全站仪自动化变形监测系统研究与开发
2011-11-29杨元伟
谷 川 杨元伟
(1.上海市政工程设计研究总院(集团)有限公司,上海 200092;2.上海市政工程检测中心有限公司,上海 201114)
工程建设等行业的迅猛发展,对变形监测工作提出了更高的要求,逐渐形成了对自动化变形监测的实际需求。具有自动目标照准功能全站仪的出现和发展,为实现变形监测自动化提供了机遇,基于自动化全站仪的自动化变形监测系统的研究和开发相继开展起来。
国外,瑞士Leica公司开发出的自动极坐标测量系统—APS(Automatic Polar System),为利用大地测量方法进行自动变形监测做出了开创性的贡献。Leica公司推出的Geomos(Geodetic Monitoring System)自动监测系统,已经相对比较完善。国内也有一些高校、科研单位在积极研究和开发基于自动全站仪的自动化变形监测系统。例如,国内中南大学张学庄开发研制的“SMDAMS亚毫米级精度大坝自动变形监测系统”,Leica郑州欧亚测量系统有限公司与解放军信息工程大学测绘学院联合开发的ADMS自动变形监测软件,武汉大学张正禄开发研制的测量机器人变形监测系统GRT-DEMOS(Geo-robot Deformation Monitoring System)等[1]。
比较目前国内外已有的基于自动全站仪的自动化变形监测系统可以发现:国外的软件已经相对比较完善,但是存在的问题是功能过于丰富,针对性不强,产权为国外垄断,售价过高,超出一般企业的承受范围,限制了基于自动全站仪的自动化变形监测系统在国内的推广应用;国内的软件多针对某一工程或者某类工程开发,主要以大坝等的自动化变形监测为主,功能比较单一,缺乏针对桥梁、隧道、基坑等类型建筑工程项目的特色软件。
因此,有必要根据建设工程行业的需求开发一套能够满足行业需求、行业特色鲜明、基于自动全站仪的自动化变形监测软件。
1 系统整体设计
1.1 系统组成
基于自动全站仪的自动化变形监测系统由棱镜组、自动全站仪、控制电脑、软件、通讯设备等组成。
棱镜布设在能反映结构体变形特征的特征点位置,并应注意加以保护。全站仪设立在基准点或工作基点上,要求点位相对稳定,能轻松找寻目标点并实现实时观测。控制电脑放置在工作房内,通过有线或无线方式与仪器连接,通过电脑内安装的软件控制自动全站仪进行数据采集,并且自动进行数据分析与处理工作。对于工程中的特殊要求能够进行特殊考虑。
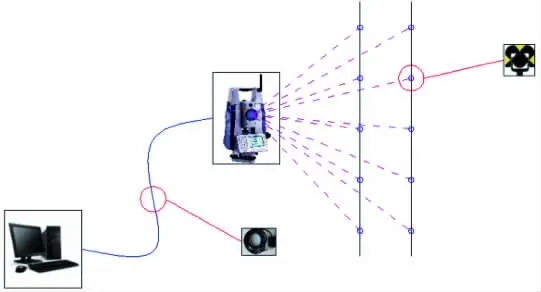
图1 全站仪自动化变形监测系统组成
1.2 软件功能设计
自动化变形监测软件主界面主要由菜单操作区域、工程信息操作区域、观测数据区域、日志信息区域、图形区域几部分组成[2],如图2所示。

图2 自动化变形监测软件主界面
操作菜单主要实现对软件的操作,以控制仪器完成各项观测任务,软件完成各项计算、分析、绘图等任务。工程信息控制区域主要控制观测数据区域和日志信息区域显示的内容。数据显示区域主要显示测点观测数据信息。日志信息区域主要显示测量过程中的行为和必要的中间计算结果,以便于在测量发生问题时查找问题和追溯原因。图形显示区域主要显示测站、观测点等的位置信息,可进行三维显示、平移、旋转、缩放等。
2 差分功能算法研究
2.1 斜距差分改正模型
在极坐标变形监测系统中,必须考虑大气条件的变化对距离测量的影响。利用基准网的测量信息,可以在无需测量气象元素,简化系统设备配置的条件下,实时进行距离的大气折射率差分改正。
在自动极坐标的差分测量系统中,测站点与基准点均设置在稳定的位置上,可以认为它们之间的距离是稳定不变的。设监测站至某基准点的已知斜距为,在变形监测过程中,某一时刻实测的斜距为,两者之间的差异可以认为是由气象条件变化引起的,按下式可求出气象改正比例系数Δsi

为了保证距离气象改正比例系数Δsi的可靠性与准确性,实际中可以取多个基准点测定的距离气象改正比例系数Δsi的平均数,用于距离测量的差分气象改正。

根据平均气象改正系数Δs,分别应用于每个基准点,求出基准点的真实斜距SJ-i

如果同一时刻测得的某变形点的斜距为S'P-i,那么经气象改正差分后的真实斜距为

2.2 三角高程差分模型
球气差影响原理如图3所示。
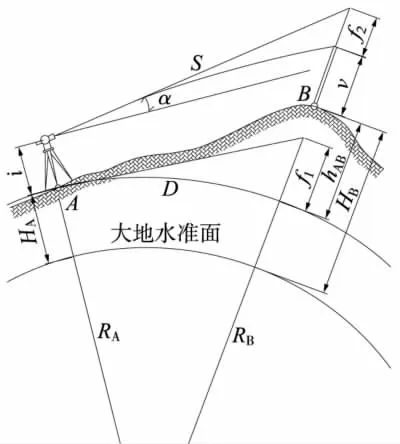
图3 球气差的影响示意
为了准确测定变形点的三维坐标,在极坐标的单向测量中,必须考虑球气差对高程测量的影响。在变形监测网的测量中,基准点与测站点之间的高差是可知的。如上述的距离测量一样,如果某一时刻测得测站与基准点之间的三角高差h'J-i为

式中,α为垂直角,i为仪器高,l为目标高。
将球气差写在一起,即令

那么根据下式可求出球气差改正系数c

式中,R为地球平均曲率半径(取6 371 km)。
测站至基准点的视线范围最好能够覆盖所有变形监测点,可利用基准点按式(7)求得球气差改正数c,能较好地代表变形监测区域的大气模型。
在每周期变形点的监测过程中,由于测量时间较短(约数分钟),可以认为c值对基准点与变形点的影响是相同的,故按照下式可求出变形点与测站点之间经球气差改正的三角高差ΔhP

2.3 方位角的差分改正
在长期的变形监测中,难以保证仪器的绝对稳定。水平度盘0°00'00.0″方向的变化,对水平方位角的影响不可忽略[3]。在变形监测中,所求的变形量是相对第一周期而言的,故可把基准点第一次测量的水平方位角作为基准方位角,其他周期对基准点测量的方位角与基准方位角相比,有一差异ΔHZ

这一差异主要是由于仪器不稳定引起水平度盘0°00'00.0″方向的变化、大气水平遮光等对方位角的影响而引起。此差异对变形点的测量有相同的影响,故在变形点每周期的方位角测量值H'ZP中,实时加入由同周期基准点求得的ΔHZ改正值,可准确求得变形点的方位角HZP

3 特殊问题的考虑
3.1 视场内出现多个目标
视场中出现多个目标的问题,各个测量仪器生产厂家都给予了足够的重视[4]。
Leica自动化全站仪识别CCD视场中出现多个棱镜的方法是缩小视场,但是如果缩小后的视场内仍有2个以上的棱镜,就不能再正常测量了。
Sokkia自动化全站仪解决视场内有多个棱镜的识别方法为“就近法则”。即通过特别的数学计算规则,查看视场内距离望远镜十字丝中心最近的棱镜是哪一个,全站仪就自动驱动轴系照准该棱镜。
Trimble自动全站仪则采用选择目标模式的方法:主动目标或被动目标。
比较和分析:
(1)徕卡小视场技术和索佳就近原则能够解决一部分视场内出现多个棱镜的情况,但是,不能从根本上解决问题,该方法可认为是软件方法。
(2)天宝全站仪通过棱镜编码技术和棱镜开关技术可以从根本上解决该问题,该方法可认为是硬件方法,但是,其高昂的价格也是一般企业难以承受的。
一般而言,在设置测站时可尽量避免该情况的出现。实在不可避免时,可考虑采用硬件方法或软件方法辅助克服。
3.2 棱镜被遮挡的处理
棱镜遮挡是自动化测量过程中常发生的现象,在软件中进行了如下的处理:
第1次测量被遮挡,则跳过该点进行下一点的测量,一轮测量完成后,对未能观测到的点进行新一轮搜索,如果新一轮搜索仍未找到,则弹出对话框由人工决定是继续寻找或放弃测量该点,并且开始倒计时,缺省设置为放弃该点,倒计时时间为10 s。
3.3 测站不稳定处理
很多情况下,例如桥梁、基坑等工程的自动化变形监测中,由于布设了多个棱镜,仪器架设在基坑或者桥梁中间附近的位置往往是最方便观测的。但是,由于仪器架设在变形影响区域内,很有可能会发生位移。而如果架设在变形影响范围之外,则由于仪器的辐射角度变小,容易发生视场内出现多个棱镜和目标被遮挡的情况。因此,采用变形场外控制点将所有变形点控制在同一坐标系统内是一个好的解决方法。
测站不稳定时的处理,主要有以下几种方法:
方法(1):通过后方交会或者测边、边角交会求得测站点的坐标,然后计算各观测边方位角并取方位角均值作为定向数据。
方法(2):直接测量2个或以上控制点的坐标,通过基准点实测坐标和理论坐标求得坐标转换参数,将测站坐标转换为目标坐标系下的坐标后,修正测站以及定向数据,然后进行监测点的测量。
方法(3):直接测量2个或以上基准点的坐标以及所有监测点的坐标,通过基准点实测坐标和理论坐标求得坐标转换参数,将监测点坐标转换到目标坐标系下。
3种方法相比较而言,都可以解决测站不稳定的问题,第3种方法相对而言更加自由,程序实现也更加方便。
针对该问题的解决,还研究了多种三维和二维直角坐标转换模型,参见文献[2]。
4 工程实际应用效果评价
4.1 工程概况和测点布置
浦东大道9号桥临时便桥为9号桥原位改建时所建立的临时交通通道,临时便桥为下承式桁架桥,车行道便桥上部结构为多跨连续方案。
图4为纵向观测断面布置。

图4 纵向观测断面布置
由于我单位只有10只可用的棱镜,因此,仅在2、3、4、5、6、7、8、10、11、12 断面单侧布设了棱镜,对应在自动化变形监测软件中的编号为P1~P10,见图2。
4.2 现场测量结果
在该工程中,共计进行了初始值观测和边跨加载、边跨卸载、中跨加载、中跨卸载共计4个工况下的挠度测量。表1为4个工况下的10个观测点的垂直位移人工观测(采用同样的设备和方法)和自动化观测的观测结果比较。
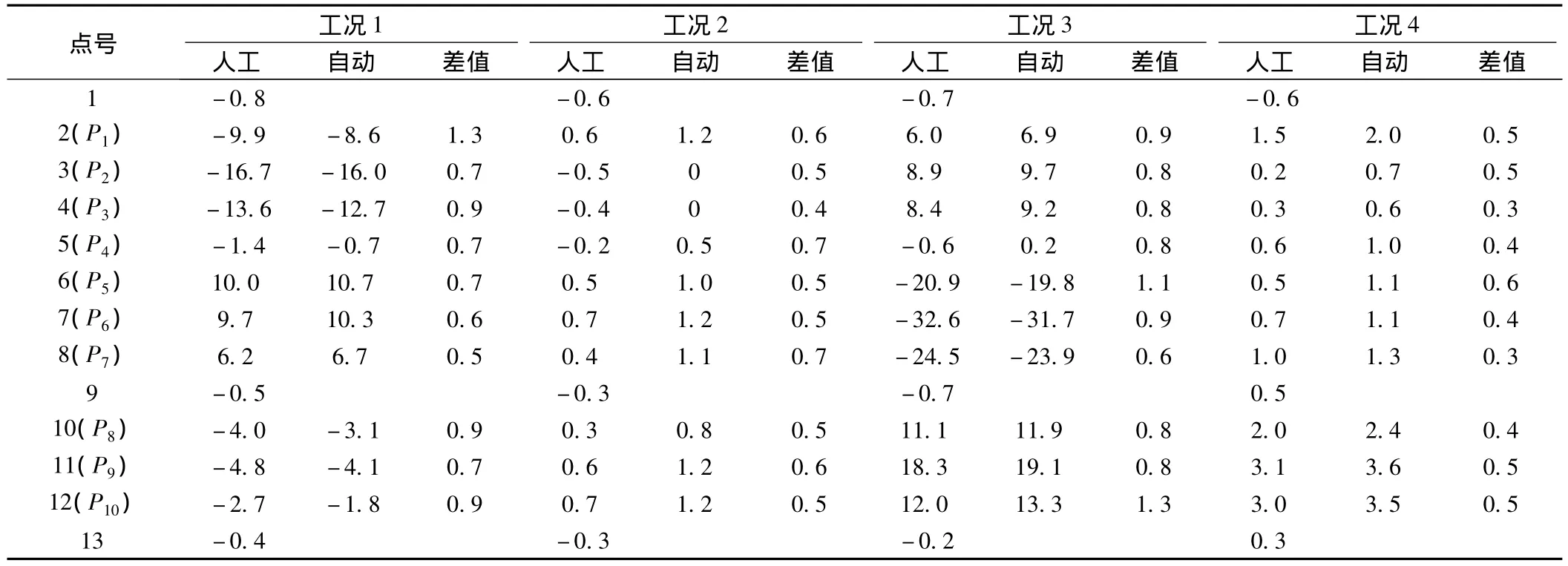
表1 人工观测和自动化观测结果比较mm
图5为4个工况下的10个观测点的垂直位移人工观测和自动化观测的观测结果比较,相对于表格,图形的比较更加直观。
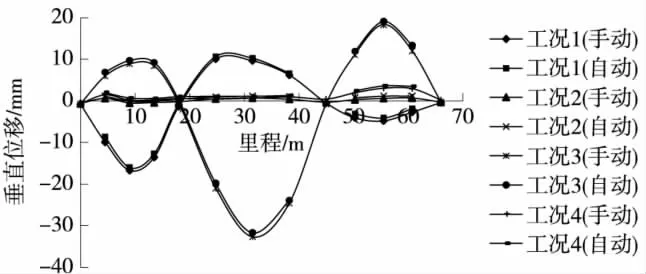
图5 人工观测和自动化观测结果比较
4.3 应用结果比较和分析
从表1和图5的比较可以看出,4个工况下10个点垂直位移的人工和自动观测数据结果基本一致,误差基本都在1 mm以内,最大误差为1.3 mm。
由此可以认为,对于范围不太大(不超过几百米),变形量为亚cm级别及更大的变形测量项目,可以采用自动化变形监测软件控制自动全站仪完成,可取得与人工测量基本一致的测量成果。自动化变形测量在仪器、发射目标(一般为棱镜)布设完成后,其余工作由1人操作仪器即可完成。类似工作如由人工操作,则至少需要3人(观测、记录、司镜,夜间可能还另需照明人员)才可完成。每测量一个周期,人工测量手段约需要15~20 min左右的时间,而自动化测量仅需要10 min不到的时间即可完成。相比较而言,自动化变形测量手段具有明显的技术优势。
5 结束语
分析了当前全站仪自动化变形监测技术的研究背景,国内外的发展现状,总结了研究该系统的必要性。研究了自动化变形监测系统的组成和系统的功能设计,提出了极坐标测量斜距、三角高程、方位角差分改正的必要性和方法,探讨了自动化监测过程中存在的实际问题和解决方法,主要有市场内出现多个目标、目标被遮挡以及测站不稳定等问题。
在一个钢桁架连续梁桥承载力评估的工程实践中应用自动化变形监测系统和人工手段同时进行了测试和比较。结果表明,自动化变形监测系统能够取得和人工测试手段基本一致的数据质量,但是在投入的人力物力和工作效率上都有显著优势,证明了自动化变形监测系统的可行性和优势所在。
[1]张海玲.基于TCA2003全站仪的自动变形监测系统的研制[D].济南:山东科技大学,2005
[2]谷 川.基于自动全站仪的自动化变形监测系统研究与开发研究报告[R].上海:上海市政工程设计研究总院(集团)有限公司,2011
[3]谷 川,秦世伟.南京长江四桥南锚碇深基坑支护结构水平位移监测[J].铁道勘察,2010,36(2):1-4