全站仪在高速铁路水中墩沉降观测中的应用探讨
2011-11-29王建红
王建红
(中铁第一勘察设计院集团有限公司,陕西西安 710043)
1 概述
高速铁路无砟轨道施工前必须进行线下工程沉降变形监测,目的是预测线下工程最终沉降量和工后沉降,合理确定无砟轨道铺设时间,确保铺设质量。在《高速铁路工程测量规范》、《高速铁路无砟轨道工程施工精调作业指南》与《客运专线铁路变形观测评估技术手册》中,对桥梁墩台沉降都有明确要求,大跨度水中墩的沉降监测更是监测的重点和难点。高速铁路线下工程沉降监测的精度要求按变形监测三级执行,相当于国家二等水准测量精度。沉降监测的精度采用二等水准测量的方法都能满足要求。高速铁路线跨越大的河流湖泊时,水中墩的沉降监测实施相当困难,无论从测量方法选择,还是测量场地的布置,跨度小于100 m的墩间距可按《国家一、二等水准测量规范》的常规要求进行施测,跨度连续大于100 m的墩间距无法满足二等水准测量常规方法要求,按规范要求应进行跨河水准观测。但跨河水准测量的条件相当苛刻,并且水中墩的场地无法布置跨河水准观测场地,所有的大跨度水中墩的沉降监测都需根据情况做详细的观测方案。
本文讨论在连续跨度大于100 m的水中墩进行沉降观测的一种实施方案,采用精密全站仪使用中间设站精密三角高程的方法对水中墩进行沉降监测,使用徕卡TCA2003全站仪。TCA2003全站仪的测角精度为0.5″、测距精度为1 mm+1×10-6D,并且具有 ATR棱镜自动照准功能、可编程自动驱动观测的特点,可减少人工操作误差;通过建立中间设站精密三角高程测量数学模型,估算中间设站精密三角高程测量精度,在变化距离与角度情况下与二等水准测量限差进行对比分析,分析实施过程中的操作条件。通过实验数据分析,采用高精度全站仪对连续大跨度水中墩的沉降观测方案是可行的。
2 精度分析
2.1 精密三角高程测量原理
由图1三角高程测量原理示意可知,在A点架设全站仪,从A点观测B点,B点相对于A点的高差为

其中A'为仪器中心,B'为棱镜中心,观测竖直角为αAB,斜距为 SAB,仪器高 AA'为 iA,棱镜高 BB'为 vB,γAB为A点在观测方向上的垂直折光角,H'H=D2/2R为地球曲率对高差的影响,γAB=-K·DAB/2R,K为大气垂直折光系数,R为地球平均曲率半径。
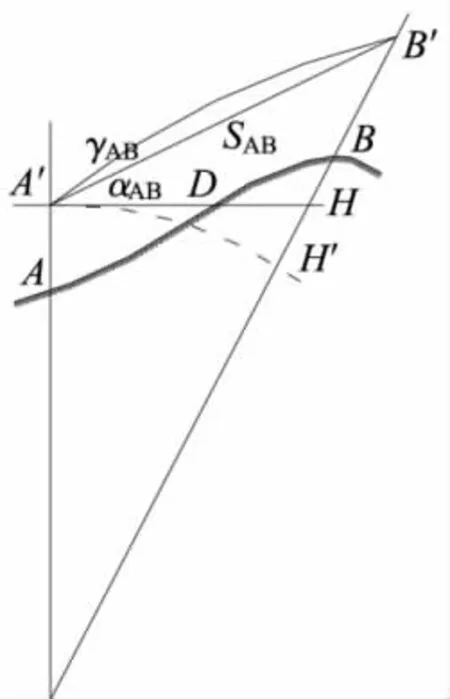
图1 精密三角高程测量原理

图2 中间设站精密三角高程测量示意
2.2 中间设站精密三角高程测量原理
由图2可以同理写出从A点观测C点,C点对于A点的高差为

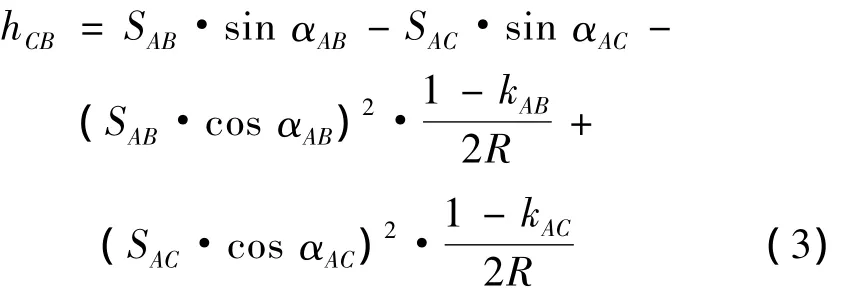
在实际测量中,B,C采用棱镜强制对中标志,测量的棱镜高度无需进行量测,在公式(1),(2)中 νB=νC=0,对公式(1),(2)进行相减得到 CB之间的高差hCB
2.3 中间设站精密三角高程测量精度分析
对(3)进行全微分,根据误差传播定律得到CB点间的高差中误差为

其中mf为大气折光对高差的影响

中间设站要求前后平距尽量相等,即DAB≈DAC=D,前后竖角尽量小并相等,即αAB≈αAC=α,同一台仪器有测距误差相等,测角误差相等,mSAB=mSAC=mS,;对(4),(5)两式整理

或
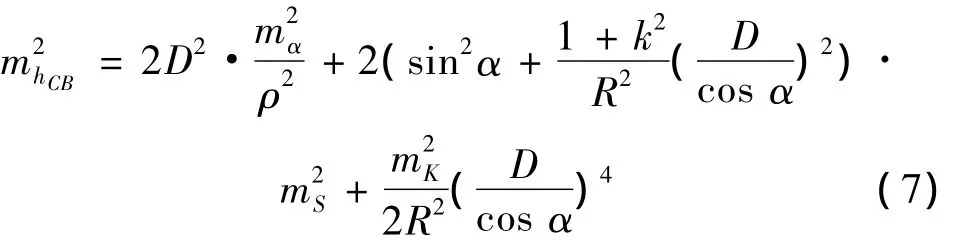
公式(6)为斜距表示的CB点间高差中误差,公式(7)为平距表示的CB点间高差中误差。
在《铁路工程测量》中大气折光系数误差为0.03,一些文献表明,大气折光系数k的中误差约为±0.02~±0.05,本文取最大值mk=±0.05;按两倍的中误差作为测量限差,距离取L=2D,我国二等水准测量的相邻水准点间高差限差4表1是每站固定平距与角度时,采用TCA2003全站仪的测角精度为0.5″、测距精度为1 mm+1×10-6D,大气折光系数 k =0.14,大气折光系数中误差mk=±0.05,中误差与二等水准限差的一半的比较情况。

表1 每站高差中误差表与二等水准限差对照 mm
《高速铁路工程测量规范》中,要求中间设站三角高程的测回数为4个测回,垂直角测回间较差小于5″,前后视距差要求小于5 m,距离测量的测回内,测回间的较差小于2 mm,距离不超150 m;从表1中的数据对比可以看出在距离小于400 m,竖角小于10°的情况下可以满足限差要求,在实地场地布置的时候尽量控制前后视距基本相等;在测量过程中增加测回数,提高测角的精度;控制竖角足够小并且前后竖角基本相等,可减小大气折光与地球曲率对高差精度的影响,表1中的精度估算是可靠的。
3 实验分析
3.1 现场概况
某条在建高速铁路穿越某河流,有4个桥墩在河流中间,并且中间三跨距离都连续在120 m以上,靠近岸边的桥墩离岸距离也将近100 m;垂直位移变形观测采用二等水准测量的方法施测,桥梁沉降变形监测点之间的测量满足不了跨河水准测量的场地布设要求,现场情况如图3所示。

图3 现场情况示意
3.2 方案研究
为了进行正常的沉降变形监测,探讨研究采用中间设站三角高程方法,使用高精度全站仪TCA2003进行测量的方案,其中沉降监测点与工作基点都采用强制对中标志(如图4所示),测量时使用开发的全站仪自动观测程序。在沉降监测的在桥墩垂直线路两侧修建架设全站仪的工作平台,墩身埋设强制对中观测标志,标志高度与全站仪架设高度等高,工作基点的高度埋设时与沉降监测标志基本同高。工作基点在位置选择好后,采用二等水准测量方法进行测量,河两岸的工作基点应进行联测,单独完成监测网建立工作。工作基点水准测量采用图4中高程连接杆,使用全站仪三角高程测量时采用图4中棱镜连接杆,工作基点的高程严格归化到棱镜中心。桥墩变形监测点全部采用图4中棱镜连接杆。
桥墩的沉降监测标志分左、右线分别进行观测,以右侧为例,首先在G1,J2,J4设站,观测 A、J1、J3、D之间的高差;再在J1,J3,D2设站,观测A、J2、J4、D之间高差,形成两条路线。每个设站调整仪器高度进行两次独立观测,两次独立观测形成往返测量。
3.3 实验数据
在岸上选择合适位置按3.2中的观测方案,进行了测量方案的场外实验,中间距离设计为160 m左右,靠近岸边的距离为100 m左右,两次单独设站的高差都小于1 mm,往返较差如表2所示。
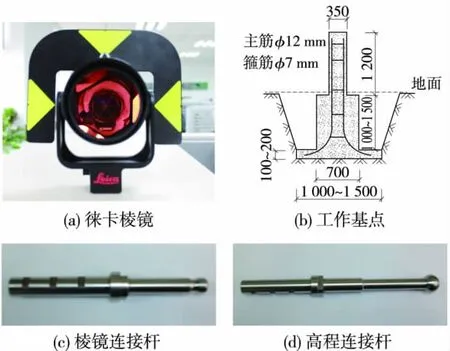
图4 测量配件示意
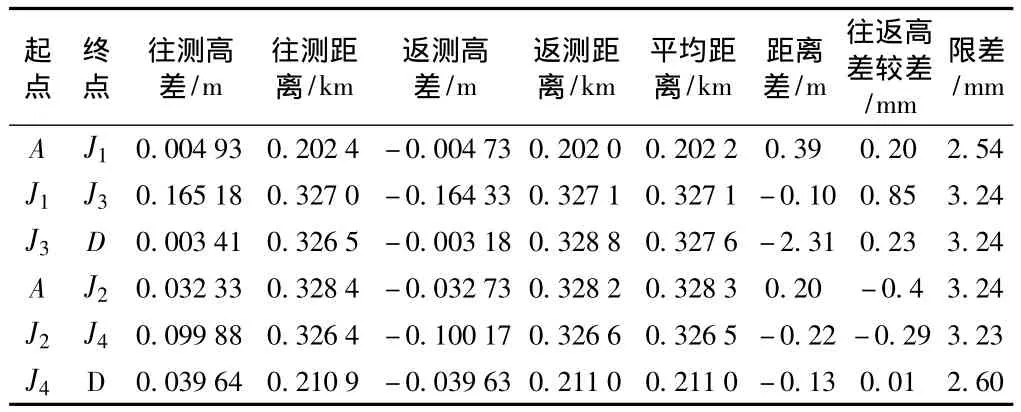
表2 往返高差较差
对观测数据进行平差,平差的高差平差值及其精度如表3所示。
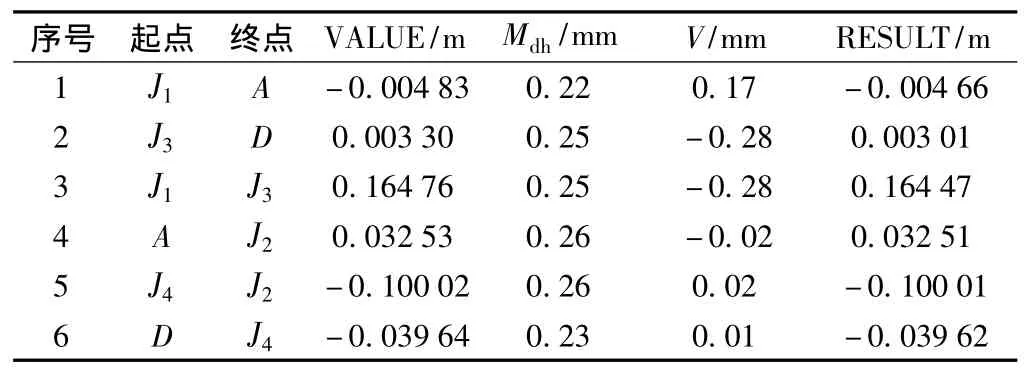
表3 高差平差值及其精度
平差完后的高程平差值及其精度如表4所示。
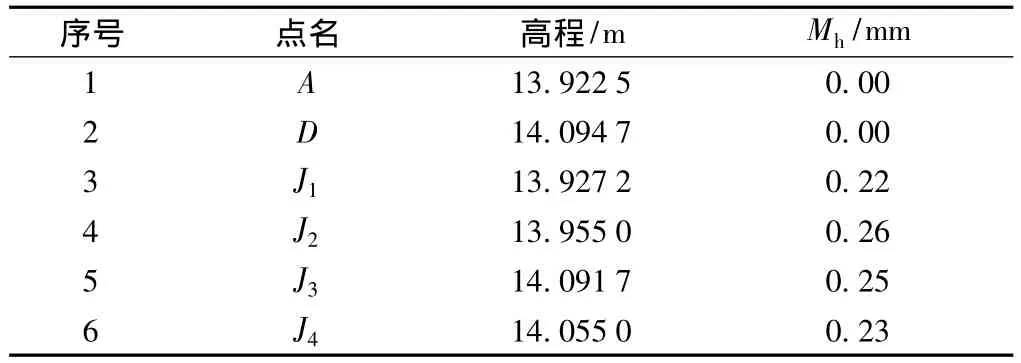
表4 高程平差值及其精度
《建筑变形测量规范》中三级垂直位移变形测量与《高速铁路工程测量规范》三等垂直位移变形监测中对变形点的高程中误差限差为1 mm,相邻变形点的高差中误差为0.5 mm,从表3、表4中的平差数据可以看出,各项精度指标满足规范要求。
3.4 观测注意事项
(1)为了减小折光的影响,最好选择阴天进行观测,垂直角观测宜在日出后2 h至日落前2 h期间目标成像清晰时进行。
(2)测回数在4个测回以上,强制对中标的重复安装误差小于0.2 mm。
(3)进行观测时的温度气压严格记录输入,温度精确到0.2℃,气压0.5 hPa。
(4)仪器设站位置每次严格固定,并且前后视距差不宜大于5 m,两次设站所测高差之差应小于1 mm。
(5)观测线路设计中,尽量减少设站数或减少线路距离,有利于精度控制,避免远离工作基点的变形监测点的高程平差精度超限。
[1]TB 10601—2009/J 962—2009 高速铁路工程测量规范[S]
[2]JGJ8—2007/J719—2007 建筑变形测量规范[S]
[3]TB 10101-2009/J961-2009 铁路工程测量规范[S]
[4]铁建设函[2009]674号 高速铁路无砟轨道工程施工精调作业指南[S]
[5]工管技[2009]77号 客运专线铁路变形观测评估技术手册[S]
[6]李青岳.工程测量学[M].北京.测绘出版社,2001
[7]晏红波,黄 腾,邓 标.智能全站仪精密三角高程测量替代二等水准测量[J].水电自动化与大坝监测,2007,31(4)
[8]郭春喜,阳海峰.精密三角高程替代二等水准的可行性研究[J].测绘信息与工程,2010,35(2)
