网络同步RTK定位原理与精度分析
2011-11-29贺俊伟李春华
贺俊伟 李春华 刘 俊 邓 芳
(1.成都市勘察测绘研究院,四川成都 610081;2.四川省地质测绘院,四川成都 610017)

图1 汶川地震灾区CORS基站分布
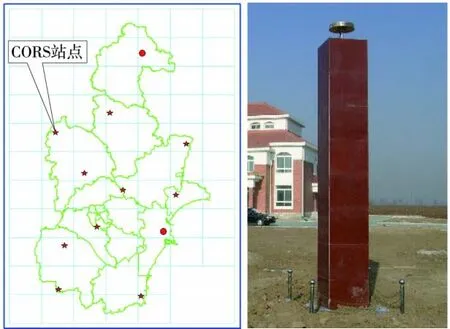
图2 天津市CORS系统分布示意
CORS NRTK(Continuously Operating Reference Stations Network Real-Time Kinematic positioning)是集卫星大地测量技术、通信技术和计算机网络技术于一体的空间信息实时服务技术,整个系统包括连续运行参考站、数据处理与控制中心以及流动用户部分[1]。
目前,我国在多个地区和大中城市已经建成400个左右的CORS(Continuous Operation Reference Stations缩写为 CORS)基站[2],如5.12汶川地震灾区(如图1)、广东省、地震局和气象局的专用CORS系统,以及深圳、上海、北京、天津(如图2)、苏州、成都等城市GPS综合服务系统。
CORSNRTK测量方法(即网络RTK)极大地克服了传统RTK技术作业距离方面的限制,其主要优势表现为:(1)可以实时获取测站精确的WGS84坐标和用户坐标;(2)单台GPS接收机作业模式,减少作业成本,提高工作效率;(3)缩短观测时间(几秒),提高了RTK测量的可靠性和定位精度;(4)其作业范围不仅适合于基准站网所包围的范围,而且可以扩大到基准站网外的一定距离,(5)基准网内和网外一定范围内定位精度均匀[3]。
CORSNRTK测试表明:两次独立初始化的坐标较差、CORS网内与CORS网外(约60 km范围内)网络RTK的绝对定位精度基本一致,平面定位精度(中误差)约 ±3.0 cm,大地高定位精度(中误差)约 ±5 cm[3,4]。
由于每次CORS NRTK测量均为独立观测,每点的精度基本一致,故相邻点之间的相对定位精度不高,难以满足城市日常测量(300 m以内的边长)工作的需要。
在CORS NRTK定位精度的基础上,提出了改善相邻点之间相对定位精度的作业方法和数据处理模型:即同步RTK测量和测边网平差或三维坐标差平差。
1 RTK测量边长相对精度分析
下面就CORSNRTK测量的二维平面精度进行详细的分析。
两点的边长计算公式为

其中,Sij相邻点之间的平面距离;
(Xi,Yi)和(Xj,Yj):RTK 测量并转换后的平面坐标。
线形化后

假设 Xi,Xj,Yi,Yj的中误差相等,均为 ± m,按照误差传播定律,则边长中误差为

取mX=mY=±2 cm,则

如需保证边长相对误差不大于1/1万,则相邻点的距离应不小于280 m,而实际作业中,边长长度(尤其是在城市建成区域内)难以完全满足此项要求。
2 同步RTK测量原理与实验方法
在CORS基站网内,选取八个GPS点,分别采用静态GPS测量、同步RTK测量、非同步RTK测量获取各点的观测信息(三维坐标 B、L、H 或 X、Y、Z)。
观测方法1:静态GPS测量,采用Trimble 5700双频GPS接收机,同步观测45~60 min,同步环之间采用边连接模式,静态GPS观测网见图3。该GPS网中,最长边约为746 m,最短边约为140 m,小于280 m的边长有5条。进行三维无约束平差和二维约束平差计算,获取各点的静态GPS点二维坐标(x,y),并将此坐标作为真值。
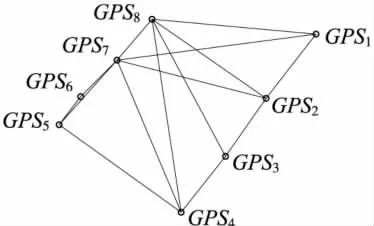
图3 静态GPS观测网
观测方法2:同步RTK测量,每相邻点之间进行同步RTK观测,即RTK观测时间相同,每个同步RTK观测历元约为60个,共获得15条同步观测结果(X、Y、Z),同步RTK观测示意见图4。根据两点之间的同步观测值计算坐标差和边长(改化为平距),并分别按照测边网(观测值为Si)和三维坐标差(观测值为ΔXij,ΔYij,ΔZij)进行平差计算(二维约束条件与静态GPS网一致),获取各点的平面坐标,与静态测量真值坐标进行比较,并统计其精度指标。
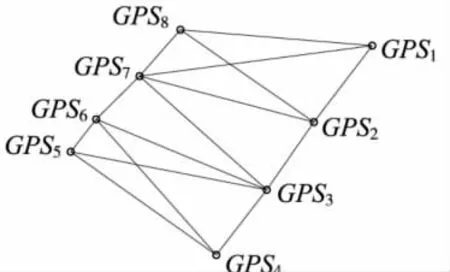
图4 同步RTK观测示意
方法3:采用非同步RTK测量方法直接获取每点的坐标,每点观测历元数为60个。
3 试验结果
以静态GPS数据为基准,按照式(5)分别计算非同步RTK、同步RTK、测边网平差、三维(二维)坐标差平差的相对误差。

共统计10条GPS边长,各边长度和非同步RTK测量各边长相对误差见表1。
从表1可以发现,最弱边相对误差为92.2×10-6,最强边相对误差为5.5 ×10-6,平均相对误差为34.3 ×10-6。
非同步RTK测量相对误差分布见图5。
采用不同数据处理方法计算边长(共10条边)相对误差,各种数据处理方法得到的各条边相对中误差分布见图5(横轴表示边长,纵轴表示相对误差)。统计结果见表2,统计图见图6。
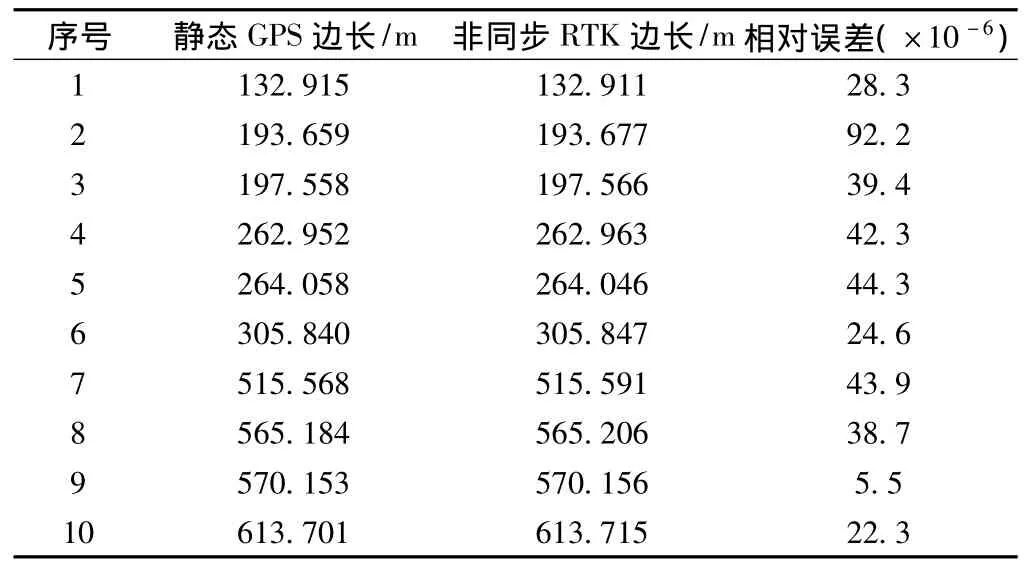
表1 非同步RTK边长相对误差
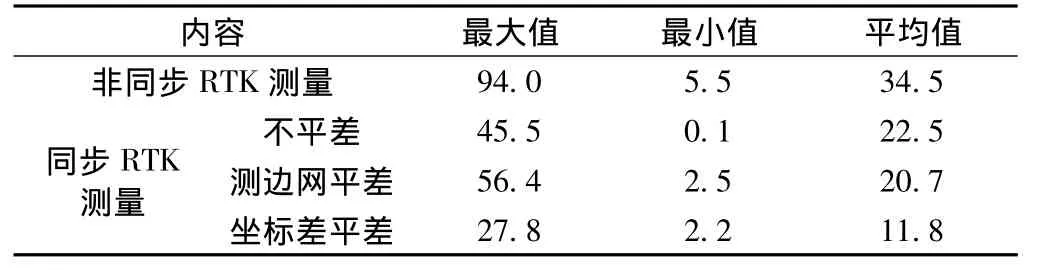
表2 RTK测量相对误差统计 ×10-6
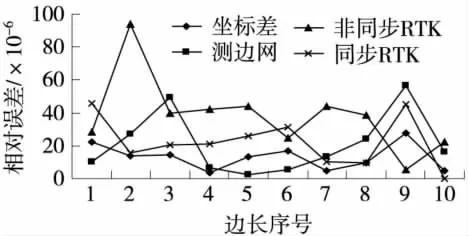
图5 边长相对中误差分布
从图5、图6和表2不难发现,相对误差平均值和最大值大小顺序依次为:非同步RTK→同步RTK(不平差)→测边网平差→坐标差平差。其中,三维坐标差数据处理模式的边长相对精度约为非同步观测的1/3,相邻点之间(短边,边长范围在100~1 000 m之间)相对精度可以达到50×10-6(即《卫星定位城市测量技术规范》中二级GNSSRTK)的技术要求。
在实际控制网加密作业过程中,可采用同步RTK测量模式,或同步RTK测边网平差和三维坐标差平差,以提高控制点间相邻边长的相对精度。
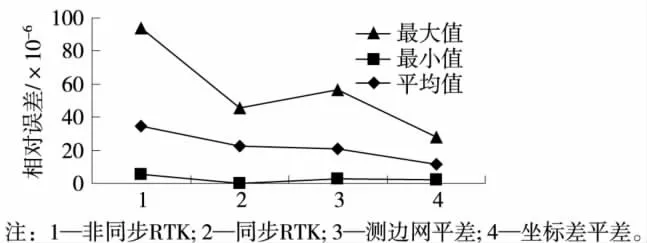
图6 不同数据处理方法的相对误差统计
4 结论及建议
同步RTK测量、或同步RTK测量的间接观测值(边长或坐标差)进行数据处理,可以极大地提高相邻点间的相对精度,可以将《卫星定位城市测量技术规范》(CJJ/T73—2010)中二级GNSS RTK平面测量中相邻点之间的最短距离从300 m缩短为100 m,并可完全取代城市一、二、三级导线测量,极大地拓宽了CORSNRTK的适用范围。
[1]周乐韬.连续运行参考站网络实时动态定位理论、算法和系统实现[D].成都:西南交通大学,2007
[2]中国科学技术协会,中国测绘学会.测绘科学与技术学科发展报告[M].北京:中国科学技术出版社,2010
[3]李春华.基于网络GPS和精化大地水准面的区域实时三维定位理论与应用[D].成都:西南交通大学,2010
[4]韩国超,刘莉萍,李春华,等.NRTK定位原理与性能测试[J].测绘通报,2010(6):30-33.