序再模拟加工。
如果是由于机床运动超程问题,例如Z向超程,则根据信息显示和加工程序,可以判断出超程的距离,从而参照这个距离将工件在机床工作台上进行重新定位,然后再模拟加工程序。
[1]王庆林,李莉敏等.UG CAM应用案例集(NX 版)[M].北京:清华大学出版杜,2003.
[2]陈汉军.雕塑曲面多坐标数控编程的研究与实现[D].南京:南京航空航天大学,1996.
[3]胡寅亮,熊涛等.五轴联动数控机床的后置处理方法[J].机械科学与技术,2003,22(增刊):175 ~177.
[4]刘日良,张承瑞等.5轴数控机床坐标系统的一个特例及其后置处理方法[J].机械设计与制造工程,2002,31(3):61 ~62.
Research on Multi-Axis Machining Crash Simulation Based on UGNXCNC Machine Tools
LU Long-fu,ZHAO Shi-tian
(Huanggang Polytechnic College Huanggang 438002 Hubei)
Analysis and research on multi-axis machining crash simulation based on UG NX CNC machine tools:through the second development of UG NX,the author discussed about the methods of the processing environment simulation in UG NX cutting CNC machine tools,taking the DMU 70cV universal five-axis CNC milling processing center as an example,described in details the methods of the processing environment simulation in UGNX cutting CNC machine tools,developed the DMU 70eV crash simulation processing environment collision in UG NX.
CNC machine tools;Multi-axis machining;Crash simulation
TP272
B
1672-1047(2011)05-0096-04
10.3969/j.issn.1672-1047.2011.05.25
2011-09-08
陆龙福,男,贵州人,工程师。研究方向:模具设计及制造。
[责任编辑:倪祥明]
