IMU/DGPS辅助航空摄影新技术在铁路勘测中的应用
2011-11-29杨少文
杨少文
(中铁二院,四川成都 610031)
解求航片的外方位元素是摄影测量的基本问题之一。长期以来,像片的外方位元素主要通过大量地面控制点进行空中三角测量来间接解求。为了缩短成图周期,减小外业工作量,从20世纪50年代起人们就开始尝试利用高差仪、地平摄影仪等附加仪器来直接测定部分外方位元素,但由于精度难以满足要求,未能得到广泛应用。
20世纪90年代以后,GPS辅助空中三角测量技术大大减少了摄影测量对地面控制点的需求,但GPS数据采样频率低,只能依靠时间内插出像片的摄影中心坐标,精度比较低。也无法测定曝光瞬间航摄仪的姿态信息,所以还要进行空三处理,只能满足中小比例尺成图的精度要求。
惯性导航测量单元IMU可以获取包括位置、速度、姿态、加速度和角速率在内的全部导航参数,但存在着误差随时间迅速积累增长的缺陷。GPS与IMU可以取长补短:GPS数据可在运动过程中频繁修正IMU以控制其误差的累计;而短期内高精度的IMU定位结果可很好解决GPS在高动态环境中的信号失锁和周跳问题。因此,GPS/IMU组合定位系统(亦称POS系统)可以连续提供传感器高精度的位置和姿态参数。
加拿大Applanix公司于1996年率先推出了基于IMU/DGPS技术的机载传感器定位系统(Positioning and Orientation System for Airborne Vehicle—POS/AV),德国IGI公司也相继推出了AEROcontrol-IID型集成传感器定位系统。随着IMU/DGPS系统在遥感领域内应用的日益广泛,由其所提供的外方位数据的精度、有效性等问题越来越受到关注。目前,国内IMU/DGPS辅助航空摄影技术处于进一步试验研究和逐步应用于生产的阶段。中铁二院测绘院与国内飞行单位合作,利用这两套成熟的商用化POS系统在铁路选线中进行了一系列的试验,摸索出了一套适合铁路选线的IMU/DGPS辅助航空摄影作业流程。
1 IMU/DGPS相关理论知识
1.1 基于IMU/DGPS的摄影测量工作原理
按照摄影测量共线方程的原理,物方空间坐标与像方空间坐标存在下式关系
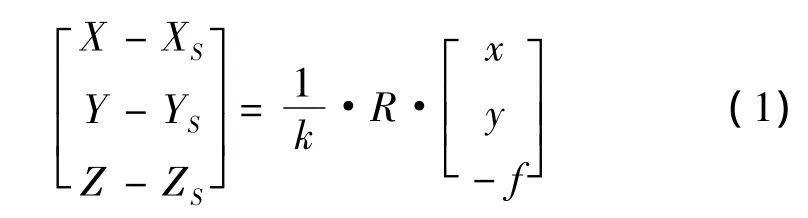
其中,x,y为像点的像片坐标;
f为航摄像片的焦距;
XS,YS,ZS为摄站点物方空间坐标;
X,Y,Z为地面点物方空间坐标;
k为比例尺缩放系数。
R是航摄像片的三个姿态角φ、ω、κ所构成的正交变换矩阵

由此可知,确定物方空间坐标的关键在于:精确确定摄影中心的空间位置(XS,YS,ZS)及航摄仪曝光瞬间的姿态参数(φ、ω、κ)。
1.2 摄影中心空间位置的确定
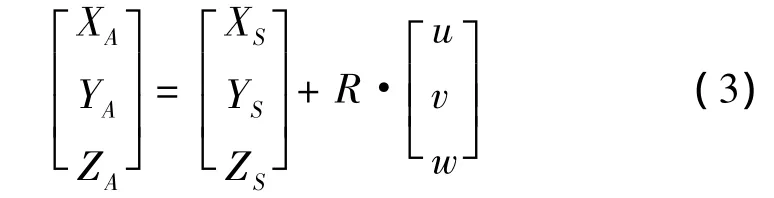
集成系统利用安设在航摄飞机和一个或多个地面基准站上的GPS接收机,采用差分动态GPS定位方法来联合测定摄影中心的空间位置。航空摄影完成后,对机载和地面GPS信号接收机所记录的载波相位观测量进行测后数据处理,便可得到每一个观测历元时刻机载GPS天线相位中心的空间位置。在机载IMU/DGPS集成系统和航摄仪集成安装时,GPS天线相位中心A和航摄仪投影中心S有一个固定的空间距离。在航空摄影过程中,点A和点S的相对位置关系保持不变,即点A在像空间辅助坐标系S-uvw中的坐标(u,v,w)是常数。假设点A和点S在大地坐标系MXYZ 中的坐标分别为(XA,YA,ZA)和(XS,YS,ZS),则它们满足如下关系式
1.3 航摄仪姿态参数的确定
从公式(3)中可以看出,机载GPS天线相位中心的空间位置与航摄像片的三个姿态角φ、ω、κ相关,也即利用机载GPS观测值解算投影中心的空间位置离不开航摄仪的姿态参数。IMU/DGPS集成系统中的惯性测量装置IMU即三轴陀螺和三轴加速度表,是用来获取航摄仪姿态信息的。IMU具有很高的精确度,而且数据更新频率远高于GPS接收机,但长时间持续测量会使精确度有所降低。运用动态GPS观测数据可以进行误差的补偿并归零。
IMU获取的是惯导系统的侧滚角ψ、俯仰角ω和航偏角κ,由于系统集成时IMU三轴陀螺坐标系和航摄仪像空间辅助坐标系之间总存在角度偏差(Δψ,Δω,Δκ)。因此,航摄像片的姿态参数需要通过转角变换计算得到。航摄像片的三个姿态角所构成的正交变换矩阵R满足如下关系式

(ψ,ω,κ)为IMU获取的姿态参数;
(Δψ,Δω,Δκ)为 IMU 坐标系与像空间辅助坐标系之间的偏差。
在测算出航摄仪的3个姿态参数后,根据公式(3)即可解算出摄站的空间位置信息。从而得到航摄像片的6个外方位元素。
2 IMU/DGPS辅助航空摄影的主要误差源
2.1 GPS系统误差
GPS定位服务分为民用标准定位服务(SPS)和军用精密定位服务(PPS)两大类。目前SPS的精度限制在100 m左右,显然这种精度不能满足航空摄影测量的要求。如何利用GPS信号高精度地测定航摄仪的摄站位置是一个关键技术问题。
差分动态定位原理是利用安设在一个运动载体上及地面一个或多个基准点上的GPS信号接收机来联合测定运动载体的三维位置。差分动态定位的基本思想是:在一定的空间范围内各个空间位置的GPS信号的系统误差基本相等。由于基准点的坐标已知,且其精度远高于GPS信号,可以认为是真值。如此通过一个或多个基准站就可以获取每个GPS观测历元时刻的GPS系统误差,再用这个误差值去修正运动载体上的GPS观测值,从而精确得出每个观测历元时刻该运动载体的空间位置。
研究表明:利用载波相位GPS动态定位技术,平面精度可达2 cm,高程精度可达5 cm。利用动态差分GPS定位技术测定的摄站位置可以满足摄影测量的精度要求。
2.2 GPS/IMU的卡尔曼滤波
IMU的特点是能自主定位,数据输出频率高,但是累积漂移误差大。试验表明:持续工作超过1 h后,IMU在一个方向上的描点能力将漂移几度。实现GPS/IMU组合导航系统可优势互补、取长补短。用GPS接收机的高精度定位信息,通过组合滤波器来标定和补偿捷联系统的积累误差,进而提高导航精度。
GPS/IMU组合导航的基本思想是:在航摄飞机航摄前,利用修正程序计算陀螺的漂移,对IMU进行航向校准。在数据后处理过程中,利用GPS测量的载波多普勒频移和IMU参数,计算速度及航向;利用GPS和IMU的测量结果,采用最小二乘法,计算位置、俯仰、横滚等参数;利用GPS的测量结果,对IMU本地平台参数进行修正。
机载IMU/DGPS集成系统利用GPS/IMU组合导航,融合GPS和IMU各自的优点,采用卡尔曼滤波进行组合数据处理,能够稳定地导航航空摄影飞机。但由于卡尔曼滤波方法本身是个不断的迭代过程,其数据处理的质量很大程度上取决于技术人员的经验,因而其质量控制十分重要。
2.3 GPS、IMU及航摄仪三者之间的时间同步
机载GPS、IMU及航摄仪的工作是相互独立的,GPS信号的历元时刻ti与航摄仪的曝光时刻tj往往不同步。由于飞机航速较大,不大的时间偏移会造成较大的距离误差;同时,根据航摄仪曝光脉冲记录的IMU姿态参数也会由于时间不同步而存在误差,从而影响定位精度。一般认为飞机在航空摄影的较短时间内是匀速飞行的,可以采用线性内插或低阶多项式拟合的方法来消除时间偏移。试验表明,如果GPS信号接收机的数据更新率大于1次/s,由两个相邻GPS历元ti和ti+1(ti<tj<ti+1)的天线位置线性内插出的tj时刻的天线位置,可以满足航空摄影测量的精度要求。
2.4 GPS与航摄仪的空间偏移
机载GPS天线相位中心和航摄仪投影中心在空间位置上是分离的,两者之间有一个固定的空间距离。航空摄影过程中,机载GPS天线相位中心在像空间辅助坐标系S-uvw中的坐标(u,v,w)是常数。通常在航拍前对上述3个值进行测定,并视为“真值”纳入联合平差系统中。实际上,测定的空间偏移总是带有误差的,将其视为“真值”是不严密的。机载POS对地定位系统中,一般将空间偏移分量作为带权观测值或者直接当作未知数求解。
2.5 IMU与航摄仪之间的检校参数误差
直接地理定位中,检校参数的稳定性是至关重要的。研究表明,受机载环境温度和压力的影响,检校参数在一天之内的变化可达6 mgon,而时间较长时最大可达20 mgon。因此,对检校参数的稳定性进行评价,准确消除误差是开展高精度直接地理定位的前提。
3 铁路勘测试验研究
中铁二院与国内飞行单位合作,采用IMU/DGPS辅助航空摄影技术在云桂线线、川藏线铁路项目中进行了数据采集、处理、精度验证等工作。
3.1 数据获取
IMU/DGPS辅助航空摄影与传统航摄有较大的区别,飞行过程中要同步获取影像、机载POS数据、地面基站等数据。为了后期检较处理,还必须在飞行同时额外飞行检较场数据。由于铁路大比例尺成图摄影比例尺通常采用1∶10 000,所以本次试验采用的航摄比例尺都是1∶10 000。
3.2 IMU/DGPS数据预处理
IMU/DGPS数据预处理主要是将原始GPS、IMU观测值转换为航摄仪透视中心的空间坐标并计算各像片的俯仰(pitch)、侧滚(roll)和航偏角(yaw)。预处理过程需要考虑GPS天线、IMU中心与航摄仪坐标系原点之间的偏心矢量。
3.3 系统误差检校
利用检校场试验飞行获取的航片、IMU/DGPS数据以及地面实测的控制点信息,通过空中三角测量的方法可确定IMU轴线偏差、GPS漂移、航摄仪内方位元素、GPS天线偏心和时间同步等误差参数。以此为基础,改正试验区每张航片的IMU/DGPS数据,进而获得更高精度的每张航片的6个外方位元素。
3.4 直接地理定位精度分析
通过IMU/DGPS辅助航空摄影测量技术获取的高精度外方位元素可以直接用来进行定向测图,利用JX4或Virtuozo工作站进行外方位元素安置定向,定向过程中如果发现个别相对视差较大,可以先自动进行相对定向,对单模型外方位元素进行平差即可消除视差。
通过在既有1∶2 000地形图上量取一定数量的检查点,利用IMU/DGPS提供的外方位元素直接进行单个立体像对前方交会,解求检查点坐标,与1∶2 000图上量取的坐标值比较进行精度分析,结果见表1。
3.5 POS辅助空三试验及精度分析
通过直接定向发现,IMU/DGPS辅助航空摄影测量技术获取的航片外方位元素在定向过程中会出现有视差的情况,影响了最终的成图精度,这主要是由于POS系统测角精度还无法达到空中三角测量的精度要求。为了进一步提高IMU/DGPS数据的精度,进行更大比例尺的制图工作,必须进行POS辅助空中三角测量。
利用VirtuoZo AAT软件对云桂线、川藏线铁路试验项目的IMU/DGPS辅助摄影数据进行了POS辅助空三处理,并验证了采用无控、均匀分布的4个控制点、6个控制点、8个控制点方式POS辅助空三试验,并利用大量的外业多余控制点进行了精度统计,结果见表2、表3。
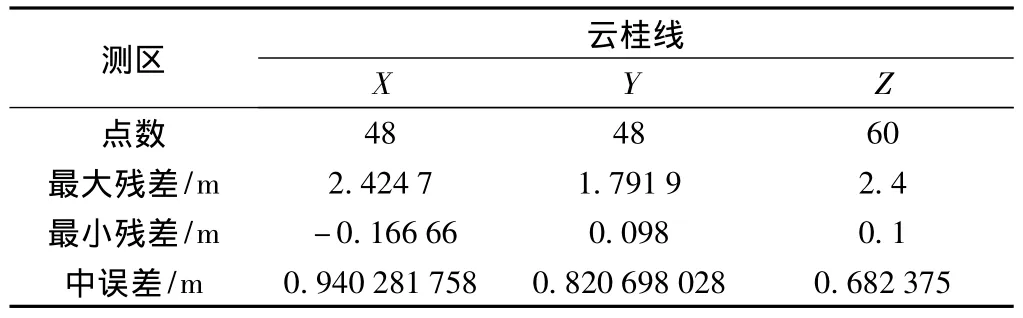
表1 检查点精度

表2 云桂线POS辅助空三精度统计m

表3 川藏线POS辅助空三精度统计m
3.6 结论
(1)从表1可以看出,直接地理定位方法的精度完全能满足铁路摄影测量规范中1∶10 000比例尺测图对应残差和中误差的要求,由于实现了测区内无需地面控制、空三作业过程,极大地提高了摄影测量的工作效率,是常规空中三角测量的一个重要替代手段。
(2)采用POS辅助空三处理后,通过控制点的检查结果可以看出,残差和中误差都比直接地理定位方法有明显的减小。
(3)采用POS辅助空三处理,即使不用控制点也能满足铁路1∶2 000制图的精度要求,采用4个以上的控制点会使精度有所提高,但随着控制点数量的增加,精度变化不大。采用IMU/DGPS辅助航空摄影测量技术进行铁路大比例尺成图时,可以大量减少控制点数量,提高铁路航测的效率。
4 展望
IMU/DGPS集成系统实现了摄影测量学者长久以来直接测量像片外方位元素的夙愿,是目前航空摄影测量最理想、最高效的作业方式。它大大减少了对地面控制点的需求,显著缩短了成图周期,加快了城市地理信息数据库和地形图的更新。随着研究的进一步深入以及GPS系统、IMU系统、数据处理技术的发展,直接地理定位和集成传感器定向的精度将进一步得到提高。
目前,IMU/DGPS集成系统除了应用了航空摄影之外,已被广泛应用于其他现代遥感技术中,许多传感器系统都集成了高性能的IMU/DGPS集成系统,如机载激光雷达、推扫式相机等产品中,有力地推动了现代遥感技术的进展。
[1]袁修孝.GPS辅助空中三角测量原理及应用[M].北京:测绘出版社,2001
[2]袁修孝.GPS辅助空中三角测量及其质量控制[D].武汉:武汉测绘科技大学,1997
[3]陈小明.高精度GPS动态定位的理论与实践[D].武汉:武汉测绘科技大学,1999
[4]李德仁,郑肇葆.解析摄影测量学[M].北京:测绘出版社,1992
[5]董绪荣,张守信,华仲春.GPS/INS组合导航定位及其应用[M].长沙:国防科技大学出版社,1998
[6]郭大海,吴立新,王建超,等.机载POS系统对地定位方法初探[J].国土资源遥感,2004(6)
[7]Heipke C,K.Jacobsen,H.Wegmann.Integrated Sensor Orientation[J].OEEPE Official Publication,2002,43(4)
[8]Christian Heipke,Karsten Jacobsen,Helge Wegmann.The OEEPE Test on Integrated Sensor Orientation[J].Photogrammetric Week 2001,Stuttgart,Germany.
[9]Michael.Cramer,Dirk.Stallmann,On the use of GPS/Inertial exterior orientation parameters in airborne photogrammetry[J].OEEPEWorkshop Integrated Sensor Orientation,2001.
[10]Michael Cramer:Integrated GPS/inertial and digital aerial triangulation?recent test results,in Photogrammetric Week 2003,Stuttgart,Germany.
[11]Liang Tang,Jens Kremer,Helmut Kohlhaas:Introducing DGPS/IMU-based Photogrammetry to China,in Photogrammetric Week 2003,Stuttgart,Germany.
[12]Kremer J,Kruck E.Integrated Sensor Orientation-Two Examples to show the Potential of simultaneous GPS/IMU and Image Data Processing,in Theory,Technology and Realities of Inertial/GPSSensor Orientation,ISPRSCommision I,2003,Castelldefels,Spain.
[13]H onkavaara E,Jaakkola J,Risto Ilves.Practical Results of GPS/IMU/Camera System Calibration,in Theory,Technology and Realities of Inertial/GPSSensor Orientation,ISPRSCommision I,2003,Castelldefels,Spain.