一种高精度、低成本旋转变压器信号解算器设计
2011-11-20刘仕钊
刘仕钊
(中国工程物理研究院总体工程研究所,四川绵阳621900)
0 引 言
旋转变压器作为一种测角元件,由于具有体积小、精度高、坚固耐用等特点,而被广泛应用于旋转伺服系统。但随着数字技术在伺服系统中的广泛应用,旋转变压器输出的包含有转子位置信息的模拟信号,必须转化为数字系统能够识别的数字信号才能进行控制处理。
目前,对旋转变压器输出信号的数字转换方法主要有两种:第一种方法是采用专用旋转变压器解算芯片实现转子位置解码[1-3]。该方法虽能实现高精度解码,但其成本较高;第二种方法是直接将旋转变压器输出的模拟信号送入A/D转换器,通过软件解算算法实现转子位置解码[4]。该方法虽能降低成本,但直接将包含高频信号的旋转变压器输出信号送入A/D转换器,大大提高了对A/D转换器转换速度的要求,从而使该方法大多局限于激磁信号频率较低(通常小于10 kHz)的场合。
激磁信号频率越高,解码精度越高[5]。在高性能旋转伺服系统中,为了满足转子位置的解码精度,激磁信号频率通常在15 kHz以上。为了降低成本,又不受A/D转换器转换速度的限制,本文首先采用信号调理电路对旋转变压器的输出信号进行处理,输出仅与转子位置相关的低频信号(通常为几百赫兹),再采用A/D转换器转换,便能大大降低对A/D转换器转换速度的要求,并结合数字信号处理器(DSP)中固化的软件解算算法解算出相应的转子位置。
1 旋转变压器的基本原理
旋转变压器是一种控制用的测角元件,它能将转子机械角转变成与该转角呈某一函数关系的电信号间接测量装置。按该函数关系对旋转变压器进行分类可分为线性旋转变压器、比例式旋转变压器、正余弦旋转变压器。本文主要针对正余弦旋转变压器输出信号的数字转换进行设计。正余弦旋转变压器电气示意图如图1所示。

图1 旋转变压器电气示意图
以单相绕组激磁为例,当在励磁绕组上输入正弦激磁电压信号:

根据电磁感应原理,正弦绕组和余弦绕组便会感应出相应的交流电势:

式中:θ为转子转过的角度;ω为激磁电压的频率;U0为激磁电压的最大幅值;k为励磁绕组与正余弦绕组间的电磁耦合系数,该系数通常较大,可达到1的数量级。
2 解算器原理
由式(2)和式(3)不难看出,正弦绕组和余弦绕组输出信号中包含高频信号和低频信号。若直接将此信号输入A/D转换器,受A/D转换器转换速度的限制,将导致高频信号采样不充分,从而使转子位置的解码精度得不到保证。
为了突破A/D转换器转换速度的限制,本文设计了一种信号调理电路。该电路的主要功能有抑制共模干扰信号、单端信号转换、绝对值加法运算、低通滤波、电位平移等功能。经该调理电路调理后的旋转变压器输出信号中仅包含与转子位置相关的低频信号,将该信号输入A/D转换器中处理,结合软件解算算法对转子转角位置进行解算,从而得到转子位置信息。解算器原理框图如图2所示。

图2 解算器原理框图
3 解算器设计及仿真
解算器主要包括信号调理电路和软件解算算法两部分。
3.1 信号调理电路
3.1.1 信号调理电路设计
信号调理电路原理框图如图3所示。

图3 信号调理电路原理框图
旋转变压器的输入、输出信号通常为差分信号,采用差分转换器在将该信号转换为单端信号的同时,又抑制了共模干扰信号;将转换后的单端信号输入绝对值加法电路处理,可得到幅值范围为0~2U0的信号,但该信号中包含与转子位置信号相位相反,高频部分交替出现的干扰信号,因此还需采用多路模拟开关对该信号作选择性输出;多路模拟开关采用经过零比较器和可调延时装置处理后的激磁信号触发,输出的信号再采用低通滤波器滤除高频成分,便可得到与转子位置相关的正余弦低频信号。
3.1.2 信号调理电路仿真
本文采用Matlab对信号调理电路进行仿真。在Matlab中,旋转变压器的激磁信号采用频率为18 kHz的正弦信号模拟;旋转变压器转子位置信号采用频率为500 Hz的正余弦信号模拟,在大多数伺服系统中,电机转速一般低于30 000 r/min,对于一对极旋转变压器,若电机转速为30 000 r/min,则通过上述信号调理电路处理后得到的转子位置信号频率约为500 Hz。采用Matlab模拟的旋转变压器输入输出信号如图4所示。

图4 旋转变压器输入、输出信号波形图
旋转变压器的三路单端信号经绝对值加法电路调理后得到的信号波形如图5所示。

图5 经绝对值加法电路调理后的信号波形图
再将该信号输入多路模拟开关和低通滤波器处理,得到如图6所示波形。

图6 选择输出、滤波后信号波形图
从图6中不难看出,有部分信号未得到充分的隔离,这是由于信号经过不同路径时,信号之间会有一定的相位差,从而使多路模拟开关的触发信号滞后产生的,因此还需采用延时装置对触发信号相位进行调整,调整后的信号波形如图7所示。

图7 相位调节后波形图
3.2 软件解算算法设计
3.2.1 软件解算算法原理
软件解算算法是建立在A/D转换的基础上,随着DSP的不断更新,其自带的A/D转换模块采样频率可达到几十甚至上百兆赫兹,足以满足输入DSP的低频信号(500 Hz)对A/D转换模块采样频率的速度要求,保证后续数据处理的顺利进行。在DSP中为了避免复杂的数学运算,提高软件的执行效率,通常使用查表法来实现信号的解算,该方法通常可使解算算法在极短时间内完成,以满足系统对实时性的要求,软件解算算法总体流程图如图8所示。
转子位置解算、转子旋转方向判断是软件解算算法中的核心部分。以下就这两个方面做详细叙述,转子位置解算及方向判断流程图如图9所示。

图8 软件解算算法总体流程图

图9 转子位置解算及方向判断流程图
软件解算具体步骤如下:
(1)为了节约DSP的存储空间,在此仅建立对应角度为0°~90°的正弦表,其对应的波峰值为Um,波峰和波谷的平均值为Ua。
(2)采样当前位置的正余弦信号值分别记为S、C,并备份该信号记为Sbak、Cbak,供判断转子旋转方向使用。
(3)由于仅建立了1/4周期的正弦表,若要实现对转子全角度的解算,还需根据变量S、C的值确定转子位置所在象限,转子位置象限判定方法如图9所示。在确定象限后,还需根据变量S查正弦表,确定转子的当前位置,转子当前位置确定方法如表1所示。

表1 转子当前位置判断表
(4)电机旋转方向的判断方法如表2所示。
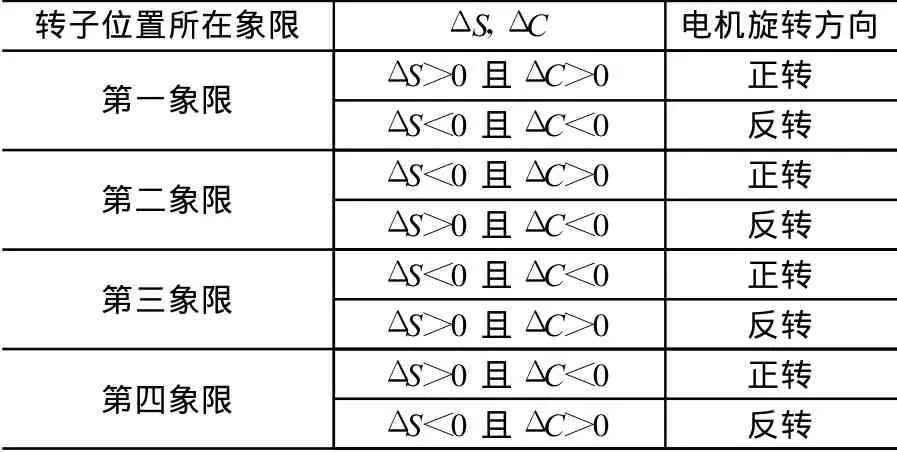
表2 电机旋转方向判断表
3.2.2 软件解算算法仿真
采用Matlab对DSP解算算法进行仿真,仿真波形如图10所示。示波器1、2通道为转子位置信号,通道为解算出的转子角度信号,由图10可看出,通过处理后,可实现对旋转变压器全角度的正确解码。

图10 解算算法仿真波形图
4 结 语
本文在分析现有旋转变压器测角系统的基础上,设计了一种高精度、低成本旋转变压器转子位置解算的方法,并对该设计中的信号调理电路和软件解算算法部分做了详细的介绍,用Matlab仿真软件对该设计的可行性进行了验证,在转子位置解码精度方面,还可通过提高激磁信号频率、使用采样精度更高的A/D转换器和改进软件解算算法等方法进行改良。
[1] 袁保伦,陆煜明,饶谷音.基于AD2S82A的多通道测角系统及与DSP接口设计[J].微电机,2007,40(7):47-49.
[2] 严春晓,张嵘.基于AD2S83和DSP的感应同步器测角系统[J].微计算机信息,2008,24(6-2):6-8.
[3] 吴红星.基于旋转变压器的电动机转子位置检测研究[J].微电机,2008,41(1):1-3,9.
[4] 范祝霞,欧阳红林,钱鋆,等.基于旋转变压器的PMSM驱动系统位置反馈的研究,电气传动,2010,40(3):40-42,52.
[5] 姜燕平.旋转变压器原理及其应用[J].电气时代,2005(10):982-100.
[6] 张志涌.精通MATLAB 6.5版[M].北京:北京航空航天大学出版社,2003.
