神舟八号飞船交会对接制导、导航与控制系统及其飞行结果评价
2011-11-25解永春胡海霞张维瑾
胡 军,解永春,2,张 昊,于 丹,胡海霞,2,张维瑾
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
神舟八号飞船交会对接制导、导航与控制系统及其飞行结果评价
胡 军1,解永春1,2,张 昊1,于 丹1,胡海霞1,2,张维瑾1
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
介绍神舟八号飞船交会对接制导、导航与控制系统的组成和工作原理,交会对接任务阶段划分,系统实现需关注的问题,以及神舟八号飞船与天宫一号目标飞行器首次交会对接飞行试验的结果和评价.
神舟八号飞船;交会对接;制导、导航与控制;飞行结果
2011年11月1日至17日,中国实施了神舟八号飞船与天宫一号目标飞行器首次空间交会对接任务,分别于2011年11月3日、14日实施了两次交会对接.在首次交会对接任务中,神舟八号飞船制导、导航与控制(GNC)分系统出色完成了各阶段的飞行控制任务,特别是自主交会对接控制段实现了准确测量和精确对接,这是中国在空间控制领域的重大技术突破,是中国空间技术发展的重要里程碑.
神舟八号飞船制导、导航与控制分系统在交会对接任务中起主导作用.本文介绍神舟八号飞船交会对接制导、导航与控制系统的组成和工作原理、交会对接阶段规划、需关注的系统实现问题,最后介绍神舟八号飞船与天宫一号目标飞行器首次交会对接飞行试验的结果和评价.
1 交会对接GNC系统设计
1.1 系统组成及工作原理[1-2]
神舟八号飞船交会对接GNC系统由敏感器、控制器、执行机构与飞船本体动力学和运动学一起构成闭环控制回路,如图1所示.其组成部件包括:由陀螺组合件和加速度计构成的惯性测量单元(包括液浮IMU和挠性IMU),高精度加速度计,光学姿态敏感器(包括红外地球敏感器、数字式太阳敏感器、模拟式太阳敏感器和0-1式太阳敏感器),相对导航敏感器(包括差分卫星导航设备、微波雷达、激光雷达、CCD光学成像敏感器),控制器(包括主控制器和备份控制装置),接口装置(包括轨道舱数据综合线路、返回舱接口装置和推进舱接口装置),执行机构包括推进舱和返回舱喷气执行机构、太阳帆板驱动机构,它们依靠接口装置与控制器相连.此外自动控制系统能通过测控系统接收地面遥控指令和注入数据以及向地面下传GNC分系统遥测信息,还可接收数管分系统的程控指令和总线指令以及空-空通信机的信息.系统具有独立管理和控制功能的软件,GNC控制器的软件包括系统软件和应用软件.
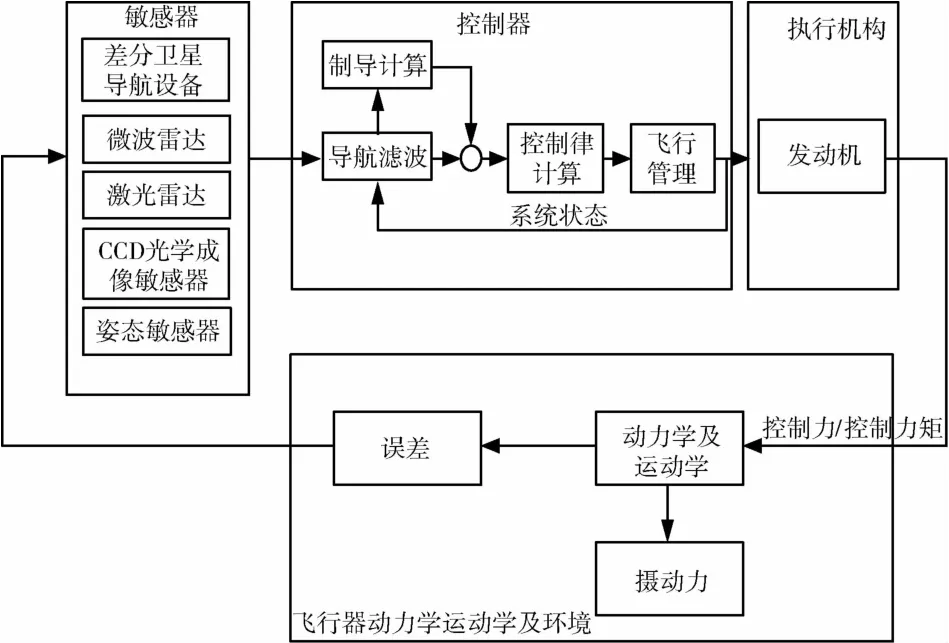
图1 交会对接GNC系统组成及工作原理框图
交会对接GNC系统工作原理概括来讲是控制器利用IMU和各光学敏感器的测量信息,进行敏感器漂移估计和飞船姿态确定,依据注入或卫星导航设备提供的数据进行轨道计算,按照姿态控制律向推进分系统发出控制指令,完成各阶段正常运行和故障情况下姿态控制任务;利用地面支持下的注入信息,以闭路控制方式完成远程导引段的轨道控制及维持任务;利用帆板上的模拟式太阳敏感器或电源分系统反馈的帆板转角信息,实现太阳帆板对太阳的捕获和跟踪.利用IMU和各光学姿态敏感器、交会对接敏感器的测量信息,自主进行相对位置和姿态的六自由度导航计算,生成制导律和姿态控制律后向推进分系统发出控制指令,产生控制力和控制力矩,从而完成交会及撤离段的制导、导航与控制任务,同时根据相关信息,辅助对接机构分系统完成对接段的捕获任务.
1.2 交会对接阶段划分[1]
飞船与目标飞行器的交会对接从距离上讲是一个由远及近的过程,从精度上讲是一个由粗到精的过程.根据任务要求、轨道设计、地面测控站的配置以及飞船上交会对接测量部件的性能,飞船交会对接过程可划分为以下四个阶段:交会段、对接段、组合体运行段、撤离段.交会段又分为远程导引段和自主控制段.远程导引段的变轨通过地面注入指令实施.自主控制段的交会对接任务依靠船上GNC分系统自主完成.自主控制段又分为寻的段、接近段、最后平移和靠拢段.自主控制段设计了5km、400m、140m、30m四个停泊点,用于交会对接敏感器切换和交会对接状态检查.
远程导引阶段的主要任务是由地面测量飞船和目标飞行器的轨道数据,在地面测控网的导引下,飞船经过五次变轨机动,完成半长轴调整、相对相位调整、轨道倾角和升交点误差修正,从初始轨道变为与目标飞行器共面、且其高度略低于目标飞行器的近圆轨道.
寻的段的主要任务是飞船根据船上相对导航敏感器的输出数据自主完成相对导航计算、制导律计算和控制量计算,自主完成轨道控制.经过若干次轨道控制后,飞船进入与目标飞行器相同的轨道上,即与目标飞行器共面、且高度与目标飞行器相同,但在目标飞行器后面5km处.
接近段的任务是捕获对接走廊.对接走廊是以目标飞行器对接轴为中心的一个圆锥,半锥角8°.接近段安排了400m和140m处的两个保持点.
最后平移和靠拢段的任务是为对接提供初始条件.最后平移和靠拢段安排了30m处的一个停泊点.针对帆板挠性大、羽流干扰严重、系统时延大、姿态和轨道耦合的问题,根据《基于特征模型的智能自适应控制》[3]理论,设计了基于特征模型的相平面自适应控制方案,飞行试验结果表明该方案可以很好地实现对接前两航天器相对位置和相对姿态的高精度控制.
1.3 系统实现过程中重点关注的问题
(1)GNC分系统配置及冗余方案[1-2]
GNC分系统配置遵循“一次故障—工作,二次故障—安全”的系统冗余配置原则,在全任务层面上确保交会对接任务成功.交会对接GNC分系统的配置及其冗余方案见表1.
(2)合理的信息体系结构规划[2]
在分析各敏感器数据时序及频率的基础上,采用星形LTU的信息体系结构,保证GNC控制器始终处于主动方,尽可能少的占用系统资源.
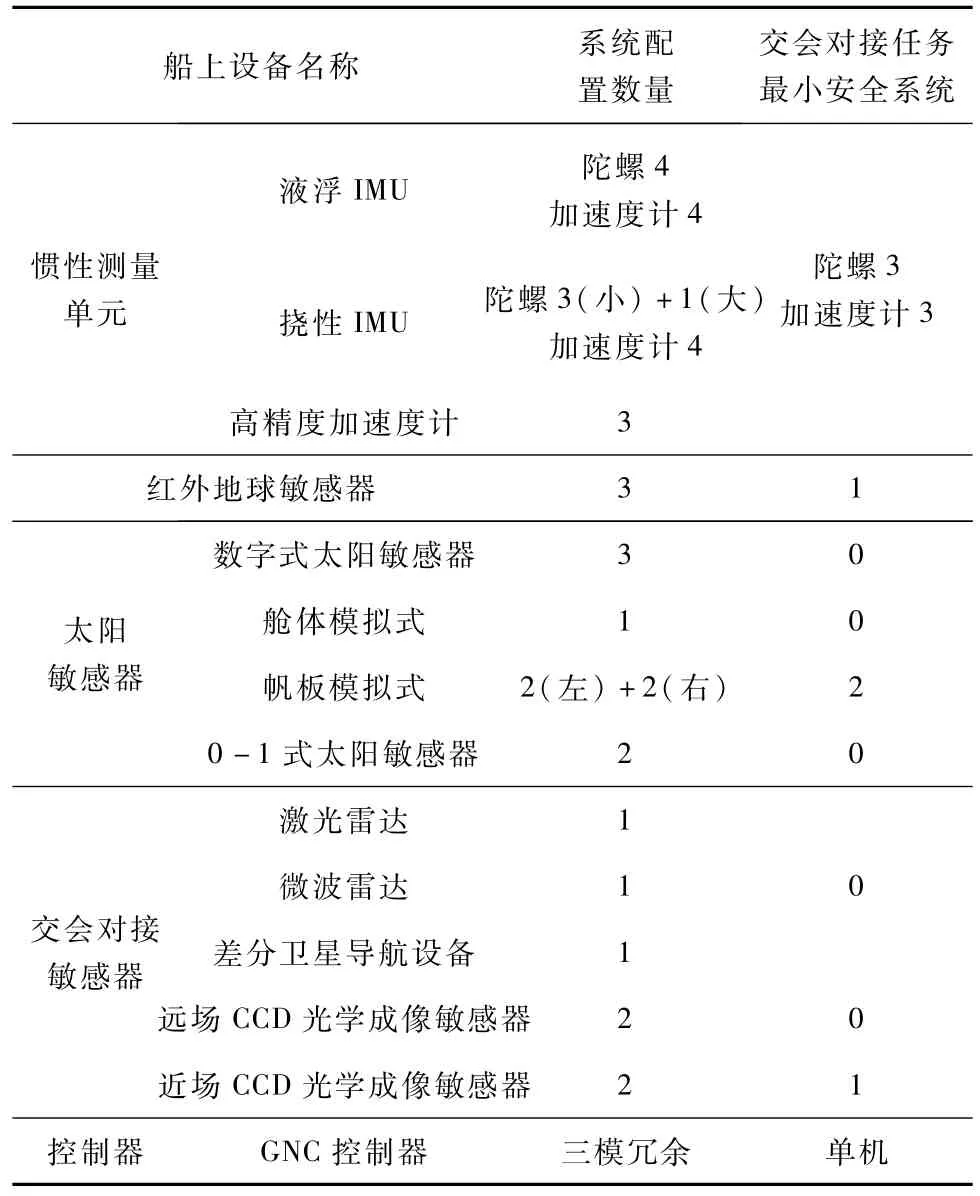
表1 交会对接GNC分系统的配置及冗余方案
异步通信过程需要控制器的CPU进行干预,控制器发送采样命令后需要等待回传的数据.控制器采用单字节接收方式,从接口形式上可区分为射随方式异步串行接口和平衡式异步串行接口,对于一般性或实时性要求不高且数据量不大(小于30字节)的敏感器(如太阳敏感器、红外地球敏感器),采用射随方式异步串口,并选择相对较低的波特率;对于实时性要求较高且数据量不大(小于30字节)的敏感器(如惯性姿态敏感器、微波雷达、激光雷达),采用平衡式异步串口,并选择相对较高的波特率,同时为满足实时性要求,控制器还为其提供同步信号,并且同步信号提前于控制周期保证敏感器采样时刻能提前串口通信时刻.
同步通信可通过设计逻辑时序电路,实现CPU不参与数据传输的过程,它适用于大数据量(大于30字节)传输,从接口形式上可区分为非平衡方式同步串行接口和平衡式同步串行接口.对于实时性要求较高且波特率较高(大于16Kbit/s)的设备(如CCD光学成像敏感器、空-空通信)选用平衡式同步串行接口,对于实时性要求一般且波特率较低的设备(如注入、工程数字量遥测),选用非平衡方式同步串行接口,同时保证其传输过程的波形不失真,采用电平比较接收,以提高系统可靠性.
(3)满足任务特点的系统重构方式[2]
在实现飞船与目标飞行器交会的过程中,随着两飞行器相对距离及工作模式的变化,为使系统能够满足电源约束要求,自主实现系统构型,在供配电方式上,采用系统集中、部件分散的供电模式,可通过自主导航和程控时间实现系统加断电功能.
但系统对冗余的敏感器不采用供电切换方法,而采用软件管理方式.GNC控制器根据当前阶段不同任务采集相应敏感器(包括有故障的敏感器)的输出信息,根据敏感器自检状态,并综合系统信息,按规定的故障诊断逻辑,分析敏感器信息的有效性,剔除被怀疑有故障的敏感器信息,自主实现对敏感器的信息冗余管理;当故障状态超出软件需求规定时,可通过地面注入数据指定敏感器信息和执行机构,实现系统重构.
(4)高可信度软件设计[4]
GNC控制器应用软件作为交会对接任务的重要组成部分,总代码约为17万行,属超大规模星载嵌入式软件,具有控制模式多、功能复杂、时序要求严格等技术难点.
软件设计过程中,考虑交会对接模式可重复性,采用树形结构模式管理,保证程序能按照各种指令和预定程序进行各模式之间的灵活切换;设计合理的指令响应和清除逻辑,避免指令重复响应;对递推计算产生的相对导航和姿态估计等计算结果,进行数据异常检查,检测到错误数据时,能够进行数据恢复;对于分离触点等重要的位口信息,为防止硬件(如继电器)开关触点瞬间抖动,或硬件摩擦过渡状态(机械进程开关)误判,采用设计合理的时间查询方法.
(5)交会对接敏感器地面验证[2]
结合GNC分系统方案设计和交会对接轨迹特点,针对系统分解的交会对接敏感器性能指标要求,进行相对导航敏感器地面验证规划.
动态性能验证:在联合校飞试验、飞艇挂飞试验、外场跑车试验中,根据交会对接过程,进行运动轨迹规划,结合敏感器特点设计典型工况,在动态条件下验证敏感器的测量范围、测量精度、捕获时间、切换时间等关键性能指标.针对试验发现的微波雷达动态响应不足等多项问题,提出解决措施并完成更改验证.
边界条件验证:在直升机挂飞试验、外场威力试验、微波雷达暗室试验中,对远距离、大角度、高动态等边界条件性能指标进行了重点验证.
环境适应性验证:对激光雷达假目标和微波雷达多径效应问题,设计了专项验证试验,给出了缓解办法.针对CCD光学成像敏感器的杂光干扰问题,通过试验确认了目标飞行器表面的光学反射特性,以及CCD光学成像敏感器对目标飞行器在不同阳光照射角度下的适应能力.针对CCD光学成像敏感器在强阳光反射试验中发现的问题,在系统级采取表面包覆黑色阻燃布来缓解阳光反射;在单机级对进一步提高CCD像机滤光片非工作谱段的截止深度进行攻关;在算法上联合国内相关高校对复杂背景下的图像处理和目标识别技术进行合作攻关.通过“设计—验证—改进—再验证”的反复迭代过程,保证单机在系统中的功能和性能满足交会对接使用要求.
为考核、验证、研究交会对接最后平移靠拢段的精度、测量设备工作状态以及系统设计,研制了交会对接九自由度半物理仿真试验系统,它由九自由度运动模拟器、仿真计算机、试验控制台、太阳模拟器以及飞船与目标飞行器的相关交会对接设备组成,用来验证CCD光学成像敏感器、激光雷达、TV摄像机动态指标、切换功能与性能指标,验证自动交会对接系统方案与软件实现,验证人控系统方案与软件实现,模拟和研究运动过程中的光干扰和敏感器切换等问题,为在轨交会对接提供了充分的地面试验数据.
2 飞行试验结果及评价
2.1 任务简介
2011年11月1日飞船准时发射,船箭分离后,飞船根据发射段最后一次计算的飞船本体坐标系相对于轨道坐标系的姿态角作为初值,执行消初偏模式并正常转入对地三轴稳定模式.飞船运行第2圈,在喀什站进行平移发动机正向和反向试喷,确认主份发动机工作正常.第5圈在远望六号测量船监控下,正确执行远程导引第一次变轨.第13圈,在天链1B卫星测控支持下正确执行远程导引第二次变轨.第16圈,在天链1A卫星和远望五号测量船的测控支持下正确执行远程导引第三次变轨.第19圈,在测控区外正确执行远程导引第四次变轨.第24圈,在纳米比亚站正确执行远程导引第五次轨道修正.第24圈至第27圈,根据飞船发动机不工作期间的速度增量累计,对所有加速度计进行了零偏完全补偿.第27圈,微波雷达、轨道舱数据综合线路相继正常加电,对远程导引终端条件和转自主控制条件满足情况进行了评估,评估结果满足转自主控制条件.第28圈,差分卫星导航设备和微波雷达正常建立相对导航,并在圣地亚哥站飞船正常转入自主控制.寻的段第一次变轨机动在测控区外正确执行,寻的后续三次变轨控制正常,稳定转入5km保持.第29圈,飞船接近段控制正常,在纳米比亚测控站监控下进入400m保持点.第30圈,在卡拉奇站监控下进入140m保持点,CCD光学成像敏感器正常建立相对导航.最后平移靠拢段姿态和位置控制精准,对接机构未经强制校正,即完成对接机构锁紧.
对接机构锁紧完成后,飞船转入组合体停靠状态,GNC分系统除GNC控制器外其他设备全部断电.第208圈,飞船开始准备二次对接,GNC分系统设备相继加电,CCD光学成像敏感器、差分卫星导航设备和激光雷达正常建立相对导航.根据辅助CCD像机在轨遥测数据,并根据地面分析和补充试验,GNC分系统对最后平移靠拢段相关参数进行了微调.第215圈,飞船正常分离,并正常进行了第二次交会对接,同样精准满足对接初始条件.第216圈,对接机构锁紧完成后,飞船转入组合体停靠状态.至此首次交会对接任务的两次交会对接均顺利完成.
2.2 第一次交会对接结果分析
2011年11月02日22时17分08秒,差分卫星导航设备和微波雷达均稳定输出,神舟八号飞船建立相对导航,为转入自主交会对接提供了先决条件.2011年11月02日23时08分08秒,飞船转入寻的段,开始自主交会对接过程.
(1)寻的段
通过详细分析寻的段遥测数据,得出以下结论:
1)寻的段差分卫星导航设备、微波雷达相对导航敏感器全程有效;激光雷达在相距12.407km处捕获相对目标,之后全程有效;
2)差分卫星导航设备、微波雷达、激光雷达测量数据精度满足技术指标要求;
3)由于相对导航和姿态确定准确,第一次寻的机动和第四次制动所需的调姿角都较小;第二次、第三次寻的机动控制量较小,不调姿,均由平移发动机完成;
4)调姿、变轨以外的寻的飞行段,对地姿态角和姿态角速度均按设计状态受控;
5)进入5km保持点的精度高,直接进入位置保持控制律死区,5km保持期间,发动机未工作.
(2)接近段
通过详细分析接近段遥测数据,得出以下结论:
1)接近段全程保持对地三轴稳定姿态,在频繁平移变轨和进入400m及140m保持前的视线制导中,三轴姿态和姿态角速度均按设计状态受控;
2)差分卫星导航设备、微波雷达、激光雷达数据全程有效,满足指标要求;
3)接近段位置控制精度满足设计要求;
4)进入140m保持前,远场CCD光学成像敏感器测量数据有效,建立正常滤波状态.
(3)平移靠拢段
通过详细分析平移靠拢段遥测数据,得出以下结论:
1)经数据分析,接触时的相对轴向速度、横向位置总误差、横向合成速度、三轴姿态角、三轴姿态角速度均优于技术指标要求;GNC分系统在收到接触信号后,开正推发动机,直至收到捕获信号;依据接触时的数据和正推发动机开机时间,以及对接机构未经强制校正即完成对接机构锁紧这几方面看,第一次交会对接的接触和捕获精度达到国际先进水平;
2)以近场CCD光学成像敏感器衡量激光雷达和差分卫星导航设备,二者在近距离范围内的数据精度均满足技术指标要求;
3)整个平移靠拢段,远、近场CCD光学成像敏感器、激光雷达、差分卫星导航设备等在捕获目标后均未丢失目标;
4)平移靠拢段相对姿态角、相对姿态角速度,均满足任务要求;
5)交会对接过程400m以内,人控电视摄像机图象清晰,宽视场切换窄视场工作模式正常;最后平移靠拢段,自动调光正常,十字靶标清晰.
2.3 第二次交会对接过程结果分析
第二次交会对接旨在试验阳光反射对CCD光学成像敏感器的影响.撤离、140m保持、30m接近、30m保持全部安排在阳照区.
通过详细分析第二次交会对接遥测数据,得出以下评价:
1)远场CCD光学成像敏感器的测量数据波动,除因几何特征随距离增大而增大外,还随太阳矢量与目标飞行器夹角减小而增大.CCD光学成像敏感器产生的合作目标的光斑来自两方面:合作目标的自身发光;合作目标的太阳反射光.太阳矢量与目标飞行器夹角越小,合作目标的太阳反射光越强,对测量数据精度的影响也越大;
2)在太阳光与目标飞行器前锥面夹角达到最小值的-2m~2m区间内,对接机构除了阳光反射的环形区域外,存在镜面强反射超亮光斑,在距离某一远场合作目标较近的范围内,也发现超亮光斑,影响远场合作目标的识别;
3)近场CCD光学成像敏感器在阳照区,未见阳光反射影响,阴影区测量精度很高;
4)基于CCD光学成像敏感器/陀螺/高精度加速度计的导航滤波效果显著,降低了干扰影响,保证了控制过程平稳;
5)第二次交会对接过程中相对位置、相对姿态控制正常;
6)CCD光学成像敏感器、激光雷达、差分卫星导航设备、微波雷达测量正常,全程各导航敏感器在捕获目标后均未丢失目标;
7)人控电视摄像机图象清晰,宽视场、窄视场模式互相切换正常,自动调光正常,十字靶标清晰;
8)经数据分析,接触时的相对轴向速度、横向位置总误差、横向合成速度、三轴姿态角、三轴姿态角速度均优于技术指标要求;GNC分系统在收到接触信号后,开正推发动机,直至收到捕获信号;依据接触时的数据和正推发动机开机时间,以及对接机构未经强制校正即完成对接机构锁紧以及锁紧完成时间这几方面看,第二次对接的精度高于第一次对接的精度.
3 主要成果
GNC首次交会对接任务的主要成果如下:
1)首次交会对接任务,两次成功对接,验证了交会对接GNC系统的设计、技术实现和地面验证是正确的;
2)神舟八号飞船和天宫一号目标飞行器的交会对接精度位列世界先进水平;
3)在两次交会对接的相对运动范围内,CCD光学成像敏感器、微波雷达、激光雷达、相对卫星导航设备以及人控电视摄像机等交会对接关键单机的功能和性能指标,均满足系统设计要求;
4)验证了神舟八号飞船交会对接测量设备和天宫一号目标飞行器合作目标的安装精度均满足任务要求;
5)验证了撤离模式设计和实现的正确性.
4 结 论
神舟八号飞船GNC分系统完成了中国首次空间交会对接的全部制导、导航与控制任务,两次交会对接飞行试验的结果表明,GNC分系统实现的交会对接控制指标处于国际先进水平.
[1] 张昊,胡海霞.SZ-8载人飞船 GNC分系统正样方案设计报告[R].北京控制工程研究所技术报告,2010
[2] 于丹.SZ-8载人飞船GNC分系统正样技术设计报告[R].北京控制工程研究所技术报告,2010
[3] 吴宏鑫,胡军,解永春.基于特征模型的智能自适应控制[M].北京:中国科学技术出版社,2009
[4] 张维瑾 .SZ-8载人运输飞船GNC分系统GNC控制器正样应用软件研制总结报告[R].北京控制工程研究所技术报告,2011
Shenzhou-8 Spacecraft Guidance Navigation and Control System and Flight Resu lt Evaluation for Rendezvous and Docking
HU Jun1,XIE Yongchun1,2,ZHANG Hao1,YU Dan1,HU Haixia1,2,ZHANGWeijin1
(1.Beijing Institute of Control Engineering, Beijing 100190, China;
2.Science and Technology on Space Intelligent Control Laboratory, Beijing 100190, China)
The Shenzhou-8 spacecraft guidance,navigation and control(GNC)system,and working principles, rendezvous and docking(RVD)phase partition, system implementation concerns are introduced in this paper.Also,the first RVD flight result and its evaluation of Shenzhou-8 and Tiangong-1 spacecrafts are introduced.
Shenzhou-8 spacecraft;rendezvous and docking;guidance,navigation and control;flight result

V448
A
1674-1579(2011)06-0001-05
DO I:10.3969/j.issn.1674-1579.2011.06.001