单轴挠性卫星快速机动试验台
2011-11-27饶卫东徐李佳
饶卫东,徐李佳
(北京控制工程研究所,北京100190)
RAO Weidong,XU Lijia
(Beijing Institute of Control Engineering,Beijing 100190,China)
单轴挠性卫星快速机动试验台
饶卫东,徐李佳
(北京控制工程研究所,北京100190)
为了验证挠性卫星快速机动控制方法,搭建单轴挠性卫星快速机动试验平台.该平台基于单轴气浮台,令柔性板的挠性频率和刚挠藕合系数与真实卫星的接近.平台充分模拟了卫星在太空中的失重和无阻尼环境,被激发的挠性振动在开环情况下衰减很慢,特别适合挠性卫星姿态快速机动试验.初步的试验包括挠性参数辨识试验和姿态快速机动PD控制试验,仿真结果表明升级后的平台将可以验证快速机动控制方法.
试验台;挠性卫星;快速机动
RAO Weidong,XU Lijia
(Beijing Institute of Control Engineering,Beijing 100190,China)
随着卫星挠性附件尺寸的变大和有效载荷对卫星姿控系统要求越来越高,卫星挠性附件对整星姿态的干扰日益受到重视,尤其是卫星快速机动时挠性附件的控制的是重点需要考虑的问题.
挠性卫星姿态控制地面试验一般采用干扰力矩很小的气浮轴承作为平台基础,同时试验台的电源与气路供给是独立的,一般采用蓄电池供电和储气瓶供气.这些试验平台在试验室比较常见,加州理工大学三自由度卫星姿态控制系统仿真装置[1],采用气浮球轴承,可以绕水平x和y轴旋转30°,垂直轴z轴360°旋转.北京控制工程研究所的小型三轴气浮台、大型三轴气浮台[2-3]亦被应用在卫星控制系统仿真中.
挠性卫星姿态控制地面试验有诸多的难点:首先地面试验是在空气环境下开展,和真实的太空环境有一定的差距.其次,地面试验没有太空的微重力环境,势必会受到干扰力矩的影响.这些都使得地面试验的挠性模拟板的尺寸受到限制,太空试验的低阻尼和低频率振动很难完全模拟.
国内外地面试验方面已经有了较多的研究,Camp等[4]设计了一种细长杆模拟挠性振动,空气阻尼比很小.从输入信号的频率响应特性上分析了输入成形方法的有效性,并且在实验台上对挠性对象用该方法进行了控制仿真.仿真结果表明,使用基于单模态的输入成形方法控制实验台,90%左右的振动得到抑制.Choongseok等[5]引入自适应滤波方法研究挠性卫星单自由度姿态快速机动控制.试验台由中心刚体和挠性模板组成,控制机构为安装在中心刚体的动量轮,测量机构为挠性附件上的振动传感器.试验中控制算法实时辨识模态参数,实时更新滤波器参数和控制器参数以控制中心刚体的运动.
解永春等[6]针对挠性卫星的快速机动提出了自适应控制方法,并提出了喷气方法物理仿真试验.文中提出了一种逻辑微分控制方法,能够自适应地阻尼对象的振动,并且具有好的鲁棒性.周军等[7]针对挠性卫星快速机动提出了变结构控制方法,并在单轴气浮台上进行仿真,验证了该方法.变结构方法对于能量的消耗较大,尤其不适合喷气模式下的姿态控制.
本文基于单轴气浮台,设计适合地面试验的挠性模板,并配备相应的敏感器和执行机构,组成挠性卫星快速机动控制试验平台,仿真结果表明,这种升级后的平台可以用于快速机动控制方法的验证.
1 试验平台组成
1.1 信号流程
整个系统的信号示意图如图1所示,利用工控机模拟星载计算机,操作台计算机模拟遥测遥控计算机.在操作台计算机和工控机上,利用Visual Studio开发相应的操作和接口软件.其具有友好的界面,允许用户方便地进行物理实验.

图1 数据采集及控制系统组成简图
操作台计算机可以同步得到姿态角、姿态角速度、动量轮输出和动量轮转速等数据;同时,用户通过一些命令操作,可以实施硬件测试和不同控制方法的控制试验.
测量元件有的集中在中心刚体上的同步感应器和速率陀螺,也有的分布在挠性板上的加速度计(待装).执行机构有动量轮,辅助以喷气控制(待装).
平台附着在气浮轴承上,同外界没有任何有线连接,台上测控计算机可以完全独立地处理包括本体及附件的所有测量及执行部件的输入输出数据,并能自主地进行控制算法计算,因此能够较好地模拟航天器在轨独立运行的模式.
1.2 关键指标
1)单轴气浮台:用于仿真卫星主体单轴姿态运动,气动干扰力矩大约为0.001N·m,台体搭载全部设备后转动惯量约为10~30kg·m2.
2)挠性功能模板:用于仿真卫星太阳帆板、天线等挠性附件.采用宽度为50~150mm、厚度为2~3mm、长度为1.8~2.4m的铝板或钢板,可以模拟不同刚挠耦合系数,不同振动频率和阻尼比的挠性振动.
3)冷气喷气装置(待装):由高压气瓶组、减压阀、正反向冷气喷嘴及相应电磁阀和控制线路组成.可由台上测控计算机控制电磁阀开关,选择正反向喷气,所产生的控制力矩大小约为0.4N·m.控制力矩大小不可调,喷气时间可以调节.
4)加速度计(待装):安装在挠性功能板末端,测量模板的挠性振动.
5)动量轮系统:大力矩飞轮控制刚性主体,输出力矩范围为-0.5~0.5N·m.
6)陀螺组件:测量本体姿态角速度,输出精度0.005(°)/s.
7)感应同步器:测量气浮台垂直轴角位移,精度为0.00025°.
挠性卫星快速机动试验,即试验台在30s内完成30°机动,并且姿态机动完成后姿态角速度达到0.0001(°)/s.由于挠性模板和中心刚体的耦合较大,使得试验台快速机动过程中,激发的挠性振动对中心刚体姿态的影响很大.姿态机动完成后,整个试验台的姿态角速度将处于振荡衰减状态.
试验模拟的是卫星在轨期间的姿态快速机动时的挠性振动,尤其要模拟太阳帆板的前几阶模态带来的振动.为了使挠性频率要做到尽量小以接近真实卫星,则板子的厚度要尽量小,长度尽量长.而且板子的材料一般选用金属材料,要求弹性模量小,密度大.经过多方面综合考虑,板子的尺寸选为1800mm×150mm×3mm,材料为钢或铝时可以满足一阶挠性频率在0.5Hz左右的要求.
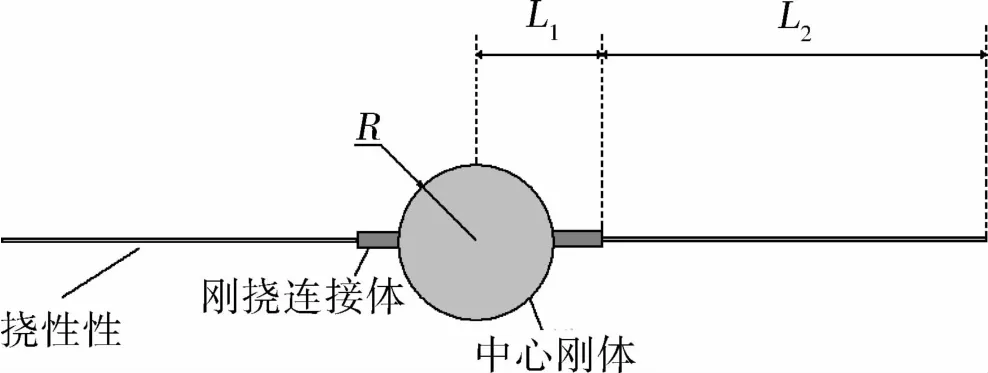
图2 试验平台示意图
图中,L1是挠性板近端距中心的距离,L2是挠性板长度,R是试验台半径.采用混合坐标法,式(1)描述了试验平台动力学模型(考虑空气阻力):

式中,θ为中心刚体姿态角,qi为挠性广义坐标,ωi分别为挠性广义阻尼和频率,Ci为耦合系数
试验台要在一定时间内完成大角度姿态机动,执行机构的能力需要计算,按照式(2)计算需要的最小力矩Tmin:

经过计算,当挠性钢板或铝板尺寸为1800mm×150mm×3mm时,快速机动需要的最大力矩都不超过动量轮的最大输出力矩.
2 初步试验结果
2.1 参数辨识试验
经过调试,挠性卫星快速机动试验平台搭建完毕,并进行了初步的姿态控制试验.两个地面试验安装的挠性板尺寸为1800mm×150mm×3mm.
第一个试验是卫星动力学参数辨识试验,由冲击响应的输出数据辨识,采用了两种辨识方法进行试验.

图3 参数辨识试验
黎康等[8]提出的子空间方法,特别适合卫星在轨期间的辨识,该方法仅需要输出信号.
FFT方法适合求解待辨识信号的频谱曲线,使用峰值拾取法可以求得试验对象的振动频率.计算量小,物理意义明确,所以在工程上已大量使用.
辨识结果见表1,从前两阶频率的辨识结果来看,两种算法基本一致,和理论计算都有10%左右的误差.

表1 参数辨识结果对比
2.2 姿态机动试验
第二个试验是姿态快速机动PD控制试验,参考曲线是30s机动30°的正弦曲线.忽略挠性动力学的影响,保留刚体动力学部分,依据经典控制理论的极点配置理论设计PD控制器参数.
快速机动过程中,挠性振动被激发,使得试验平台完成姿态机动后,振动幅度较大,而且由于自身阻尼很小,所以振动很难衰减.姿态机动后70s时的姿态稳定度为0.05(°)/s,图4是物理仿真的试验结果.
该试验结果表明,PD控制方法没有达到预期结果(30s内机动30°,且姿态稳定度达到0.0001(°)/s.控制效果不好的原因主要有:
(1)执行机构(动量轮)存在较大惯性环节,整个控制环路的带宽受到限制.
(2)试验台本身测量精度不高,角速度测量仅达到0.005(°)/s,陀螺精度有待于进一步提高.
(3)控制方法(PD)的设计忽略了挠性动力学,控制方法没有考虑挠性振动的主动抑制.
执行机构如果换成喷气,则可以提高整个带宽,可以用喷气-动量轮进行联合控制试验.另外,从角速度输出细节看,感应同步器输出信号有一定的噪声,在后续的试验中需对其滤波.
3 结 论
挠性卫星快速机动试验平台已搭建完成,该平台很好地模拟了太空的低阻尼环境.初步的结果显示该平台反映了挠性振动的控制难点,即挠性振动易被激发,且很难被控制方法衰减.

图4 姿态机动试验
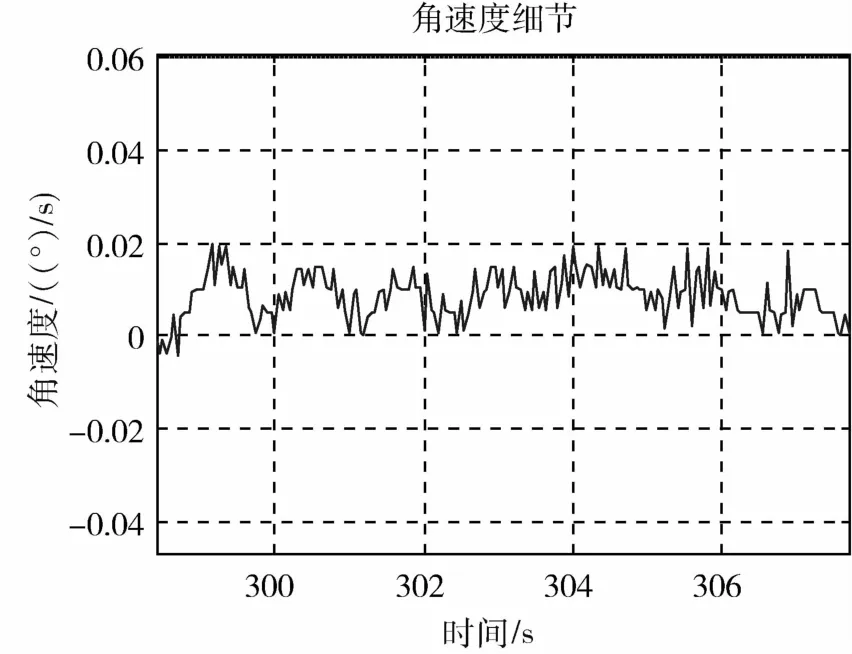
图5 角速度曲线
试验台设备需要进一步被完善:测量角速度的陀螺精度有待提高;感应同步器输出信号需经过滤波处理;测振的加速度计也要加入试验台.
试验台设备完善以后,将大幅度提高该平台的性能,将能更好地验证挠性卫星快速机动的控制方法,包括被动控制方法和主动控制方法.
[1] Dongwon J,Panagiotis T.A 3-DoF experimental testbed for integrated attitude dynamics and control research[C].AIAA Guidance,Navigation,and Control Conference and Exhibit,Austin,Texas,August 11-14,2003
[2] 李季苏,牟小刚,张锦江.气浮台在卫星控制系统仿真中的应用[J].航天控制,2008,26(5):64-68
[3] 李季苏,牟小刚,周军等.挠性结构振动特性测试及振动抑制仿真试验研究[J].控制工程,1996(2):13-19
[4] Camp J,Banerjee A.Vibration suppression using fixedinput pulse modulation:analysis and experiment[C].AIAA Guidance,Navigation,and Control Conference and Exhibit,San Francisco,California,August 15-18,2005
[5] Choong seok O,Hyochoong B,Jong-Oh P.Vibration control of flexible spacecraft under attitude maneuver using adaptive controller[C].AIAA Guidance,Navigation,and Control Conference and Exhibit,Keystone,Colorado,August 21-24,2006
[6] 解永春,牟小刚,吴宏鑫,等.挠性航天器大角度机动的全系数自适应控制[J].宇航学报,1999(2):1-7
[7] 周军,李季苏,牟小刚,等.挠性卫星振动抑制的变结构主动控制方案及试验研究[J].控制工程,1994(2):7-12
[8] 黎康,张洪华.仅利用输出信号的挠性航天器模态参数子空间在轨辨识算法[J].航天控制,2005,23(2):27-30
A Simulation Test-Bed for Rapid Maneuver Experiment of Flexible Satellite
A test-bed for satellite rapid maneuver is established to verify various control methods.The testbed is based on the single-axis air bearing bed with its flexible parts'frequencies and coupling coefficients close to real satellites.It can be used to simulate the space environment of weightlessness and light damping in which the excitated vibration attenuates very slow ly under the condition of open loop,so it is especially suitable for flexible satellite rapid maneuver experiments.There are two finished experiments including parameter identification of elastic modes and attitude rapid maneuver based on the PD method.Simulation results are used to verify the effectiveness of the upgraded test bed for rapid maneuver experiment.
simulation test-bed;flexible satellite;rapid maneuver
V448
A
1674-1579(2011)05-0059-04
10.3969/j.issn.1674-1579.2011.05.013
2011-05-20
饶卫东(1985—),男,江西人,博士研究生,研究方向为航天器自适应控制(e-mail:raw1985@sina.com)
