小型风力发电控制研究
2011-10-09周华伟
周华伟
(武汉理工大学 自动化学院,湖北 武汉 438200)
小型风力发电系统与太阳能发电相比,具有输入电压非直流且较大范围连续波动的特点,这给小型风力发电系统的控制带来一定的困难[1]。文中给出了一种方法,能实现包括最大功率控制、蓄电池充放电控制、风力发电与蓄电池同时或单独给负载供电的功能。通过对小型风力发电系统的能量流动进行分析,对系统能量进行合理的调度,提高能量的转换效率以期实现小型风力发电系统的优化及可靠运行。
文中设计一小型风力发电系统,最大功率为50 W。首先分析DC/DC变换器的工作模式。设计变换器工作于两种模式:1)当蓄电池处于低电位时,可以快速对其充电,或者当有负载接入,当前输出功率不足时,进行风机功率跟踪控制;2)当蓄电池处于高电位廛,可以对其进行慢充,或者无负载时,对DC/DC的控制恢复到默认值。
1 系统结构
小型风力发电控制系统基本结构都具很大相似性,如目前的整流器一般都采用不可控整流,当然也会有各自独特的地方。系统结构如下图1所示。它主要包括风力机发电机、不可控桥式整流器、DC/DC变换器、蓄电池、逆变器及控制系统组成。
风力机运行时有多种运行状态,如启动阶段、变速运行、稳定运行等,为了研究方便,只考虑风机在大于切入风速的条件下,进行稳定发电的状态。
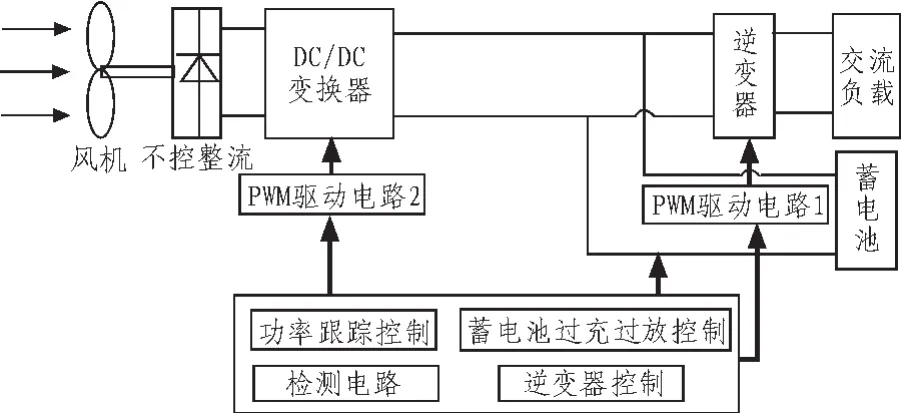
图1 小型风电结构图Fig.1 Structure of small wind power system
2 最大功率控制分析
文中的DC/DC变换器选用boost拓扑结构,当风力机捕获的风能不能满足负载用电和蓄电池充电时,需要调节风力机按照最佳叶尖速比运行,跟踪最大功率。目前常用的最大风能跟踪控制主要有3种方法,即最佳叶尖速比法,功率反馈法和爬山搜索法。
由于文中研究的小型风力发电系统,从可行性及经济效益方面考虑,此处采用爬山搜索法,其他两种方法可以查阅相关资料。
爬山搜索法的依据是在某一固定风速下,风力机的功率特性P(w)为凸函数。在有的文献中,也称为爬山法、功率扰动控制,通过人为的功率扰动进行离散迭代,使风机的工作点一步一步的沿其功率放大器曲线移动到最大什附近,且保持一定的波动。
爬山搜索法通过施加人为的转速扰动,然后通过测量功率的变化自动搜索发电机的最优转速点。这种算法无需知道精确的风力机特性,也无需测量风速和发电机的转速便能实现最大风能的捕获,缺点是即使风速稳定,发电机稳态功率输出仍有波动,控制周期不能太小,系统调节时间较长。
图2显示的是转子转速和风力机输出功率的关系。假如风速是v1,则转子速度ω1,即系统的工作点在点A处时可捕获到最大功率;若转子速度不为ω1,则系统不是工作在最大功率点。

图2 不同风速下转速与输出功率的关系Fig.2 Relationship of different wind speed and output power
理论分析:事实上,风力机只能吸收风能中的部分能量,其大小与风力系数有关,因此,根据风力机特性,做以下数学分析。
风力机特性:

由式(1)、式(2)得到:

风力机在功率最大点时,应满足:

式中,Pm:每秒叶轮捕获的风能(W),Cp:风能利用系数(一般为 1/3~2/5,最大可达 0.593), ρ:空气质量密度(kg/m3)A:风力机叶轮扫掠面积(m2),V:风速(m/s), ω:风轮旋转的角速度(rad/s), R:风轮半径, λ:叶尖速比。



3 电能管理
与太阳能发电相比,风力发电有一个显著的特点,那就是太阳能电池板只有在有光的条件下才能发电,即有白天黑夜之分[4],而风机则没有这种限制,因此,为了有效利用风能,需要对发出的电能进行管理。
3.1 控制器
文中的控制器选用PIC16F876,具有高性能RISC CPU,仅有35条单字指令,在线串行编程(ICSP),单独5 V内部电路串行编程 (ICSP),PWM模块最大分辩率为10位,10位多通道A/D转换。

图3 电能流动控制单元Fig.3 Control unit of power flow
在上图3中,左端为boost电路,当Q4导通时,若Q2也导通,则可以对蓄电池进行充电;当Q4截止且风电电压大于Ubattery时,不能对蓄电池充电,风机发出的电可单独供负载使用;当Q4截止且风电电压小于Ubattery时,不能对蓄电池充电,风电与蓄电池同时给负载供电。
3.2 软件设计
文中的软件部分包括:AD采样、蓄电池充放电控制。
3.2.1 AD采样
在PIC16F876中,采样的数据存放在ADRESL和ADRESH[5]里。本电路以阳极端作为参考点。AD转换的参考电压为其VSS、VDD,所以芯片AD模块输入的模拟量的量程为-5 V至0 V。其中-5 V对应AD模块转换结果0x00,0 V对应0x3f。转换程序如图4所示。转换计算方法举例如下:当电压转换为十位的数字量为0x0f,对应的模拟量为255;那么设AN0输入的电压的模拟量为x,则1 023/5=255/(x+5)。由此式可算出x的值。用x的值乘以分压比即可得实际电压值。

图4 A/D转换子程序Fig.4 Subroutine of A/D conversion
3.2.2 蓄电池充电控制
蓄电池管理程序如图5所示。
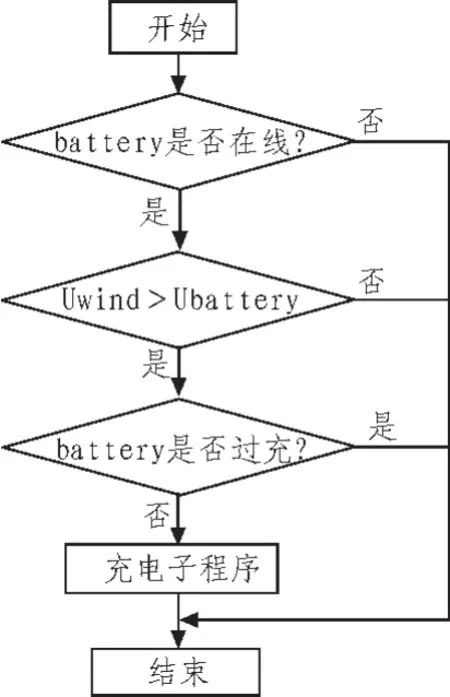
图5 蓄电池管理程序Fig.5 Battery management program

图6 电能流动控制程序Fig.6 Control program of power flow
3.2.3 能量流动控制
电能流动控制程序如图6所示。
4 结束语
对于小型风力发电系统,通常采用DC/DC变换器来实现对系统的功率控制[7]。文中结合本系统所采用的boost拓扑,求根溯源,从理论上推导了通过控制占空比来控制功率的理论的可行性,为使用这一结论提供理论支持。再结合该小系统的特点,设计了一种能量管理电路,提供了一种控制策略,利用了风机可连续运行的优点,且该设计具有较强可操作性的特点。
[1]李传统.新能源和可再生能源技术[M].南京:东南大学出版社,2005.
[2]陈亚爱.开关变换器的实用仿真与测试技术[M].北京:机械工业出版社,2009.
[3]王小娟.小型风力发电系统集成控制的设计与实现[D].内蒙古:内蒙古工业大学,2009.
[4]石赛兰.太阳能LED路灯节能控制系统的设计[D].武汉:武汉理工大学,2011.
[5]刘笃仁.PIC软硬件系统设计[M].北京:电子工业出版社,2005.
[6]Dixon L.Average current model control of switching power supplies[J].Product&Application Handbook,1993.
[7]李清勉,范旭娟.中国近海风力发电的发展及技术体系探讨[J].陕西电力,2011(08):65-68.
LI Qing-mian,FAN Xu-juan.Probe into development and technology system of offshore wind power in China[J].Shaanxi Electric Power, 2011(08):65-68.
