混合励磁双凸极电动机调速系统性能仿真研究
2011-11-20易龙芳茅靖峰顾菊平
易龙芳,茅靖峰,顾菊平
(南通大学,江苏南通226019)
0 引 言
永磁电机由于有较好的运行效率、功率密度和转矩惯性比等优势,广泛应用在对重量、体积以及效率要求较高的场合;但由于永磁材料的固有特性,使电机内气隙磁场不易调节,导致永磁电机在电动汽车等需要宽调速驱动的领域应用受到一定的限制。近年来,混合励磁电机得到了国内外电机界的广泛关注[1-4]。所谓“混合励磁电机”,就是合理改变永磁电机结构,引入辅助电励磁绕组形成的一种新型电机拓扑,即电机中存在两个磁势源,因此它继承了永磁电机的优点,又具有励磁可调的特点[1]。用作发电机,可获得较宽的调压范围,并在故障时可以实现快速灭磁;用作电动机,可以获得宽广的调速范围,适合作节能驱动使用。
本文研究的混合励磁双凸极电动机(HEDS电动机)是在双凸极永磁电动机(DSPM电动机)的基础上引入电励磁形成的一种新型电机结构,它具有DSPM电动机结构简单、工作可靠、高功率密度、高效率等优点[5-7]。本文在提出HEDS电动机数学模型的基础上,采用基于Matlab环境的Simulink/PSB工具箱,对HEDS调速系统进行了建模与仿真,以验证数学模型、调速控制策略、仿真方法是否有效。
1 HEDS的数学模型
电机的数学模型是根据机电能量转换、电磁感应定律以及电路理论而推导出来的,是建模仿真的依据,也是电机及其控制一体化仿真的前提。HEDS调速系统的数学模型主要包括定子电压方程、磁链方程、功率方程、转矩方程、运动方程及其相关的约束条件。当电励磁电流为零时,HEDS的基本运行理论与数学模型与DSPM相同。
1.1 电压方程
同DSPM电动机相比,HEDS电动机增加了电流励磁绕组,存在电励磁磁链,各绕组的电压方程:

1.2 磁链方程
由于电机凸极结构特性及磁路饱和原因,电机绕组的磁链和电感均受转子位置角及电枢电流、励磁电流的影响,并非常数。考虑到电枢绕组的自感、互感以及电枢绕组与励磁绕组之间的互感,磁链方程可写为:

式中:ψpma-c为绕组的永磁磁链;La-cf为电枢绕组与励磁绕组的互感。
由电磁感应定律,并考虑式(1)、式(2)可以得出电机稳态时的电枢绕组相电压方程:

可以看出,改变if的大小和方向可以调节端电压。将式(1)方程两边同乘以IT,并考虑式(2),得到电机的功率方程:


式中:Tpma为永磁转矩,与电枢电流及永磁磁链随转子位置角的变化率有关,是电机的主要转矩;Tfa为电励磁转矩;Tra为磁阻转矩。磁阻转矩在一个周期内平均值为零,电机主要转矩由Tpma和Tfa提供。
电机的机械运动方程:
式中:T为电磁转矩;Tl为负载转矩;J为系统转动惯量;B为粘滞摩擦系数。
2 控制策略
HEDS电动机由于增加了励磁电流这一变量,使得控制方式更加灵活:低速时(额定转速以下)能通过非电流过载的方式产生比额定值更大的转矩;高速时,通过弱磁控制实现电机转速远超额定值,恒功率运行范围更加宽广,获得一般永磁电机难以实现的工作状态。
为了与普通电机相对应,这里定义额定转速为电枢电压为额定值、电枢电流为额定值、励磁电流为零时的转速;额定转矩为电枢电流为额定电流、励磁电流为零时的输出转矩。额定转速以下时,其输出转矩可以通过电励磁的增磁控制,在电枢电流非过载的条件下,输出大于额定负载的转矩。因此,根据负载转矩的大小,额定转速以下的调速控制分为两种不同的控制方式:当负载转矩小于额定转矩,即Tl≤TN,此时调节电枢电流就可以满足负载转矩的要求,无需励磁控制,电机由永磁体单独提供磁场,即为图1的低速永磁区;若Tl>TN,在保持电枢电流为额定电流前提下,通过励磁增磁控制来获得较大的输出转矩,电机运行在图1的增磁区。转速在额定值以上时,采用恒功率调速,根据转速的高低也分为两种不同的控制方式:当转速n满足nN<n≤nfn(nN为额定转速,nfn为HEDS电动机仅由在永磁作用时,恒功率运行时能达到的最高转速)时,通过增大电枢电压实现,此时电机仍运行在永磁方式下,即为图1中的高速永磁区;n>nfn时,在保持电枢端电压全压的前提下,通过弱磁来实现升速,此时电机运行在图1的弱磁区。这样采取分段恒功率调速的控制策略,可以拓宽HEDS电动机的调速范围。

图1 HEDS系统的转矩-转速特性曲线
HEDS控制系统的难点在于根据不同的转矩和转速变化自动实现上述四个运行工作区的自动切换,实际上就是要求电枢电流控制器和励磁电流控制器之间能够协调配合,实现调压、调磁、调速之间的最佳控制。为此,系统也要采取分区控制,通过反馈转速和电枢给定电流分配模块相互关联在一起,系统靠这种关联能从调压自动转入调磁,根据这种思路,建立如图2所示的系统控制原理框图。
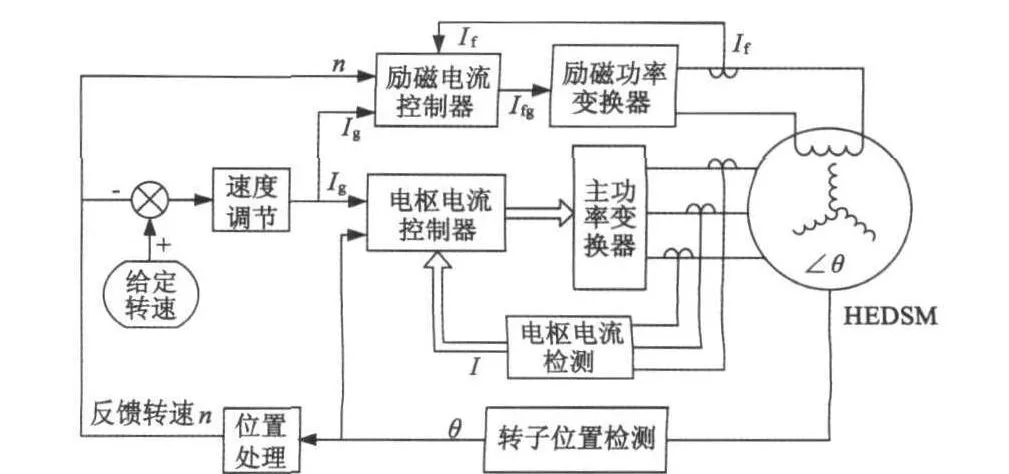
图2 HEDS调速系统控制原理框图
3 HEDS电动机及其系统一体化模型
图3为HEDS电动机控制系统的仿真整体模型,根据各功能划分,包括电机本体、主控制器、起动控制器、励磁电流控制器和功率变换电路等部分。电机本体采用Simulink和SPS模块构建;主控制器由Simulink模块构建,主功率变换器和励磁功率变换器采用SPS构建;励磁电流控制器采用Simulink和SPS模块构建;起动控制器采用Simulink模块构建。

图3 HEDS调速系统整体模型
HEDS调速系统建模的关键及难点在于电机本体的建模。由于HEDS电动机内具有永磁体和电励磁两种磁源,具有电枢绕组和电励磁绕组两套绕组,因此仿真模型较为复杂,参数较多。根据电机数学模型的基本方程,采用Simulink模型库中模块由外向内搭建:由电压方程和转矩方程建立绕组子系统;由励磁电压方程建立励磁绕组子系统;由各绕组所需位置信号建立位置信号处理子系统,由机械运动方程建立运动子系统,如图4所示。其中,在建立绕组子系统中所涉及到的永磁磁链、自感、互感等电机静态参数由电机有限元分析得到,模型中均采用Look-up Table模块给出。

图4 HEDS电动机模型子系统
4 仿真结果及分析
为了分析所建立HEDS模型及控制策略的有效性,本文给出了恒定转矩给定转速突变时系统的输出特性,以及恒定转速负载转矩突变系统的输出特性,并将后一种运行情况与DSPM电动机进行了对比,以说明HEDS具有更强的适应负载的能力。仿真对象为12/8极的HEDS电动机,其主要参数:额定功率P=630 W,额定转矩TN=4 N·m,额定转速nN=1 500 r/min,额定励磁电流IfN=1.4 A,额定电流IN=6.3 A。
4.1 恒定转矩给定转速突变时
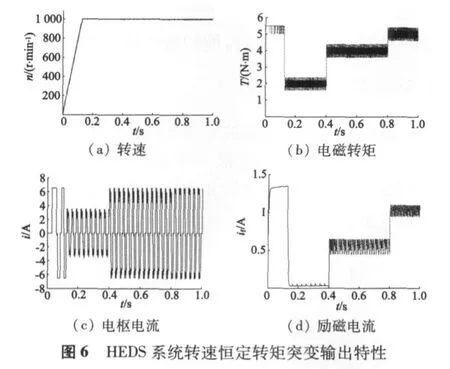
仿真条件:给定转矩为2 N·m,给定转速为1 000 r/min,电机从静止起动到稳定运行;0.4s时给定转速突变为3 200 r/min,1.2 s时给定转速突变为1 600 r/min。
从图5可以看出,电机起动阶段,为了缩短起动时间,提高响应速度,电机的电枢电流和励磁电流均达到最大值,此时电机的最大转矩为5.5 N·m,电机运行在图1的增磁区;转速达到给定值1 000 r/min后,电机转入稳态运行,此时励磁电流为零,电磁转矩为给定的负载转矩,电机运行在图1的低速永磁区,相当于DSPM电动机,具有经济的运行性能。t=0.4 s时给定转速为3 200 r/min,电机为了尽快加速,电枢电流和励磁电流均最大,根据控制策略,电机转速上升到1 200 r/min后励磁电流逐渐减少,当转速到达额定转速1 500 r/min时,励磁电流减小到零,如图5d所示,此时虽n>nN,由于电枢电流保持额定值,电磁转矩较大,电机仍加速运行,运行在图1的高速永磁区;当电机转速上升到永磁恒功率的临界转速nfn时(本系统为2 400 r/min),励磁电流负向增加,电机运行在图1中的弱磁区。当t=1.2 s时给定转速为1 600 r/min,电机的电枢电流和励磁电流迅速变为零,此时电磁转矩为零,电机转矩加剧下降,直至给定转速1 600 r/min,电枢电流稳定输出。可见,恒定负载转矩下,当给定负载突变时,HEDS电动机驱动系统具有较快的响应能力。

图5 恒定转矩给定转速突变时的输出特性
4.2 恒定转速负载转矩突变时
为了说明HEDS驱动系统具有较强的负载适应能力,本文将与DSPM系统对比分析。仿真条件:给定转速为1 000 r/min,电机带动2 N·m的负载转矩从静止起动到稳定运行;0.4 s时负载转矩突变为4 N·m,0.8 s时负载转矩突变为5 N·m。
图6、图7分别为HEDS和DSPM驱动系统的仿真结果。从图6a和图7a可以看出,由于HEDS系统起动时可以增磁运行,其起动时间要比DSPM系统短30%。当t=0.8 s,负载转矩突变为5 N·m时,HEDS电动机依靠励磁线圈的增磁作用,可以稳定在1 000 r/min运行;而DSPM驱动系统,尽管电枢电流达到输出上限(电流不再为斩波波形,略大于额定值,如图7c所示),但其最大转矩小于5 N·m,如图7b所示,导致转速下降,不能稳定运行。

5 结 语
本文推导了HEDS电动机的数学模型,研究了该型电机及其调速系统的控制方法。采用功能化与模块化的方法建立了HEDS电动机的Simulink/PSB仿真模型,分析了恒定转矩条件下给定转速突变时系统的输出特性,以及给定转速恒定条件下负载转矩突变系统的输出特性。研究表明,混合励磁电机具有磁场可调的优点:低速时增磁控制具有更大的输出转矩;高速时弱磁控制具有更宽广的恒功率调速范围;并且具有更强的适应负载的能力。仿真结果与理论分析一致,表明了所用仿真方法及控制策略的正确性和有效性。本文为HEDS电动机控制方法的仿真提供了一种行之有效的方法,更为后续硬件控制系统的设计提供了重要的参考依据。
[1] 朱孝勇,程明.定子永磁型混合励磁双凸极电机设计、分析与控制[J].中国科学,2010,40(9):1061-1073.
[2] 陈志辉,周楠.混合励磁双凸极电机三维有限元仿真与数字电压调节技术[J].中国电机工程学报,2010,30(27):26-31.
[3] 李优新.混合励磁无刷直流电机的结构及控制策略研究[J].微特电机,2003,31(3),3-6.
[4] Yi L,Hu Q,Yu L.Static Characteristics of A Novel Two-Way Hybrid Excitation Brushless Motor[C]//International Conference on Electrical Machines and Systems.2005:710-713.
[5] Cheng M,Chau K T,Chan C C,et al.Control and operation of a new 8/6-pole doubly salient permanent magnet motor drive[J].IEEE Transactions on Industry Applications,2003,39(5):1363-1371.
[6] 林明耀,程明,周鹗.新型12/8极双凸极变速永磁电机的设计与分析[J].东南大学学报(自然科学版),2002,32(6):944-948.
[7] 李文广,朱孝勇,程明.双凸极永磁电机逆变电路中分裂电容电压偏差分析[J].微特电机,2006,34(10):17-22.
