交会对接敏感器总体设计要点分析
2011-11-25李彬,任馄
李 彬,任 馄
(北京控制工程研究所,北京100190)
交会对接敏感器总体设计要点分析
李 彬,任 馄
(北京控制工程研究所,北京100190)
相对测量技术是完成在轨航天器交会对接的重要技术之一,设计能够完成相对位置、速度,以及近距离的相对角度、角速度测量的交会对接敏感器,用于确定交会的轨迹和控制对接时的相对运动,不仅要考虑实现功能、性能方面,还要考虑在工程实现中外太空杂光干扰、热环境等因素的影响.本文不涉及到交会敏感器的具体设计,而是从分系统的任务和技术总体设计角度,总结交会对接敏感器设计时应注意的几个方面.
相对测量;交会对接敏感器;GNC分系统设计
航天器的敏感器配备与任务密切相关,一般航天器的在轨任务有对地、对惯性空间稳定等模式,需要测量敏感器具备测量航天器本体与星空(星敏感器)、地球(地球敏感器)、太阳(太阳敏感器)、惯性空间(惯性敏感器)等相对关系的能力,具备这种能力的敏感器称为绝对敏感器(相对于交会测量敏感器而言),部分绝对敏感器可对相对测量提供辅助作用.
交会敏感器主要用来完成两个航天器的相对位置、速度测量,在近距离时还需要完成相对角度和角速度的测量,其工作原理涉及光学、电波(微波)测量和GPS等技术领域.
1 交会敏感器的使用概况
根据国内外的工程实施情况,交会敏感器一般有电波雷达(微波雷达)、激光雷达、GPS测量、视频测量、光学瞄准镜等等.电波雷达(微波雷达)具有测量距离远(百公里量级)的优势,因此各国在早期的交会对接任务中,一般均将电波雷达(微波雷达)作为远距离至较远距离(几百千米至几十米)的重要测量敏感器,俄罗斯是较早采用电波雷达(微波雷达)完成交会测量,且技术较成熟的国家之一,美国在早期也将电波雷达(微波雷达)作为远程测量的手段.20世纪80年代,欧空局也开始发展空间交会雷达技术.
随着GPS技术的发展与成熟,欧空局和日本逐渐采用GPS技术用于百米量级以远的相对测量,差分GPS技术的发展成熟使其精度可达到厘米量级,因此也逐渐地应用于距离更近的范围,在近距离范围内,差分GPS技术也可作为近距离测量敏感器的备份手段.在中远距离,使用差分GPS技术作为主份产品,欧空局采用电波雷达(微波雷达),日本采用绝对GPS和地面引导作为备份手段.
由于激光器的限制,激光雷达测量距离受到较大限制(十公里量级),但激光雷达(含激光测距)具有波束窄、测量精度高等突出特点,常作为中近距离测量的手段之一.
在近距离(逼近段,0~百米),因为需要同时提供相对位置、速度、角度、角速度六自由度的测量信息,一般采用光学瞄准镜(航天员判断)、CCD摄像机等视频测量设备,用激光雷达或者其他测量手段作为备份.
为了充分发挥各种敏感器的优点,并提高备份冗余手段,国内外的交会敏感器在使用上一般采用分段式策略.在远距离可选用的敏感器有GPS绝对测量和电波雷达(微波雷达);中距离可选择激光雷达、差分GPS、电波雷达(微波雷达);近距离采用视频敏感器、激光雷达、差分GPS技术等.
2 交会对接任务对敏感器的要求
在交会对接敏感器的设计中,除了考虑功能、性能指标,以及若干可靠性的措施以外,还应当充分考虑任务的特殊性,分析对敏感器的要求.
主要有以下几个方面:
(1)能够适应真空和太空的热(阳照区、阴影区)条件
交会敏感器用来测量两个航天器的相对关系,因此一般安装在舱外能够相互可通视的范围内,舱外设备的热条件一般较舱内恶劣,温度交变频繁(近地轨道1~2小时一次循环),交会敏感器一般都具有较大的直接面向太空航天器的测量敏感口,这些接口直接面对阳照区太阳的加热和阴影区4K的冷空间,对其温度耐受度和温度控制措施要求较高,另外,太空的真空环境要求设备对真空设备不敏感;
(2)能够适应太阳在不同方位照射条件
航天器在轨交会可能在阴影区或者阳照区来完成.太阳光光谱覆盖面宽(从无线电波段到远紫外谱段)、功率强(>1400W/m2),是外太空的主要影响因素之一,主要通过强杂光、目标反射、电磁干扰等途径对基于光学和电磁工作原理的敏感器产生影响,另外,阳光进入光学敏感器的视场后,由于其功率极强,一般将导致敏感器工作失效,严重时会造成敏感器损伤,因此,对基于光学的交会敏感器应考虑采用遮光罩等措施,抑制阳光的影响,同时提出阳光抑制角约束交会轨道的设计,必要时还需要特殊设计以提高敏感器件对阳光直射的耐受能力.
另外,外太空阳光照射还容易造成材料的变性,表面特性发生变化,从而影响基于光学成像测量的视频敏感器的捕获、测量等功能.
(3)能够提供满足精度要求的静动态测量数据
这是测量敏感器的基本要求,在设计时需要考虑和分析工作机理,分析误差环节和造成误差的原因,分离主要误差源,并采取措施抑制,以使敏感器的性能满足要求.
(4)能够提供满足要求的数据更新率(频带)
测量敏感器的数据更新率主要约束敏感器的带宽.测量敏感器的频带与系统的控制周期、使用方法,以及航天器的动力学、运动学特性密切相关,带宽选择过宽会带来较大的测量噪声,太窄则会影响对控制系统动态特性的测量,因此,确定测量敏感器具有合适的频带至关重要.数据更新率指的是含有当前测量信息的数据更新,不仅仅是通讯的频率.
(5)在近距离可能存在遮挡等视场问题
对于激光雷达和视频敏感器,合作目标能够全部在视场内不被遮挡,否则可能会造成测量功能的丧失或者性能下降,对于基于相位法测量的电波雷达(微波雷达),还要求在视场内不存在影响微波传输的物体(一般指金属物),否则会产生多径效应,电波雷达(微波雷达)在此情况下的测量数据基本不可信.
(6)测量切换
由于激光、微波的功率强度等随着距离的变化而迅速变化,一般的敏感器难以适应如此之大的动态范围,一般采取随着距离不同而切换不同功率进行测量的方法.切换的条件一般由功率变化决定,也有的将功率变化转化为距离变化,在不同距离使用不同的功率,在测试中,切换的合理性和有效性也是必须验证的内容之一.
(7)可能的长寿命要求
长寿命的要求首先针对敏感器的合作目标.合作目标安装在对接的目标航天器上,而目标航天器的寿命一般在10年左右,因此,合作目标必须考虑长寿命在轨运行问题.对于安装在追踪器上的雷达,视在轨时间长度、对接次数、对接间隔、有无在轨更换能力等因素确定寿命要求.
3 交会对接敏感器的工作体制
本节简要介绍敏感器的工作体制和工作机理.由于GPS的原理和应用介绍较多,本节略去,光学瞄准镜采用人员观察的方法,也不再多加说明.
3.1 电波雷达(微波雷达)
电波雷达(微波雷达)从工作方式上分,有主动式交会雷达(如美国Motorola公司的X波段脉冲多普勒雷达)、主动与应答合作复合式(如美国航天飞机使用的Ku波段雷达)、应答合作式(如 Apollo飞船的X波段雷达、苏联/俄罗斯使用的KYPC系统)等;从测量方式上看,有比幅单脉冲测角、顺序波瓣法测角和相位法测角等.相位法测角方式可以不用采用随动系统(如欧空局的S波段交会雷达)[1],可以减轻重量和功耗,提高在轨工作可靠性.另外,有的电波雷达(微波雷达)还兼有通讯功能.
3.1.1 距离的测量
电波雷达(微波雷达)距离的测量一般都通过对有控制的回波信号与确定的时间基准进行比较,计算无线电波的传输时间延迟Δt,与其传输速度的乘积求得相对距离.
式中,c为无线电在真空中(航天器在轨运行)的传输速度;Δt为无线电波传输一个来回的时间延迟.
如果采用合作方式,则要考虑Δt中包括了前向传输时间 Δt1、合作目标的响应时间 Δt2、合作目标发出的无线电波后向传输时间Δt3,因此,实际的相对距离为:根据雷达距离方程,设雷达发射功率为 Pt(W),若雷达以方向性为功率增益Gt的天线辐射能量,则在距离R处的天线波束内的功率密度为
可以看出,对于给定发射功率和功率增益的天线,天线波束内的功率密度与距离的平方成反比,如果是非合作测量,假定在距离R处存在一个等效面积为σ的反射目标,在雷达处被等效面积为的天线接收,则天线接收到的电磁波能量为:

可以看出,对于非合作的测量雷达,接收到的雷达能量与距离的4次方成反比.
对于合作测量,一般采用合作应答机跟踪并锁定雷达的频率(或者还有编码),再进行转发的方式,这样,在雷达接收处接收到的能量变为:
式中,Pb、Gb分别是应答机天线的发射功率和功率增益.
因此,在采用电波雷达(微波雷达)进行距离测量时,在同样的雷达发射功率、天线增益的情况下,合作方式比非合作方式有更远的测量距离.
3.1.2 速度的测量
距离的微分就是速度,因此通过对距离的微分可以提供速度信息,但是,由于存在着测量噪声,因此在较高动态的情况下,通过距离微分得到的速度精度很低,经过微分环节放大后测量噪声更大,没有实用价值,对于电波雷达(微波雷达),一般通过多普勒测速,可以提供更高精度、也更稳定的相对速度.
为了兼顾距离和速度的测量,电波雷达(微波雷达)一般采用调频法(三角波调制、正弦波调制)、脉冲法(相干脉冲、非相干、侧音调制)、脉冲压缩法(线性调频、相位编码)等方法.
无论采用何种调制方法,在电波雷达(微波雷达)的解算中,首先需要跟踪和锁定跟踪的频率(或者相位,必要时还有码位,根据调制方法不同而不同),并将锁定的相关参数与发送的频率、相位、码位进行比较和计算,提取时间延迟和频率偏移,得到距离和速度,当然,还必须要考虑到锁相、滤波、数据融合等具体技术,本文不再赘述.
3.1.3 角度的测量
角度测量的方法有相位法、振幅法、比幅单脉冲法等.
相位法测角也称作干涉仪测角,它是利用两个或者多个天线所接收到的回波相位差进行测角.

图1 角度测量示意图
如图1所示,假设两个天线 A1、A2的间距为 d,在方向远处有一目标,由于程差而存在相位差,则有:ΔR=c,
根据相位差就可以计算出角度.
在实际工程中,如何选择天线d的基线长度和天线的个数需要认真考虑测量范围和测量精度而确定,一般采用多个天线,组成多个基线,既能保证视场,也能满足测量精度.
振幅法测角通常使用伺服机构,带动接收天线寻找到回波的幅值最大处(即信号中心),从而确定目标的角度,并控制伺服系统跟踪,根据伺服系统的转动角度得到测量角度.
比幅单脉冲法测角通常通过接收天线网络(至少4个天线组成)的和、差网络,得到和信号与差信号,根据二者的关系,确定目标角度,并控制伺服系统跟踪,根据伺服系统的转动角度得到测量角度..
基于相位法测角一般不需要天线的转动,即不需要伺服系统即可完成测量.
3.2 激光雷达
激光雷达由于工作波长较短,单色性好,相干性好,在理论上比电波雷达(微波雷达)有更高的分辨率(测量精度),另外,由于激光的波束窄,因此具有较强的抗干扰能力.
3.2.1 激光器
激光器有固体激光器、气体激光器(如氦氖激光器)、半导体激光器(特点是体积小、重量轻、抗震性强等,如半导体泵浦激光器)等种类.
激光雷达对激光器生成的激光光束的要求是波束窄(能量集中且指向性好)、波面光强均匀(回波稳定)、功率满足测距要求、切换响应迅速等,对于采用调制测量的激光雷达,还需要激光具备单色性好、频率稳定度高等特点.
激光雷达在太空中工作时,不可避免地要受到太空中阳光及目标器反射光的影响,因此在光谱的选择上,应选择阳光能力相对较弱的谱段,同时采用带通滤光片,抑制通带外的阳光和发射光能量.另外,在控制波束宽度的前提下,缩小接收窗口,减小阳光及反射光的影响区域,防止阳光或者强发射光进入激光雷达视场.
由于激光的波长极短,基于电波雷达(微波雷达)原理的相位法测量实现较困难,因此一般通过对激光采用振幅、强度、相位或频率调制等方法来调整测量范围,降低实现难度.调制器可以集成在激光器内,也可以采用在激光器以外的外调制方法进行.
3.2.2 探测器
光探测器有光子探测器和热点探测器两大类,激光雷达主要采用光子探测器类,此类可分为光电子发射型、光电子附特型、光电导型、光电磁型等.探测器的响应频率一般远远低于光频率,因此,不采用光调制方法,而直接探测光信号的相干性来进行速度和角度检测的难度很大,基本难以实现.在现有的技术基础上,对光信号的探测有直接探测式、外差探测式等,在这两类方法中,由于难以直接探测激光信号频率或相位,一般均采用探测激光平均功率的方法.
3.2.3 距离的测量
激光雷达对距离的测量一般有脉冲直接测量、(调制信号)相位测量、相干测量等.脉冲直接测量与电波雷达(微波雷达)的机理相同,通过测量光脉冲信号的路径传输延迟时间确定相对距离,这是一种精度相对较低,但实现较简单、技术成熟的方法.相位测量需要对激光信号进行调制,检测调制后的相位延迟,相干测量则需要激光的光源单色性好、频率稳定,同时在本地应产生本振激光信号,同样需要较高的频率纯度和稳定度.
3.2.4 速度的测量
速度信息可以通过直接距离微分法得到,这种方法得到的速度精度较差,通过数据的平滑可以提高精度,但会降低响应频带.另外还可以通过激光外差多普勒测速、音频测速等.音频测速通过对激光信号进行幅度调制,可降低对于激光的光谱纯度和稳定度的要求.
3.2.5 角度测量
激光雷达的角度测量有四象限跟踪测角和成像测角两大类.由于激光波束的限制,一般激光雷达均需要伺服系统提供扫描功能.如图2所示,四象限探测器由4个相同的探测器A、B、C、D组成,通过对4个探测器输出进行和差运算,可以得到光斑能量中心与探测器的位置偏差.
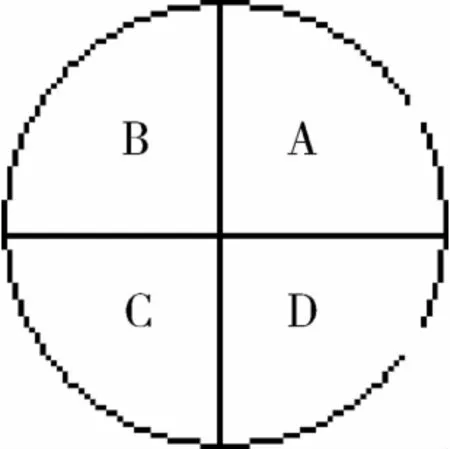
图2 四象限探测器
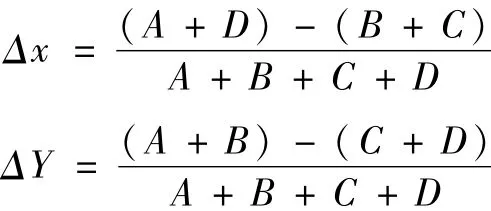
运动控制系统控制伺服机构根据 Δx、Δy、的计算结果,将Δx、Δy、控制到0,读取伺服系统的读数,可以得到指向角度.
成像测角时,激光雷达按照一定的规则控制激光在空间扫描,得到空间目标的立体像,根据立体像中特征点的相对关系解算三维位置和角度.这种方法需要完成扫描后才能完成一次测量,故数据更新率(频带)较低,同时对存储量、计算量的要求比较高,这种机理的激光雷达除了能够满足交会对接的要求以外,还可以用于立体成像、探测等应用领域,目前德国耶拿公司的RVS具备此种能力.
3.3 视频敏感器
视频敏感器(VGS)用于交会对接的最后阶段(平移靠拢段),一般采用CCD或者 APS等光学成像芯片,在特定的谱段,通过精确设计的光学系统,对目标飞行器上事先设计安装的合作目标成像,由高性能的计算机对图像进行处理,得到3个位移、3个姿态角及其变化率,完成六自由度的静动态参数测量.
视频敏感器需要处理图像,因此其计算能力和存储能力较强,电子设计复杂,一般需要采用DSP、FPGA等超大规模集成电路完成,因此,在抗空间环境(电磁辐射、高能带电粒子等)方面需要着重注意.
视频敏感器由合作目标、相机两大部分组成,分别安装于目标飞行器和追踪飞行器,合作目标又分为主动发光式和被动反光式两类.相机由光学系统(含滤光片)、CCD/APS感光部分、处理电路部分等组成(对于被动反光式合作目标,相机部分还需要配置主动光源).
测量时,相机通过对目标飞行器和合作目标的成像,提取特征光点,解算六自由度的参数.
4 交会对接敏感器设计要点
4.1 设计要点
(1)工作谱段的选择
由于太空阳光的能量极强、谱段也很宽,为了减小和抑制阳光(及反光)对 CCD的影响,应选择相对较弱的太阳光谱段作为工作谱段,并且采用窄带滤光片,另外,从分系统的角度考虑,还应该在激光雷达的工作谱段和视频敏感器的工作谱段之间就出足够的隔离带宽,防止两种敏感器的相互串扰和影响.
在确定工作谱段时,还需要考虑 CCD/APS等敏感器件的响应特性,应选择在拟选择的谱段有较好的响应特性的敏感芯片.
(2)阳光抑制能力
由于阳光能量太强,阳光进入视频敏感器时,视频敏感器将失效,严重时阳光还会对 CCD/APS等敏感芯片造成损伤,这是交会敏感器对发射和对接窗口的约束之一,在设计任务时必须考虑.视频敏感器一般都设计遮光罩(或者遮光筒),加强视场外的对阳光抑制能力.
(3)抗杂光影响
视频敏感器进入视场的空间背景成像,地球、星星、目标飞行器等都会成像,另外,目标飞行器上的表面、突出物、交会对接机构表面可能会反射阳光,这些都会造成提取光点的困难.因此,在分系统设计时,一方面需要采取措施,优化识别算法,另外一方面,要采取各种措施抑制杂光的形成,尽量给视频敏感器形成一个较好的成像条件[2].
4.2 敏感器的基准
对于交会敏感器,由于要测量的量包括位置和速度,而不是像以前的姿态敏感器主要完成指向测量,所以,除了方向基准外,还需要设置位置基准.位置基准一般采用刻线方式.为了便于计量,刻线一般实施在立方镜上.
敏感器的基准一般有机械基准、指向基准、位置基准、结构基准、安装基准等,结构基准用于安装敏感器件,比如陀螺安装支架、视频敏感器的光学镜头等,安装孔(基准)一般与结构基准在一起,机械基准一般为加工时特意控制的平面,一般有两个正交面,用于工艺安装、标定时作为靠面使用,指向基准和位置基准主要是为了最后在飞行器上安装时使用光学设备瞄准使用的.
这些基准之间有密切的关系.一般而言,这些基准的关系是固定的,在制造和标定时确定下来,后续的测试、标定均在某个基准上进行.一般不允许这几个基准之间存在不确定性.由于安装敏感器时主要依靠光学基准,但安装孔又建立在机械基准上,所以光学基准与机械基准(安装孔)之间的偏差应控制在一定的误差范围内.对于交会敏感器,在安装时需要同时满足指向和位置要求,安装调整难度更大,因此单机敏感器的这个误差带应更小.
4.3 敏感器的标定
在对敏感器进行标定之前,应首先建立敏感器的误差模型,通过标定过程确定敏感器模型中的各个参数,以提高最终测量精度.
标定一般分为内标定和外标定.内标定是指在生产、制造过程中通过光学、机械、三坐标等方法,对各敏感器中的光学、电子、机械等元件或者其相对关系进行直接或者间接计量,建立相对关系,并将这些相对关系代入到测量计算公式中.外标定一般指在单机外部通过光学、机械等方法,建立高精度(优于敏感器的测量精度3~10倍)的相对位置和姿态,采集敏感器的输出数据,通过数学处理的方法,得到误差模型中的各参数.外标定不同于测试,标定完成后,必须另外设计测试用例,经过误差模型解算,得到敏感器的测量精度,并进行评估.
5 敏感器的测试与验证
在地面对敏感器进行充分的测试与验证非常重要,为了在轨能够提供满足精度的测量数据,地面的测试要充分考虑到在轨的实际应用情况,并设计相应的测试用例验证敏感器的各项性能.另外,在分系统联试、整星测试中,也要通过不同的方法,验证敏感器的工作性能.单机测试一般分为静态和动态测试.静态测量精度指敏感器和合作目标不存在相对的平动和转动时,对敏感器进行的精度测量,主要考核敏感器的静态精度,通过敏感器的静态精度测量,可以分析敏感器的均值、方差等数据,分离出敏感器的系统误差、随机噪声,这是分析和提高敏感器精度的前提和基础,进而通过对测量结果的分析,还可以分离出测量设备误差、敏感器标定误差,以及测量噪声的特性等等,可以得出非常重要的敏感器的静态误差模型;动态测量主要指给敏感器和合作目标施加确定的各种运动,如正弦、直线、加/变速、指定轨迹等,考核敏感器的响应频带、传输时间延迟等是否满足要求.系统测试和整船测试受限于测试条件,主要检查敏感器在分系统和整船条件下时序是否协调、接口是否匹配,另外,分系统联试时,还需要检查在模拟的飞行过程中敏感器与分系统的协调性,包括精度、时序、接口等内容,必要时还需要进行考机试验,以检查全系统在长时间工作时是否正常.
试验和研制过程表明,由于存在天地不一致的问题,以及充分验证的困难,工程难度较大,因此,不断提高敏感器的抗干扰能力对于完成任务至关重要.
6 结 论
本文从分系统层面,提出了对交会敏感器设计的部分要求,另外,通过介绍交会敏感器的工作体制,提出了在单机、分系统和整星应该验证的相关内容.试验和研制过程表明,由于存在天地不一致的问题,以及充分验证的困难,工程难度较大,因此,不断提高敏感器的抗干扰能力对于完成任务至关重要.
[1] 张淑琴.空间交会对接测量技术及工程应用[M].北京:中国宇航出版社,2005
[2] Wigbert F.航天器自主交会对接技术[M].李东旭,译.长沙:国防科技大学出版社,2009
System Analysis for Rendezvous and Docking Sensor Design
LIBin,REN Kun
(Beijing Institute of Control Engineering, Beijing 100190, China)
Relative measurement is one of the most important techniques in rendezvous and docking for spacecrafts.To design the relativemeasurement instruments formeasuring the relative position, velocity,angle and angular rate between target and chaser spacecrafts.In rendezvous and docking engineering implementation,some problems such as light and temperature disturbance should be considered carefully.The article isn’t care for the detail technique used in the instrument design, but give some advice and requirements for these instrument design on the basis of GNC subsystem analysis and design.
relative measurement;rendezvous and docking sensor;GNC subsystem design

V448.2,TN379
A
1674-1579(2011)06-0034-06
DO I:10.3969/j.issn.1674-1579.2011.06.006
2011-08-20
李 彬(1968—),女,黑龙江人,高级工程师,研究方向为航天器控制系统总体设计与测试技术(e-mail:libin@bice.org.cn).