微幅摆重力加速度仪的设计
2011-09-27李成龙
李成龙,李 勇
(安徽理工大学理学院,安徽淮南230001)
微幅摆重力加速度仪的设计
李成龙,李 勇
(安徽理工大学理学院,安徽淮南230001)
微幅摆重力加速度仪采用容栅尺位移传感器测量摆长变化量,提高了测量精度,避免了摆球尺寸及重心偏移量的影响,微摆幅设计与高精度的计时装置,能使该仪器更准确地测量单摆的摆动周期,提高重力加速度的测量精度.
容栅尺;加速度;周期;圆锥摆;微幅摆
1 引 言
在物理实验中,重力加速度是最常用的的基本物理量.目前常用的测量方法有单摆法、自由落体法等.相对而言单摆测重力加速度,由于受悬线的质量及重物重心、尺度的影响,精度一般不高;而超高精度的经典绝对重力仪一般采用自由落体法,在真空中用原子钟计时、干涉法测距.为了提高单摆法测重力加速度的测量精度,减小测量误差,提高实验的重复性,我们研制了基于容栅尺位移传感器[1]与反射式激光计时器的微小摆幅重力加速度仪,该仪器结构简单,精确度高,操作方便,适合一般情况下的重力加速度的测量.
2 原 理
2.1 变摆长测量原理
设单摆初始摆长为 l1,摆动角度较小(θ<5°)[2],对应的摆动周期为 t1,则单摆近似的周期公式为

当改变单摆摆长为l2,测得摆动周期变为t2,则单摆近似的周期公式为

由(1)式和(2)式可得

(3)式中(l1-l2)即为摆长的变化量Δl,分母为对应的周期的平方差.因此测出摆长变化量与对应周期即可得出重力加速度值.
2.2 实验误差
单摆实验的首要误差来源是摆长的确定[3].利用式(3)测量加速度,优点是不用测整个摆长,即可以不考虑摆长的起点位置,也不用考虑摆长的终点位置,于是可以忽视摆球的物理重心(即不用测摆球的直径来修正测摆长的误差,而把它简单看成质点).当摆长变化量(l1-l2)很小时,甚至可以忽略摆线质量的影响.缺点是摆长变化量Δl很小时,对单摆摆动周期的测量及对摆长变化量的测量要求很高.为此在一般实验条件下,我们设计采用了容栅尺位移传感器测摆长的变化量,使Δl的测量精度达到0.01 mm.
单摆实验的另一个误差来源是摆幅[2-3].小角度摆动时(θ<5°),单摆可近似为简谐振动(sinθ≈θ),当摆角θ≈1°时,所引进sinθ≈θ的相对误差小于5.1×10-5.如果摆角过大误差亦大;另外摆动轨迹不在同一竖直平面内,即为圆锥摆[4],测得的周期将偏小,因为此时 T=2π为此在微幅摆重力加速度仪中,采用自制的高精度反射式激光计数计时仪测量周期[5],该计时器把激光发射接收一体化,利用摆球的光滑表面反射激光束,摆球微幅振动时,振幅被反射光所放大,反射的光斑触发计时器计时,使得该单摆的摆幅极小(θ<0.2°),即摆锤做毫米级的微幅振动,最大限度降低了近似简谐振动和摆球在平面上做圆周运动对实验的影响.
3 仪器结构
变摆长微摆幅单摆,即微幅摆,如图1所示,在支撑架上放置一手轮驱动的数字容栅尺,标尺上系着单摆的悬线,悬线经定滑轮、限位孔垂下,末端系以重物球.摆球重心至限位孔的距离即近似为该单摆摆长.转动手轮时,容栅尺标尺牵引着悬线移动,可改变摆长.反射式激光计时仪被固定在支架上,摆球表面需打磨一光滑小反射平面,激光束照射摆球反射表面,当摆球左右振动时,振幅被反射的激光束放大,反射回来的光斑被接收器接收,用来测单摆的振动周期.调节激光发送接收器与摆球的距离,可以获得较好的计时灵敏度[6].

图1 微幅摆仪器装置
旋转手轮将摆线放下足够长(实验取800~1 000 mm),调节好计时器.微幅摆动摆球,观察其摆动轨迹,满足测量条件(摆幅足够小,1~2 mm)即可开始测量其摆动周期t1.
将容栅尺示数清零,转动手轮,减小摆长.受到容栅尺与计时器的分辨力影响,摆长减小量尽量取大,一般Δl>5 cm.读取改变后的容栅尺示数,即为Δl.再微幅摆动摆球,满足测量条件后,再测量其摆动周期t2.
由式(3)代入测量数据即可算得重力加速度.
4 实验结果
实验测量某摆长下摆动10个周期的总时间,且分别测 8次取平均得出 ¯t1=19.600 s,¯t2=17.956 s.由容栅尺测得摆长改变量Δl=153.20 mm,具体数据如表1所示,代入(3)式得:g=9.795 7 m/s2.
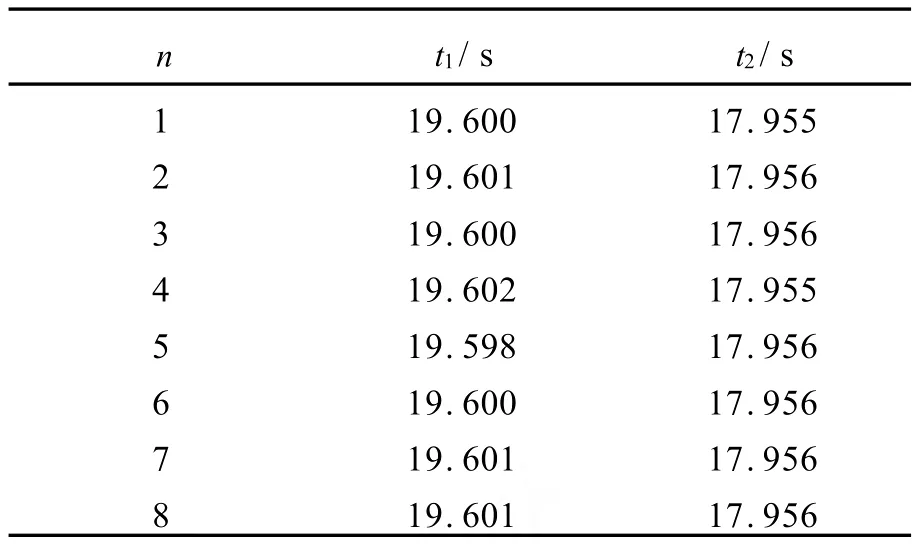
表1 实验数据
5 结 论
1)mm级的微幅振动与变摆长是该实验仪精度的根本保证,该装置克服了传统单摆实验的缺点,尽量减小各种误差的来源.
2)摆角为0.2°,cosθ=0.999 993 9,圆锥摆引入误差小于10-5;sinθ=0.003 490 651 415,θ的弧度值为0.003 490 658 5 rad,sinθ≈θ的近似误差小于10-8;故测得 g值的相对误差最小可达10-5.
3)数据偏差较小,说明仪器的重复性很好.
4)测多组 ti与Δl,可作 t21-t22与Δl的直线图,用作图法求g.
[1]杨重远,蔡萍.CPLD在数字式容栅位移系统设计与测试中的应用[J].工业仪表与自动化装置,2004,(3):49-52.
[2]易德文,盛忠志.利用单摆测重力加速度时的最大摆角的再讨论[J].物理实验,2003,23(7):44-48.
[3]杜方炳,杨红梅,夏湘芳.重力加速度测量仪的设计与制作[J].物理实验,2007,27(11):26-27.
[4]王晓秋,车忠海,戚非.可逆摆测重力加速度实验研究[J].大连大学学报,2004,25(4):21-24.
[5]李成龙,张洁,刘振.转动惯量实验计时装置的改进[J].物理实验,2010,30(2):38-39.
[6]钱小君.单片机控制的单摆实验系统[J].物理实验,2009,29(4):30-32.
[责任编辑:郭 伟]
Design of finely amplitudemodulating gravity accelerator
L ICheng-long,L IYong
(School of M athematics and Physics,Anhui University of Science and Technology,Huainan 232001,China)
The gravity accelerator adop ted themethod of measuring pendulum length by capacitive digital caliper disp lacement senso r.The diagraph of variety of simp le pendulum could be measured in high p recision,and the influence of the vibrator dimension and the deviation of the gravity center could be avoided.The period of simple pendulum wasmeasured more accurately by an additional timing installation w ith high p recision;hence the p recision of acceleration of gravity was raised.
capacitive digital caliper;acceleration;periodicity;pendulum of cone;pendulum of micro-sw ing
O321
A
1005-4642(2011)04-0036-03
2010-08-03;修改日期:2010-09-20
李成龙(1976-),男,安徽天长人,安微理工大学理学院实验师,硕士研究生,从事物理实验教学工作.