磁编码器算法分析与研究
2011-11-20赵继敏
于 非,赵继敏,罗 响
(上海交通大学,上海200240)
0 引 言
位置传感器是伺服控制系统中的关键部分,对检测精度以及系统的可靠性等影响非常大,编码器技术水平直接影响到自动化水平[1]。目前常用的传感器有光电编码器、旋转变压器和感应同步器等。旋转变压器和感应同步器体积较大,光电编码器技术成熟,但成本较高,抗震性能差,无法在恶劣的工作环境下使用[2-3]。磁编码器是将旋转角位置、角位移及角速度等物理量转换为电信号的传感器。磁编码器与光电编码器相比具有以下优点[4]:无接触式的结构使其能够可靠工作在油、灰尘、气温变换强烈的恶劣条件下;不采用发光二极管,使用寿命长,耗电少;结构简单、抗冲击、可靠性高、价格低廉。磁编码器有单磁极式和多磁极式两种[5]。多磁极式磁编码器制造工艺相对复杂,分辨率的提高是通过增加磁极对数来实现的,但制造工艺、产品体积及漏磁场分布等因素限制了分辨率的提高。本文的讨论基于单磁极式磁编码器。
1 磁编码器基本原理
磁编码器是基于磁场强度随转子位置而改变、从而通过检测磁场来获得转子位置信息的工作原理设计的。单对磁极式编码器信号采集的准确性主要受到磁体结构的限制。为此,使用圆片状单对磁体,磁体的N、S极处在同一平面上,磁体水平旋转时会产生马鞍型分布的空间磁场[6]。图1为线性霍尔示意图。

图1 线性霍尔示意图
2 磁编码器设计
磁编码器的设计是基于线性霍尔元件旋转一周产生一个正弦波这一特性。由于仅采用一组线性霍尔元件无法得出具体位置,因此,在设计磁编码器时,通常采用两组线性霍尔元件或更多。以下设计以1对极电机为例。
2.1 采用两组线性霍尔元件求反正切
将两组线性霍尔元件分别间隔90°安装,如图2所示。

图2 间隔90°线性霍尔元件安装示意图
在如此安装的情况下,通过差分可以得到的两组信号:

式中:Umax为线性霍尔元件输出的最大值,UA、UB为两组差分输出信号,θ为电角度。将两者相除并求反正切,可以得到:

计算反正切采用查表的方式进行,事先根据AD的精度编写好对应的反正切表储存在ROM中,计算反正切时,直接读取数组中的对应元素即可。此种算法不但原理简单,而且由于将AD采样所得信号相除,所以能消除由于电源电压幅值变化引起的解码误差。但在实际使用中存在几个问题:首先,计算UA/UB将耗费DSP或单片机的大量处理时间,影响整个控制过程;其次,在每个接近90°的位置,测得角度精确值将大大降低。
2.2 改进算法
为了解决上文中提到的求反正切信号解码算法的问题,采用鉴幅方式重新设计磁编码器算法。鉴幅方式是从AD测得的幅值变化来确定角度数据,这种方法会受到电源幅值波动带来的误差影响,因此,在此提出消除此误差影响的方法。
如图3所示,将AD的Ref信号直接从线性霍尔的电源部分取得(以5 V为例)。在这样设计电路的情况下,电源幅值变化将同时给AD和线性霍尔元件两者带来影响。这就确保了每次AD在采样时,采样的量程范围始终跟踪电源幅值变化而一起变化。
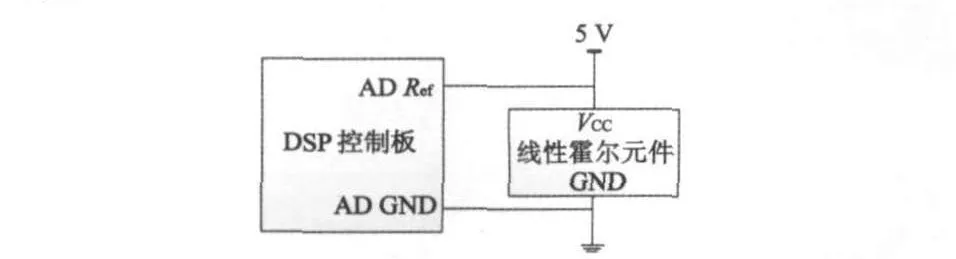
图3 DSP控制板与线性霍尔元件连接示意图
2.2.1 采用两组线性霍尔元件改进算法
在求反正切编码方式基础上,引入第3个信号UC,值取UA的负数,即UC=-UA。输出信号在一个周期内的波形如图4所示,实线为UA,点划线为UB,虚线为UC。根据曲线交点,可以把0°~360°分为8段,每一段使用对应的曲线查表得到对应的角度值。而实际上,每一段查表对应的AD输出值的范围是限定在0°~45°的,因此,只需要编制0°~45°的对应正弦表并存入ROM中,计算角度值时,只要根据AD测量数值查表即可。
实际实现过程如下:首先测量两组线性霍尔元件的差分输出值得到UA、UB,并计算得到UC。然后,根据表1判断出当前电机位置在哪个区间并得到角度起始值θSTART。奇数区间内的,用θSTART加上查表所得角度值,就得到当前角度值;偶数区间内的,用θSTART加上90°再减去查表所得角度值,就得到当前角度值。

图4 间隔90°改进算法波形图

表1 间隔90°改进算法区间判断条件
由于数据表内存储的是AD输出值,且AD的Ref端已经从线性霍尔的电源端得到,保证了AD的采样范围与电源电压变化同步,因此,与电源电压波动无关,不会产生误差。此算法解决了求反正切信号算法存在的问题,但是,也存在着不足:如果UA出现误差,将极大影响整个编码器精度。同时,从图4可以看到,每个接近两条曲线交叉点的位置(45°),曲线的斜率绝对值明显减小,这将导致正弦表查出的角度值变化间隔变大。
2.2.2 采用两组线性霍尔元件
主要思路与前面的两组线性霍尔元件的改进算法相似,但解决了之前算法中由于一组线性霍尔元件误差带来的整体误差问题以及所查正弦表均匀度问题。线性霍尔元件的安装位置如图5所示。在如此安装的情况下,通过差分可以得到的三组信号:


图5 间隔60°线性霍尔元件安装示意图

图6 采用三组线性霍尔元件波形图
式中:Umax为线性霍尔元件输出的最大值;UA、UB、UC为三组差分输出信号;θ为电角度。输出信号在一个周期内的波形如图6所示,实线为UA,点划线为UB,虚线为UC。在使用三组线性霍尔元件的情况下,把0~360°分为12段,如表2所示。奇数区间内,用θSTART加上查表所得角度值,就得到当前角度值;偶数区间内,用θSTART加上60°再减去查表所得角度值,就得到当前角度值。

表2 间隔60°区间判断条件
根据所查表的角度范围不同,计算表内相邻两点间隔的标准差,可以得到数据点的均匀程度对比。标准差计算公式:
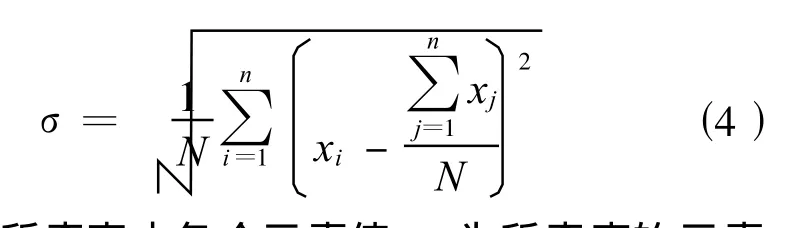
式中:xi为所查表内各个元素值,N为所查表的元素个数。标准差越接近零,表示表内相邻两点间隔值的均匀程度越高。依此计算标准差,并且对比使用不同精度的AD的情况,可以得到如表3所示。

表3 使用不同精度AD、不同算法数据点均匀程度对比
在使用三组线性霍尔元件后,数据点均匀程度明显升高。同时可以看到,AD精度对于数据点均匀程度也有很大影响,AD精度增加,均匀程度也随之增加。
2.3 提高精度的方法
首先,由于霍尔信号发生部分不可避免地存在机械安装误差,线性霍尔元件也存在零点漂移,实际测得的信号可以表示:

式中:ε为振幅变化系数;Δα为零点漂移;Umax为线性霍尔元件输出的最大值。
如果在编码器设计方案中采用差分结构,即在一个线性霍尔元件的对面再安装一个,此相差180°的两个元件构成一组。那么,可以得到的第2个信号:
两者相减,可得:

由式(7)可知,采用差分结构可以有效地消除机械安装偏差和零点漂移所带来的误差,并且使输出幅值增加了一倍。因此,线性霍尔元件的安装均使用差分结构。
其次,除了硬件上的改进之外,还可以通过软件的方法来提高精度。比如采用多次采样取AD平均值滤波、每次DSP初始化重新校正所查角度表等等。
3 Matlab 仿真
在使用3组线性霍尔元件的算法基础上,进行Matlab仿真,仿真系统采用2对极永磁同步电动机,应用SVPWM算法的Id=0控制方法。仿真系统图如图7所示。采用10 bit AD采样,所查表范围是0°~30°,表内AD采样值范围为0~512,达到超过0.1°的分辨率。磁编码器得到的角度与直接编码器得到的角度对比如图8所示(均为电角度)。编码器是累加方式,在超过360°之后继续增加,因此,减去n×360°(n为电机转过的圈数)之后与使用三组线性霍尔元件测得的角度相同。定子电流、转速、转矩曲线如图9所示。

图7 仿真系统图

图8 编码器输出与磁编码器输出对比

图9 定子电流、转速、转矩曲线
4 结 语
本文通过三种磁编码器的实现算法对比分析,给出了一种精度较高的方案,在使用10 bit AD的基础上,可达到超过0.1°的分辨率。并在Matlab环境下进行了仿真,仿真结果验证了方案的可行性,系统运行稳定,波形良好。
[1] 张文栋.存储测试系统的设计理论及其在导弹动态数据测试中的实现[D].北京:北京理工大学,1995.
[2] Miyashita K,Takahashi T,Yamanaka M.Features of a Magnetic Rotary Encoder[J].IEEE Transactions on Magnetics,1987,23(5):2182-2184.
[3] 吕德刚.集成霍尔磁编码器的研究[D].黑龙江:哈尔滨工业大学,2009.
[4] 王爽,李铁才,王治国.基于CORDIC算法的高分辨率磁编码器设计[J].微电机,2009,42(8):1-5.
[5] 郝双晖,刘勇,周春蛟,等.基于标定原理的单磁极编码器设计[J].南京理工大学学报,2005,10(29):226-228.
[6] 曾一凡,高珊,张炳义.基于信号运算和插值原理的磁轴角编码器[J].仪表技术与传感器,2008,12:9-10,51.
[7] 江晓光.线性霍尔传感器在永磁同步电动机矢量控制器中的应用[J].微特电机,2010,38(4):73-74.
[8] 郝双晖,刘勇,郝明晖.过采样提高单对磁极编码器分辨率[J].微特电机,2007,35(12):1-3.
[9] 郝双晖,刘勇,刘杰.基于查表原理的单对磁极编码器研制[J].中国电机工程学报,2006,24(19):165-168.
[10] Kikuchi Y,Nakamura F,Wakiwaka H.Consideration for a high resolution of magnetic rotary encoder[J].IEEE Transactions on Magnetics,1996,32(5):4959-4961.
