基于边界特征的车道标识线检测方法
2011-10-09刘仕照
刘仕照,钱 鹰
(重庆邮电大学自动化学院 重庆 400065)
近十几年来,安全辅助驾驶系统是当前国际智能系统的重要研究内容,其安全辅助驾驶技术的研究主要集中在车道偏离预警、前方障碍物探测、以及驾驶员状态监测等方面。基于道路检测技术的驾驶员辅助驾驶系统或预警系统,可以减轻驾驶员的压力和疲劳程度,提高行驶的安全性,减少交通事故的发生,提高交通效率。在车道偏离预警系统的研究当中,车辆的导航路径主要是车道标识线,因此,快速准确的识别车道标识线具有重要意义。目前,道路识别算法主要有图像特征法和模型匹配法[1-2],这两种方法都对复杂车道环境(如树木,房屋,阴影,车道标示线不明显)难以检测和错误检测。究其原因,绝大部分是由于在预处理时,图像分割效果不够好,导致后续的车道标识线识别出现偏差。
文中利用Sobel算子对原始道路图像进行边缘增强,采用基于边缘特征的阈值选取方法实现图像二值化,然后利用数学形态学滤波处理,除去杂散边缘和双边缘,最后结合抗干扰能力强的Hough变换识别出车道标识线。
1 图像预处理
由于摄像机所采集到的图像是主要有天空和道路区域两部分主要信息,且因为环境复杂,图像中可能含有无用噪声,不适应与车道标识线的直接提取,这就需要根据车道特征,确定道路区域,进行预处理,排除无用的信息,好的预处理算法可以有效提高车道线分割的正确率。本文预处理过程包括如下3个步骤:
1)灰度化:由于256色位图的调色板内容复杂,使得图像处理的许多算法没有办法展开,因此有必要进行灰度处理。本文灰度转换采用传统方法实现:

其中,Gray代表像素点的灰度值,R,G,B分别代表Red,Green和Blue的分量值。
2)均值滤波:中值滤波[3]是一种能在去除噪声的同时又能保护目标边界不使其变得模蝴的滤波方法,是一种非线性滤波技术。一维滤波的数学表达式如下:

其中,Sf(x,y)是当前点 f(x,y)的领域。 中值滤波会削弱三角信号的顶部峰值信号,但不影响阶跃信号和斜坡信号,对图像边缘有保护作用。在去除噪音的同时,可以比较好的保留边缘锐度和图像的细节。这些细节是我们进行道路标志提取的重要部分。
3)确定道路区域:摄像机采集的实际道路图像中,除了路面之外的其他图像信息都是属于无用信息,在算法实现中应该尽量避免处理这些无用信息,以减少计算量以提高算法的速度。在后续的Hough变换提取车道线时,对二值化处理后的图像保留图像的下半部分路面信息,将图像上半部分的天空部分当成背景掩去。
2 边界特征提取技术
2.1 最优阈值的选取
阈值化是图像分割中最重要的一种技术,传统的阈值分割算法主要有全局阈值法和局部阈值法,一般来说,前者对质量较好的图像有效,后者对环境复杂的图像有效。阈值选取的合理与否直接影响道路识别结果,为适应环境的变化,本文对车道图像采用全局阈值分割算法。目前有多种方法用于全局阈值的确定,例如:P-tile 方法、2-Mode 方法、OTSU 方法[4-5]等。
OTSU是1979年提出的最大类间方差(又名大律法),它是最佳门限将图像灰度直方图分割成两部分,使两部分类间方差取最大值,即分离性最大。
2.2 基于边缘特征的二值化
算法思想的关键:首先,用微分算子检测图象的边缘;然后,在这些边缘象素点上进行二值化阈值的自动选取;最后,对于其他非边缘象素点则采取常规方法进行二值化处理。该算法描述如下:
Step1:对输入图像进行灰度化、中值滤预处理得到图像f;Step2:利用OTSU算法确定图像f的一个整体阈值TH0;Step3:对f利用Sobel算子进行边缘提取,得到边缘特征图象e。
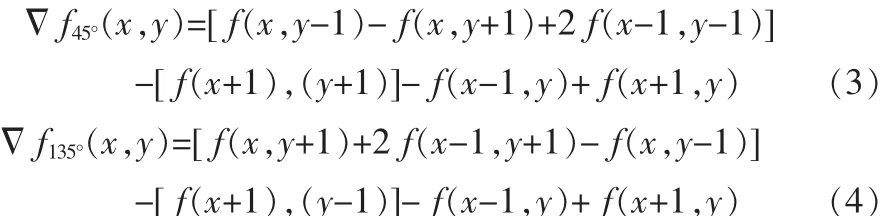
在进行车道检测和跟踪时,摄像机所获得道路图像中,平行的车道在图像远处近似相交于一点,车道线在图像中呈现45。和135。的方向。因此为更好检测车道线,在经典Sobel算子中需增加45。和135。的方向模版,如图1所示。

图1 45°和 135°方向模板Fig.1 45°and 145°direction template
则45°方向梯度和135°方向梯度的公式如下所示:Δ
Step4:对边缘特征图像e利用OTSU求取最优阈值进行常规二值化处理,得到二值图象b;
Step5:确定f的每个象素对应的阈值;
扫描Step4得到的二值图像b中的每一个像索,若某像素点是边缘像素点,令A等于Step1中图像f中对应像素点及其8邻域像素点的平均灰度值,并将该像素点及其8邻域像素点的值赋值为A;若像素点不是边缘像素点,就将该像素点及其8邻域像素点的阀值置为Th0。其算法描述如下:
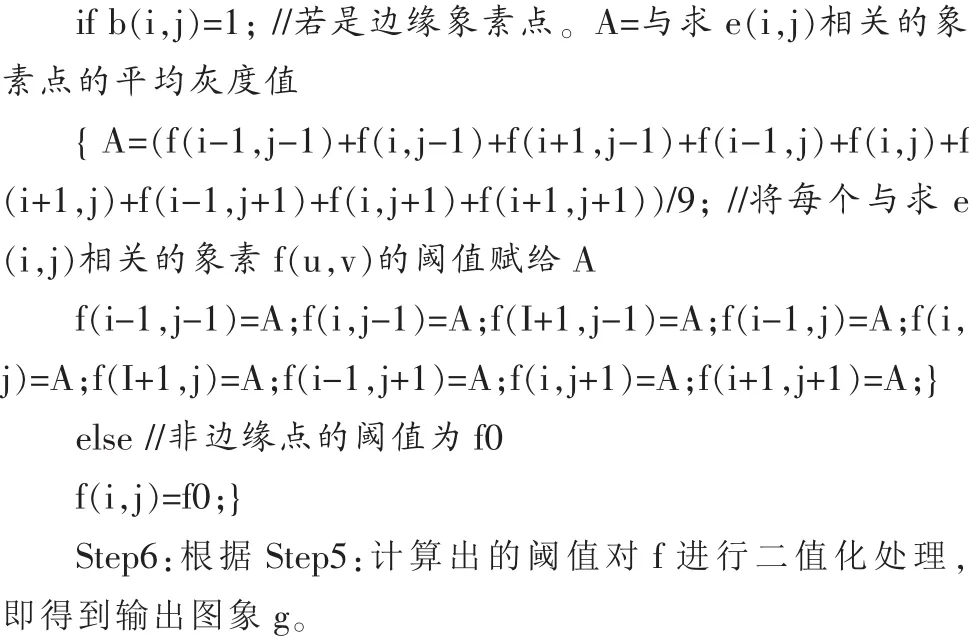
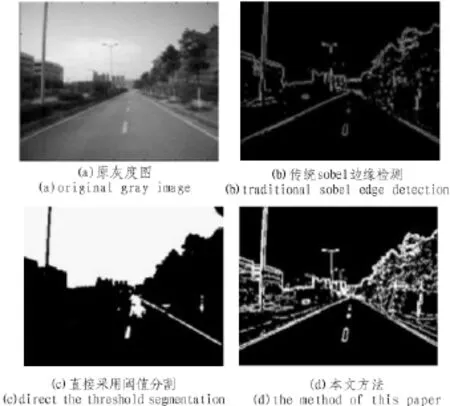
图2 二值化试验结果Fig.2 The test result of binary
根据以上所述进行试验,实验结果如图2所示,由实验结果可以看出,传统的Soble边缘检测后得到的二值图像损失了很多细节,远视野区域的车道标识线损失,不利于后续的车道线拟合;采用OTSU算法求得的阈值直接二值化图像使得左车道线完全消失,不利于后续车道线的识别与拟合;采用本文的基于边界特征的二值化方法,对车道图像进行二值化,保留了更多的边缘细节,车道标示线明显清晰无损,但也存在有双边缘的现象,需要对图像进一步细化处理。
3 形态学细化
数学形态学[6-7]是针对图像形态、结构等非线性因素的处理,数学形态学在图像处理中得到广泛应用,越来越多的系统采用形态学算子来对图像进行预处理和后处理。形态学原理简单、计算量小,能灵活构造具有车道线特征的结构元素,提取出车道左右标识线。 通过形态学处理能较好的去除双边缘、除去图像中的杂散边缘和孤立像素点,从而进一步简化和精确车道标识线,使得到的结果图像最大程度简化,从而使后续的hough变换速度更快。基本的形态学操作有腐蚀、膨胀、开启、闭合,形态学滤波器的一种实现方式是将开启和闭合结合起来。设A为输入图像(可以是灰度图和二值图),B是结构元素。
1) 开运算:A 被 B 的形态学开运算记着:A◦B=(AΘB)⊕B,这种运算是A被B腐蚀后再用B来膨胀的结果。开运算能消除图像中的细小对象,在不改变形状的情况下,削弱图像的尖峰噪声,平滑图像的边缘。
2)闭运算:A被 B的形态学闭运算记着:A·B=(A⊕B)ΘB,这种运算的是A被B膨胀后再用B来腐蚀的结果。闭运算能填充图像中细小的空洞。
由于开、闭运算具有各自的滤波效果又不同程度地影响到图像的目标信息,所以实际中一般采用形态学开、闭的级联形式,组成形态学组合滤波器[8-9]。常用的有开闭、闭开滤波器,分别用代表开和闭运算。对图2(d)中二值化的图像进行形态学细化,实验时采用2×2的square结构元素,实验结果如图3所示。开运算滤波之后删除了不包括结构元素的对象区域,平滑了对象轮廓,去掉了细小的突出部分,闭运算将狭窄的缺口连接成细长的弯口,填充了比结构元素小的漏洞。实验表明,采用闭开滤波器方法得到的图像边缘接近于理想边缘,去除了几乎所有高斯噪声引起的伪边缘。
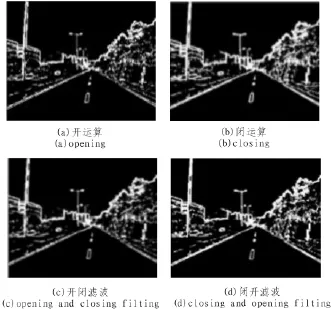
图3 形态学滤波结果Fig.3 Results of morphological filtering
4 Hough变换识别车道线
Hough变换的基本思想就是建立图像空间和参数空间的映射关系,即在图像空间中共线的点对应参数空间中相交的线,在参数空间中相交于同一个点的所有直线在图像空间里都有共线的点与之对应。
假设直线方程为:y=αx+b,对应的极坐标参数方程为:xcosθ+ysinθ=λ。其中ρ表示该直线到原点的距离,θ表示过原点到该直线的垂线与极轴正向之间的夹角。一般来说θ的取值范围是-90°≤θ≤90°,D的取值范围是-D≤λ≤D,其中D是图像中角点间的距离。
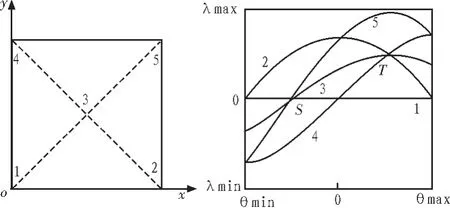
图4 hough变换描述Fig.4 Hough transform description
如图4所示,图像空间中过1、3、5的直线在交于参数空间中的S点,过2、3、4点的直线交于参数空间中的T点,因此,只要确定参数空间中共点的各曲线,就能确定图像空间中的直线。Hough变换的诱人之处是把λθ参数空间细分为了所谓的累加器单元,即编程时将参数ρ和θ量化成许多小格,对于每一个(xi,yi)点代入 θ的量化值,算出各个 λ,所得值落在某个小格内,便使该小格的计数累加器加l,当全部点(xi,yi)点变换后,对小格进行检验,有大的计数值的小格对应于共线,其(λ,θ)可用作直线的拟合参数。有小的计数值的各小格一般反映非共线点,丢弃不用。图5是Hough变换识别的车道线结果,在原图像中显示。

图5 Hough变换识别车道线Fig.5 Lane recognition in transforam
5 实验与结论
本实验采用尼康S230安装在面包车的后视镜下方,在贵阳市长岭南路环城高速路上获取道路图像,采用 Ulead GIF Animator 5将AVI车道视频文件转换到帧序列,处理对象为240×320的RGB图像。在 Inter E2180处理器,2 G内存,Widows XP操作系统,Matlab7.1环境下编程实现上述处理过程,分别对光照条件良好、阴暗天气、有阴影的车道线图像进行实验(如图6,左侧为原图,右侧为识别结果),每帧图像处理平均时间为0.3 s,能准确的检测出车道线,和实际车道线相吻合。其中对两个视频序列图像共400帧图像进行试验,能准确检测车道线的有386帧,检测率为96.5%,实验表明该算法抗干扰能力强,能克服路面阴影、桥梁、行车道、前方车辆的干扰,准确地识别出车道标识线。
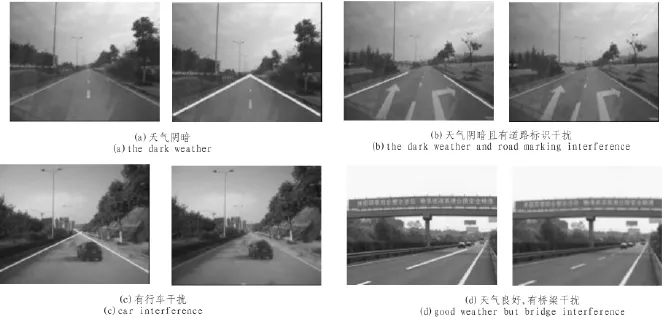
图6 车道标识线识别实验结果Fig.6 Results of lane identification
6 结束语
本文相对于传统车道线线识别算法中的图像二值化来说,本文算法简单,而且得到的图像边缘接近于理想边缘,明显提高了车道线检测的准确率。在道路阴影,道路标识线影响,前方车辆和桥梁干扰的条件下,都能准确的识别除车道标识线。但对一些非规范化道路环境的车道检测(弯道),车道中有树干的阴影及前方车辆及障碍物较多的情况还需进一步研究。
[1]Kim Z W.Robust lane detection and tracking in challenging scenarios[J].IEEE Transactions on Intelligent Transportation Systems,2008,9(1):16-26.
[2]王荣本,余天洪,顾柏园,等.基于边界的车道标识线识别和跟踪方法研究[J].计算机工程,2006,32(18):195-196,239.
WANG Rong-ben, YU Tian-hong, GU Bo-cyuan, et al.Research on linear lane mark identi-fication and track method based on edge[J].Computer Engineering,2006,32(18):195-196,239.
[3]黄涛,丁俊进.基于机器视觉道路识别算法的研究[J].电子设计工程,2007(4):34-38.
HUANG Tao,DING Jun-jin.Reseach of the road recognition algorthm based on the machine vision[J].Electronic Design Engineering,2007(4):34-38.
[4]吴冰,山海涛,郭建星.基于边缘灰度的二值化阈值确定方法[J].武汉大学学报:工学版,2003,36(3A):165-169.
WU Bing, SHAN Hai-tao, GUO Jian-xing.A new method edge-gray-based attaining the Threshold of image-binaried[J].Engineering Journal of Wuhan University,2006,36 (3A):165-169
[5]张庆英,岳卫宏,肖维红,等.基于边界特征的图像二值化方法应用研究 [J].武汉理工大学学报,2005,27(2):56-57,64.
ZHANG Qing-ying, YUE Wei-hong, XIAO Wei-hong, et al.Study on image binarizing process based on edge features[J].Journal of Wuhan University of Technology,2005,27(2):56-57,64.
[6]朱彤,阎莹,袁志业.一种基于形态学变换的车道检测方法[J].山东交通学院学报,2006,14(1):13-16.
ZHU Tong, YAN Ying, YUAN Zhi-ye.A new lane detection method based on morphological transformation[J].Journal of Shangdong Jiaotong University,2006,14(1):13-16.
[7]DeborahBraid, A lbertobroggi, Garysehmiede1.The terra max aut on omous vehicle concludesthe 2005 DARPAG Gr and challenge[C]//Intelligent Vehicles Symposium California,June,2006:534-539.
[8]Park H,Yoo J.Structuring element decomposition for efficient implementation of Morphological filters[J].IEEE Proceedings Vision Image and Signal Processing,2001,148(1):31-35.
[9]CHEN Min-hua,YAN Ping-fan.A multi-scaling approach based on Morphological Filtering[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2001,11 (7):694-700.